1.本实用新型涉及仓储物流设备的控制领域,具体地说是对中移载车控制系统。
背景技术:
2.目前,仓储物流中在多个不同的货架、仓库之间通常会设有轨道连接,并使用移载车来输送工件。在轨道穿梭车获取货物、再输送至下一地点的过程中,由于初始时工件在穿梭车上的放置通常较为人工操作,容易导致其位置不准确/精度不足,使得在抵达预设位置时,工件无法与下一地点的抓取部件完全对应。而为了解决这一问题,通常需要在停车后重新判断货物的位置,或是增设对中识别装置来辅助抓取部件,不仅浪费时间、人力,而且还需要增加额外设备,造成仓储物流的时间、制造成本上升。
3.业内设计一种可以再输送过程中进行对中调整的对中移载车来解决上述问题,对中移载车包括走行机构、横向、纵向的平移机构和若干测距单元。前述机构中设有多处作为动力源的电机,需要分阶段地更换操作,以实现运行流畅、提升工作效率;而各机构中的各部件的运行需符合要求,其移动位置、工作状态均有所要求和限制,故需要实时地感知其情况,以更好地进行操作,及时发现故障、避免发生事故。若是多个机构各自独立控制,不具有统一的远程系统,操作难度大、工件传递效率低;且难以及时地察觉故障情况,不能达到实际操作的需要。
技术实现要素:
4.本实用新型为解决现有的问题,旨在提供一种对中移载车控制系统。
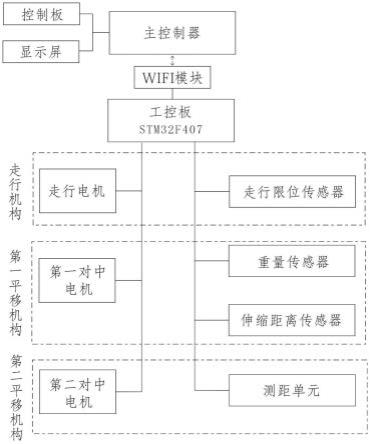
5.为了达到上述目的,本实用新型采用的技术方案包括走行机构、第一平移机构、第二平移机构和若干测距单元,还设有主控制器,主控制器设有供手动操作的控制板;所述主控制器通过无线网络与设于对中移载车的工控板通信连接;托举移载车中,还包括控制走行机构水平移动的走行电机、用于驱动第一平移机构作横向移动的第一对中电机、用于驱动第二平移机构纵向移动的第二对中电机和用于测量工件两端纵向距离的测距单元;所述走行电机、第一对中电机、第二对中电机和测距单元分别与工控板通信连接。
6.其中,第一平移机构包括伸缩臂,伸缩臂的上端面设有放置工件的托架;托架的底部设有用于测量所获得工件重量的重量传感器,伸缩臂上设有用于获得伸缩臂移动距离的伸缩距离传感器;重量传感器、伸缩距离传感器分别与工控板通信连接并发出信号。
7.其中,测距单元沿纵向设于走行机构的中轴线两端;第一平移机构将工件横向移动至中部后,测距单元分别检测其与工件两端的距离,并向工控板发出距离信号;驱动第二对中电机调整工件的纵向位置,直至两个距离信号为一致。
8.其中,所述工控板还与走行机构中的限制走行机构在轨道上移动范围的若干走行限位传感器通信连接,走行限位传感器超出阈值或发现故障时向工控板发出报警信号。
9.其中,工控板通过开关量输入模块完成对控制板的手动控制信号、限位信号或报警信号的采集;通过高速脉冲输出模块完成对走行电机、第一对中电机或第二对中电机的
脉冲输出;通过开关量输出模块完成对走行电机、第一对中电机或第二对中电机方向信号的输出;通过模拟量输入模块完成对走行限位传感器、重量传感器、测距单元、伸缩距离传感器的信号采集。
10.其中,所述工控板通过rs485通讯模块完成与wifi模块之间的通讯,wifi模块与主控制器通过无线网络实现通信连接。
11.其中,还包括电池单元,电池单元设于走行机构的电池箱中,并通过主动力电路上的主动力继电器分别接入走行电机、升降电机和伸缩电机的驱动器并供电;工控板向各驱动器输入脉冲和方向,驱动器则向第一工控板接入报警信号。其中,主动力继电器控制的四对常闭触点分别控制u、v、w、n,其线圈在紧急情况下得电、常闭触点断开,从而切断主动力电路,保护整个系统。其中,电池单元还包括用于检测其电量的电量检测传感器;所述电量检测传感器在电量低于安全阈值时,向主控制器发送报警信号。
12.和现有技术相比,本实用新型由位于工件前后两端的测距单元分别获取距离信息,然后进行纵向平移,对中操作简洁方便,无需再启用额外设备或复杂软件,也节省了成本;主控制器远程操控工控板分别控制走行电机、第一平移机构、第二平移机构的启停,与诸多获取机械部件位置、重量受力状态的传感器通信连接,实现了各机构的统一操作指挥;由传感器实时地感知各机构的运行状态,实时传输信号、及时报警;使得对中移载车的运行高效,操作便捷,事故率低。
附图说明
13.图1为本实用新型实施例的示意图;
14.图2为对中移载车的结构示意图;
15.图3为对中移载车的结构示意图;
16.图4为对中装置的结构示意图;
17.图5为第一平移机构的剖视图;
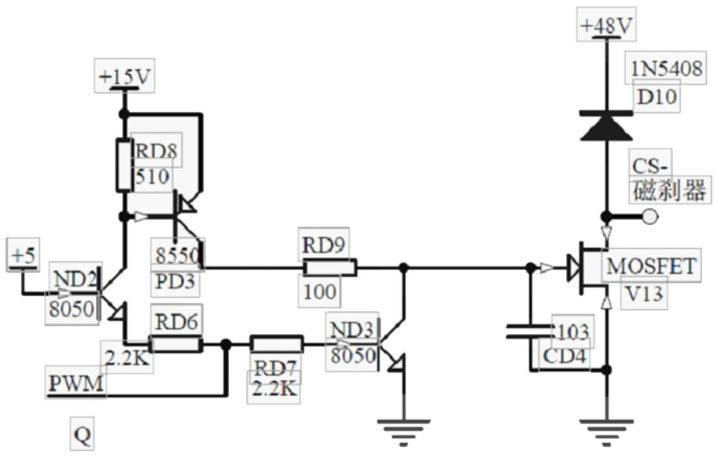
18.图6为本实用新型实施例的电气原理图;
19.参见附图,走行轮1,底架2,安装支架3,伸缩臂4,第一对中电机5,伸缩底座6,电池箱7,测距单元8,走行限位传感器9,电机10,减速器11,燕尾槽12,第二对中电机13,光杆14,对中丝杠15,支撑件16,主动齿轮17,齿条18,轴承19,齿轮20,伸缩距离传感器21,重量传感器22。
具体实施方式
20.现结合附图对本实用新型作进一步地说明。
21.参见图1至图6,图1至图6展示的是本实用新型的一个实施例,本实施例包括负责整个机构的水平行走的行走装置,和实现机构载货后对中的对中装置。参见图1,本实施例的控制部分包括主控制器,主控制器为工业计算机,作为客户端的主控制器设有供手动操作的控制板,其上有操作按钮;还设有显示屏。主控制器通过无线网络与设于对中移载车的工控板通信连接,并控制对中移载车的走行机构、第一平移机构、第二平移机构和两个分别用于测量工件两端纵向距离的测距单元。
22.主控制器通过wifi模块与工控板通信连接;wifi模块通过mqtt协议收发信息,经
过转化后通过485协议进行传送。工控板优选stm32f407芯片。
23.参见图2,走行机构用于在连接两个存储货架/设备的轨道上移动;为便于说明,将行走装置沿轨道的行进方向设为纵向,与之垂直的方向设为横向。走行机构包括底架,底架为矩形框体,其上端面一侧设为放置托举机构的区域,另一侧的区域设有电池箱,内置用于供电的电池单元。底架下端面还通过轴承与两端带有走行轮的车轴形成可转动连接。走行电机与第一工控板通信连接并受其控制,走行电机通过减速器带动车轴转动,进而实现沿轨道行走。
24.进一步地,参见图3,在底架的侧边设有走行限位传感器,走行限位传感器为激光测距模块,轨道行程起点、终点的边上设有若干对应的反射板;也可以选用金属接近开关tb1204-n。走行限位传感器分别与工控板通信连接,通过激光反射的信息,在走行机构到达起点(货区)、终点、充电点(柜区)或超出运行范围时,向工控板发出电信号或报警信号。若在各个预定位置中,走行限位传感器未接收到反射信号而报警,可手动通过主控制器控制走行电机进行位置的微调、校正。
25.参见图4,对中装置包括相互叠加设置的可用于横向移动的第一平移机构、用于纵向移动的第二平移机构和测距单元。两个平移机构在竖直方向上叠加后,可实现工件在两个水平自由度上的移动调整。本实施例中,一组两只测距单元(激光测距传感器)沿纵向设于行走装置的两端中央,两者连线之间的空间为其可测量范围。
26.参见图5,第一平移机构包括两组伸缩底座、以及对应的沿横向设置的伸缩臂。伸缩臂的下端面设有沿横向设置的凹槽,齿面朝下的齿条亦沿横向设于凹槽底部,并与轮面为竖直设置的齿轮啮合,实现传动。第一对中电机驱动其输出轴上的主动齿轮作正向/反向旋转,主动齿轮带动齿轮被动旋转,齿轮的轮齿通过拨动齿条而带动伸缩臂沿横向朝侧方伸出/缩回。
27.进一步地,伸缩臂上设有用于获得伸缩臂移动距离的伸缩距离传感器,优选金属接近开关tb1204-n,且伸缩距离传感器朝向伸缩臂的一侧端面。伸缩距离传感器分别与工控板通信连接,在超出阈值或发现故障时向工控板发出信号/报警信号。
28.参见图5,齿轮通过水平的齿轮转轴设于伸缩底座内的夹层内。齿轮上端伸出夹层并与齿条啮合,齿轮的下端与第一对中电机所驱动的主动齿轮啮合。作为优选,本实施例中有两组伸缩底座和伸缩臂,因此有两组齿轮、齿条机构。第一对中电机通过驱动沿纵向水平设置的光杆来分别驱动两个主动齿轮旋转,主动齿轮分别带动两个被动旋转的齿轮来拨动齿条,使得两具伸缩臂作同步移动。
29.参见图5,伸缩臂的两侧设有直线排列的若干轴承,轴承的上端略高于伸缩底座的顶面,轴承的上端还与伸缩臂凹槽的底部接触,承受重力,并起到引导移动、减少磨损的功能。
30.伸缩臂的上端面分别设有用于放置工件的托架,托架的造型与工件相适应;并且两只托架在纵向上对齐。进一步地,托架的底部还设有用于测量所获得工件重量的重量传感器,优选dllf轮辐式称重传感器;重量传感器与工控板通信连接,在获得重量或重量变化值时,向工控板发出信号。
31.参见图4和图5,第二平移机构包括用于支撑第一平移机构的支撑件,为横向设置的两根方形管,其顶部设有支撑伸缩底座下方连接板的连接块。支撑件通过其底部的滑块
可在纵向设置的滑槽内滑动。滑槽优选燕尾槽,且燕尾槽中安装多个滑块,利于保持良好的稳定和导向作用。
32.支撑件上的支撑座与螺纹套固定连接,继而螺纹套与对中丝杠形成可移动的丝杠-螺母机构;第二对中电机启动后带动对中丝杠旋转,驱动支撑件沿纵向移动。
33.作为优选,第二驱动单元驱动对中丝杠的一端,对中丝杠的另一端与固定用的尾座通过尾座轴承可旋转连接,利于对中丝杠保持水平和稳定。
34.参见图6,为本实用新型的电气原理图。工控板通过开关量输入模块完成对控制板的手动控制信号、限位信号或报警信号的采集;通过高速脉冲输出模块完成对走行电机、第一对中电机或第二对中电机的脉冲输出;通过开关量输出模块完完成对走行电机、第一对中电机或第二对中电机方向信号的输出;通过模拟量输入模块完成对走行限位传感器、重量传感器的信号采集。
35.设于走行机构电池箱中的电池单元通过主动力电路供电,为24v,主动力电路上的主动力继电器分别接入走行电机、第一升降电机、伸缩电机和抓取电机并供电。各电机的供电电路原理基本一致,即由主动力电路中的主动力继电器分别控制的u、v、w、三相接入电机驱动器。第一工控板向各驱动器输入脉冲和方向,驱动器则向第一工控板接入报警信号。主动力继电器控制的四对常闭触点分别控制u、v、w、n,其线圈在紧急情况下得电、常闭触点断开,从而切断主动力电路,保护整个系统。
36.作为优选,电池单元还包括用于检测其电量的电量检测传感器,电量检测传感器优选电量表fs-tf03,可在电量低于安全阈值时,向主控制器发送报警信号。随后可以操控走行机构移动至设于轨道中部位置的充电点(柜区)进行充电。使用时,操作者通过控制板进行操作,控制板上设有各电机启动/停止的按钮,显示器上有各传感器的参数。初始时,伸缩臂沿横向朝左侧伸出,通过在起点(货区)的人工操作手工吊臂或者机械臂将工件(圆柱体的完井工具)放置于托架上;至重量传感器发出重量值信号。启动第一对中电机,将放置有工件的伸缩臂朝右侧移动,直至伸缩臂到达中央位置时,伸缩距离传感器发出信号,第一对中电机停止运行。
37.启动走行电机,走行机构沿轨道移动至终点,至走行限位传感器获得起点(货区)处反射信号时停止。在此期间内,由作为测距单元的激光测距传感器接收工件两端反射的距离信号,即距离数值,由操作人员判断是否一致。若工件偏离居中位置,则启动第二对中电机,由其转动对中丝杠带动支撑件沿燕尾槽作纵向移动,直至两个距离信号为一致,工件处于纵向居中位置,关闭第二对中电机。
38.当走行机构移动至终点时,终点的抓取部件通过固定的预设动作即可直接、准确地抓取工件,无需再进行其他校对、调整等操作。完成后对中移载车的各机构复位,并回到起点(货区),循环下一次操作。
39.上面结合附图及实施例描述了本实用新型的实施方式,实施例给出的结构并不构成对本实用新型的限制,本领域内熟练的技术人员可依据需要做出调整,在所附权利要求的范围内做出各种变形或修改均在保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。