1.本公开的示例性实施方式涉及一种用于传达车辆的驾驶状况的设备及方法,更具体地,涉及一种能够通过车身向行人或周围车辆的驾驶员传递关于车辆的驾驶状况的信息的用于传达车辆的驾驶状况的设备和方法。
背景技术:
2.通常,车辆包括具有在夜间驾驶期间使驾驶员能够容易检查位于车辆附近的目标的照明功能的车灯、以及用于向其他车辆或道路使用者通知车辆的驾驶状况的信号功能。
3.例如,车灯通过使用灯直接发射光,并且包括通过向前发射光来确保驾驶员视线的前照灯、在踩刹车时开启的刹车灯、当车辆右转或左转时使用的转向指示灯,以及当车辆倒车时开启的倒车灯。另外,车辆包括安装在车辆的前部和后部并且反射光使得可以从外部容易地识别本车的反射器。
4.如上所述,安装在车辆的前部和后部的灯起到向外部通知车辆的驾驶状况和驾驶员的意图的作用。
5.然而,在相关技术中,由于仅使用安装在车辆的前部和后部的灯来通知车辆的驾驶状况,因此可视范围是有限的,并且仅传递限于意图表达和车辆的状况预测的信息。
6.在2018年10月10日注册并且发明名称为“vehicle lamp(车灯)”的韩国专利no.1908308中公开了本公开的相关技术。
技术实现要素:
7.各种实施方式涉及用于传达车辆的驾驶状况的设备及方法,其能够通过车身向行人或周围车辆的驾驶员传递关于车辆的驾驶状况的信息。
8.另外,各种实施方式涉及用于传达车辆的驾驶状况的设备及方法,其包括被配置为帮助周围车辆预测车辆的移动路线的通信照明模块,并且能够扩大车辆之间的通信范围。
9.在实施方式中,一种用于传达车辆的驾驶状况的设备,该设备可以包括:周围环境检测单元,其被配置为检测车辆的周围环境信息;驾驶状况检测单元,其被配置为检测车辆的驾驶状况;通信照明单元,其安装在车辆的车身上;以及控制单元,其被配置为基于车辆的周围环境信息,确定是否有对象位于车辆附近的指定距离内或在指定距离内接近车辆,并且在确定结果表示有相应的对象时通过通信照明单元输出指示车辆的驾驶状况的信息。
10.周围环境检测单元可以检测车辆的周围环境信息,周围环境信息包括环境亮度、天气信息、道路类型、车道宽度、障碍物位置以及周围车辆的距离和速度中的一种或更多种。
11.驾驶状况检测单元可以检测车辆的驾驶模式切换、方向切换、倒车、掉头、开始出发、停车、并线、刹车、启动、制动操作和避让转向中的一种或更多种。
12.通信照明单元可以安装在车辆的车身的前部、侧部、后部、顶部和底部中的一处或
更多处。
13.通信照明单元可以形成为与其在车身上的安装位置相对应的形状,并且形成或安装为与车辆的外观设计相对应的形状。
14.通信照明单元可以具有安装在通过细分四个方向(即,东、西、南和北)而获得的预定数量的方位上的多个光源。
15.控制单元可以考虑周围环境信息来调整安装在通信照明单元中的各个光源的发光强度。
16.控制单元可以通过安装在面向所检测的对象的方向上的通信照明单元,输出指示车辆的驾驶状况的信息。
17.在一个实施方式中,一种用于传达车辆的驾驶状况的方法,该方法可以包括以下步骤:由控制单元通过驾驶状况检测单元检测车辆的驾驶状况;由控制单元通过周围环境检测单元检测车辆的周围环境信息;由控制单元基于车辆的周围环境信息,确定是否有对象位于车辆附近的指定距离内或在指定距离内接近车辆;以及当有对象位于车辆附近的指定距离内或在指定距离内接近车辆时,由控制单元通过通信照明单元输出指示车辆的驾驶状况的信息。
18.在检测车辆的驾驶状况的步骤中,控制单元可以检测车辆的驾驶模式切换、方向切换、倒车、掉头、开始出发、停车、并线、刹车、启动、制动操作和避让转向中的一种或更多种。
19.车辆的周围环境信息可以包括环境亮度、天气信息、道路类型、车道宽度、障碍物位置以及周围车辆的距离和速度中的一种或更多种。
20.在通过通信照明单元输出信息的步骤中,控制单元可以通过安装在面向所检测的对象的方向上的通信照明单元输出指示车辆的驾驶状况的信息。
21.在通过通信照明单元输出信息的步骤中,控制单元考虑周围环境信息来调整安装在通信照明单元中的光源的发光强度。
22.根据本公开的一个方面,用于传达车辆的驾驶状况的设备及方法可以通过车身向行人或周围车辆的驾驶员输出关于车辆10的驾驶状况的信息,从而提高车辆(或自主驾驶车辆)中用户的便利性和稳定性以及行人或对向车辆(on-coming vehicle)的驾驶员的稳定性。
23.根据本公开的另一方面,用于传达车辆的驾驶状况的设备及方法可以包括通信照明单元,其通过车身传递信息,使得行人和周围车辆能够预测车辆的移动路线,从而扩大了车辆之间的通信范围,并提高与周围车辆的稳定性。
24.根据本公开的一个方面,根据本公开的又一方面的用于传达车辆的驾驶状况的设备和方法可以通过作为针对自主驾驶所指定的照明配置的象形图(信息传递的灵活性)照明来提高车辆外部的适销性(美学效果)和可视性。
25.本公开的效果不限于上述效果,还可以包括根据以下将要描述的内容的各种效果,只要这些内容对于本领域技术人员而言显而易见即可。
附图说明
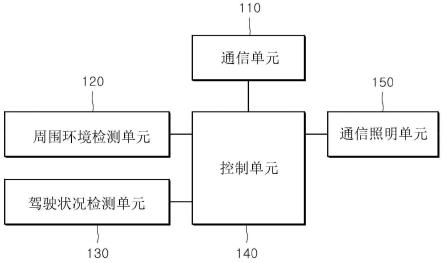
26.图1是示意性地例示了根据本公开的实施方式的用于传达车辆的驾驶状况的设备
的框图。
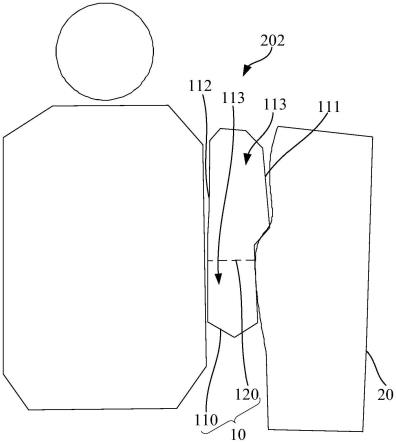
27.图2是用于描述根据本公开的实施方式的通信照明单元的图。
28.图3是用于描述根据本公开的实施方式的安装在车辆的后部的通信照明单元的图。
29.图4a至图4f是用于描述根据本公开的实施方式的用于通过通信照明单元输出关于车辆的驾驶状况的信息的方法的图。
30.图5是用于描述根据本公开的实施方式的用于传达车辆的驾驶状况的方法的流程图。
具体实施方式
31.按照相应领域的传统,可以在附图中以功能块、单元和/或模块的方式来例示一些示例性实施方式。本领域普通技术人员将理解,这些块、单元和/或模块是由诸如以下的电子(或光学)电路物理实现的:逻辑电路、分立组件、处理器、硬接线电路、存储器元件、接线连接等。当块、单元和/或模块由处理器或类似硬件实现时,可以使用软件(例如,代码)对它们进行编程和控制以执行本文讨论的各种功能。另选地,每个块、单元和/或模块可以由专用硬件或作为执行某些功能的专用硬件和执行其他功能的处理器(例如,一个或更多个已编程处理器和相关联的电路)的组合来实现。在不脱离本发明概念的范围的情况下,一些示例性实施方式的每个块、单元和/或模块可以物理地分离成两个或更多个相互作用和离散的块、单元和/或模块。此外,在不脱离本发明概念的范围的情况下,一些示例性实施方式的块、单元和/或模块可以物理地组合成更复杂的块、单元和/或模块。
32.在下文中,将通过各种示例性实施方式参照附图来描述用于传达车辆的驾驶状况的设备及方法。应当注意,附图不是精确地按比例的,并且仅为了描述的方便和清楚起见,可能夸大了线条的粗细或组件的尺寸。此外,本文所使用的术语是通过考虑本发明的功能来定义的,并且可以根据用户或操作者的习惯或意图而改变。因此,术语的定义应根据本文提出的整体公开而做出。
33.例如,本说明书中描述的实施方式可以用方法或过程、装置、软件程序、数据流或信号来实现。尽管仅在单个上下文中讨论了特征(例如,仅在方法中进行讨论),但是所讨论的特征可以在另一种类型(例如,设备或程序)中实现。设备可以以合适的硬件、软件或固件来实现。方法可以在诸如处理器之类的装置中实现,处理器一般是指包括计算机、微处理器、集成电路或可编程逻辑器件的处理装置。处理器还包括便于终端用户之间的信息通信的通信装置(诸如计算机、蜂窝电话、pda(个人数字助理)和其他装置)。
34.图1是示意性地例示了根据本公开的实施方式的用于传达车辆的驾驶状况的设备的框图,图2是用于描述本公开的实施方式的通信照明单元的图,图3是用于描述根据本公开的实施方式的安装在车辆的后部的通信照明单元的图,并且图4a至图4f是用于描述根据本公开的实施方式的用于通过通信照明单元输出关于车辆的驾驶状况的信息的方法的图。
35.参照图1,根据本公开的实施方式的用于传达车辆驾驶状况的设备包括通信单元110、周围环境检测单元120、驾驶状况检测单元130、控制单元140和通信照明单元150。
36.通信单元110是用于与周围车辆进行通信的组件,并且可以向周围车辆发送驾驶状况信息和从周围车辆接收驾驶状况信息。周围车辆的驾驶状况信息可以包括周围车辆的
状态信息(驾驶信息、驾驶模式、速度等)和周围识别信息(道路信息和天气信息等)。例如,这样的通信单元110可以是v2x(vehicle to everything:车辆到万物)通信单元。v2x通信可以统一表示通过与车辆10的所有接口的通信技术,并且包括v2v(vehicle to vehicle:车辆到车辆)、v2i(vehicle to infrastructure:车辆到基础设施)等。
37.例如,通信单元110可以与在车辆10的前方的前方车辆/后方的后方车辆或在相邻车道上的车辆进行v2x通信。相邻车道表示车辆10可以将驾驶车道改变至其的车道,并且对应于与车辆10的驾驶车道邻接的任一车道。具体而言,通信单元110可以接收周围车辆的状态信息并将接收到的状态信息提供给控制单元140。
38.周围环境检测单元120可以检测车辆10的周围环境信息。也就是说,周围环境检测单元120可以检测车辆10的周围环境信息,周围环境信息包括周围对象信息、周围交通信息和天气信息。对象可以包括车辆、道路设施、行人等,周围对象信息可以包括周围车辆(前方车/后方车)的速度和距离,周围交通信息可以包括事故多发区信息等,并且天气信息可以包括下雨、照度、温度等。
39.驾驶环境检测单元在类型方面没有特别限制,只要驾驶环境检测单元可以感测车辆10的周围环境信息即可。驾驶环境检测单元的示例可以包括摄像头、超声波传感器、激光雷达传感器、雷达传感器、天气传感器、光线传感器、照度计等。
40.周围环境检测单元120可以通过通信单元110与车辆附近的交通基础设施、另一车辆和用户的移动电话进行通信(例如,v2p或v2v),并通过附加地使用从交通基础设施、另一车辆或用户的移动电话接收到的信息,来检测车辆10的周围环境信息。
41.驾驶状况检测单元130可以检测车辆10的驾驶状况。也就是说,驾驶状况检测单元130可以检测车辆10的驾驶模式切换、方向切换、倒车、掉头、开始出发、停车、并线、刹车、启动、制动操作和避让转向。
42.此时,车辆10的驾驶状况可以包括驾驶模式切换、方向切换、倒车、刹车等。驾驶模式切换可以指示从正常驾驶模式切换到自主驾驶模式或者从自主驾驶模式切换到正常驾驶模式,并且方向切换可以指示向右或向左移动。
43.这样的驾驶状况检测单元130可以通过倒车灯的开启而检测到车辆10的倒车,通过转向指示灯的开启而检测到车辆10的方向切换,通过刹车灯的开启而检测到车辆10的刹车,并通过自主驾驶控制器检测到车辆10向自主驾驶模式的模式切换。驾驶状况检测单元130可以通过传动装置等检测车辆10的前进/后退运动,并通过车轮或方向盘的旋转角度、驾驶员的操作、车道检测等来检测车辆10的方向切换。驾驶状况检测单元130在类型方面没有特别限制,只要驾驶状况检测单元可以检测车辆10的驾驶状况即可。驾驶状况检测单元130的示例可以包括摄像头、超声波传感器、激光雷达传感器、雷达传感器、imu传感器和位置传感器(gps模块)。
44.控制单元140可以基于车辆10的周围环境信息确定是否有对象位于车辆10附近的指定距离内或在指定距离内接近车辆10。当确定结果表明存在相应的对象时,控制单元140可以通过通信照明单元150输出指示车辆10的驾驶状况的信息。
45.也就是说,控制单元140可以确定对象(例如,行人、对向车辆、两轮车等)是否在车辆10附近或接近车辆10。当对象在车辆10附近以及接近车辆10时,控制单元140可以通过通信照明单元150输出指示由驾驶状况检测单元130检测到的车辆10的驾驶状况的信息。此
时,控制单元140可以通过安装在面向所检测的对象的方向上的通信照明单元150输出指示车辆10的驾驶状况的信息。
46.由控制单元140通过通信照明单元150输出的信息可以用于帮助对象(例如,行人、对向车辆或两轮车)认识车辆10的当前状况和未来状况(例如,驾驶方向切换、停止或开始启动)。因此,控制单元140可以在对象(例如,行人、对向车辆或两轮车)可以看到信息的方向或面对对象的方向上输出信息。如果对象位于车辆的前方,则控制单元140可以将信息输出到车身的前部,如果对象位于车辆的右方,则将信息输出到车身的右侧,或者如果对象位于车辆的后方,则将信息输出在车身的后部。
47.此外,控制单元140可以考虑由周围环境检测单元120检测到的周围环境信息,来调整安装在通信照明单元150中的每个光源的发光强度。此时,可以通过控制电流值来调整光源的发光强度。例如,控制单元140可以考虑环境照度来调整通信照明单元150的发光强度。此时,当环境照度低于参考照度时,控制单元140可以将安装在通信照明单元150中的光源的发光强度调整为比参考发光强度更低的值。此时,当环境照度高于参考照度时,控制单元140可以将安装在通信照明单元150中的光源的发光强度调整为比参考发光强度更高的值。
48.此外,控制单元140可以考虑天气信息来调整通信照明单元150的发光强度。
49.通信照明单元150可以安装在车辆10的车身上,并且输出指示车辆10的驾驶状况的信息。车辆10的车身可以包括其前部、侧部、后部、顶部和底部。
50.通信照明单元150可以包括能够指示方向的多个光源,并且发光二极管可以用作每个光源。然而,本公开不限于此。例如,通信照明单元150可以由一个或更多个led组成,并且根据照明的功能在发射特定颜色的光(诸如蓝、绿、黄或红)的同时开启/关闭。led可以单独操作并渐近开启以输出关于车辆10的驾驶状况的信息。此外,通信照明单元150可以在通过使用led在执行照明灯功能的同时作为显示面板执行信息输出功能。例如,通信照明单元150可以输出文本、图像、象形图、图形、数字等。
51.例如,通信照明单元150可以具有图2所示的形状。参照图2,通信照明单元150可以具有安装在通过细分四个方向(即,东、西、南和北)而获得的特定数量的方位上的光源。
52.参照图3,例如,具有图2的形状的通信照明单元150可以安装在车身的后部。
53.通信照明单元150可以依据其在车身上的安装位置(例如,车身的前部、侧部或后部)以相同或不同的形状安装(或形成)。也就是说,通信照明单元150可以以与车辆10的外部设计(车身设计)相对应的形状安装(或形成)。
54.通信照明单元150可以包括多个光源,该多个光源在控制单元140的条件下开启/关闭的同时输出关于车辆10的驾驶状况的信息。此时,通信照明单元150的多个光源可以单独操作以渐进方式发射光。也就是说,通信照明单元150的各个光源可以逐渐打开/关闭。此时,可以预先随机设置光源开启的持续时间、光源关闭的持续时间以及光源开启的持续时间与光源关闭的持续开启之间的时间间隔。
55.通信照明单元150可以通过光图案和颜色的各种组合来显示与车辆10的驾驶状况等有关的信息。
56.例如,通信照明单元150可以以不同方式显示各种状况,各种状况包括车辆在自主驾驶模式下停止的状况、车辆正在切换到自主驾驶模式的状况以及车辆正以自动驾驶模式
驾驶的状况。通信照明单元150可以在车辆10的所有方向上显示与车辆10的驾驶有关的信息、字符和符号。
57.除了通信照明单元150之外,车辆10还包括诸如刹车灯、倒车灯和转向指示灯的现有车灯。因此,安装在车身上的通信照明单元150可以与现有车灯的功能同时操作。
58.也就是说,通信照明单元150可以利用安装在车辆10中的刹车灯、倒车灯、转向指示灯等输出指示车辆10的驾驶状况的信息。因此,从车辆10的左后方或右后方以及后方接近车辆10的周围车辆也可以通过通信照明单元150容易地检查车辆10的驾驶状况,并针对该驾驶状况而做准备。
59.例如,当车辆10正在停车时,刹车灯和通信照明单元150可以向接近车辆10的周围车辆通知车辆10正在停车。当车辆10倒车时,倒车灯和通信照明单元150可以向接近车辆10的周围车辆通知车辆10正在倒车。当车辆10正在切换方向时,转向指示灯和通信照明单元150可以向接近车辆10的周围车辆通知车辆10正在切换方向。因此,周围车辆的驾驶员可以针对车辆10的刹车、倒车和方向切换而做准备。
60.将参照图4描述用于通过安装在车身的后部的通信照明单元150向目标(例如,行人或另一车辆的驾驶员)传递指示车辆10的驾驶状况的信息的方法。当车辆10意欲左转时,控制单元140可以控制通信照明单元150,以输出指示左转的信息,如图4a所示。当车辆10意欲并线车道时,控制单元140可以控制通信照明单元150以输出指示并线的信息,如图4b所示。当车辆10意欲进行掉头时,控制单元140可以控制通信照明单元150以输出指示掉头的信息,如图4c所示。当车辆10意欲执行避让转向时,控制单元140可以控制通信照明单元150以输出指示避让转向的信息,如图4d所示。当车辆10准备出发时,控制单元140可以控制通信照明单元150,以输出指示准备出发的信息,如图4e所示。当车辆10意欲倒车时,控制单元140可以控制通信照明单元150,以输出指示倒车的信息,如图4f所示。
61.如上所述,可以通过通信照明单元150显示关于车辆10的驾驶状况的信息,这使得可以提高用户的便利性和稳定性。
62.根据本公开的实施方式的用于传达车辆10的驾驶状况的设备还可以包括显示单元(未示出)和地图存储单元(未示出),地图存储单元用于存储包括车辆10的当前位置和路线以及道路和交通设施的数字地图。在这种情况下,控制单元140可以通过使用地图存储单元的地图和由位置传感器(未示出)感测到的位置,来搜索车辆10的当前状态(state)和路线。控制单元140可以通过使用通过周围环境检测单元120检测到的周围环境信息以及车辆10的当前状态和路线,通过显示单元输出车辆10的驾驶状况。
63.图5是用于描述根据本公开的实施方式的用于传达车辆的驾驶状况的方法的流程图。
64.参照图5,在步骤s510,控制单元140通过驾驶状况检测单元130检测车辆10的驾驶状况。此时,控制单元140可以检测车辆10的驾驶模式切换、方向切换、倒车、掉头、开始出发、停车、并线、刹车、启动、制动操作和避让转向中的一种或更多种。
65.当执行步骤s510时,控制单元140在步骤s520中通过周围环境检测单元120检测车辆10的周围环境信息,并在步骤s530中基于车辆10的周围环境信息,确定是否有对象位于车辆10附近的指定距离内或者在指定距离内接近车辆10。
66.当步骤s530的确定结果表明有对象位于车辆10附近的指定距离内或在指定距离
内接近车辆10时,控制单元140在步骤s540中向通信照明单元150输出指示车辆10的驾驶状况的信息。
67.例如,当车辆10意欲左转时,控制单元140可以控制通信照明单元150,以输出指示左转的信息,如图4a所示。当车辆10意欲并线车道时,控制单元140可以控制通信照明单元150以输出指示并线的信息,如图4b所示。当车辆10意欲掉头时,控制单元140可以控制通信照明单元150以输出指示掉头的信息,如图4c所示。当车辆10意欲执行避让转向时,控制单元140可以控制通信照明单元150以输出指示避让转向的信息,如图4d所示。当车辆10准备出发时,控制单元140可以控制通信照明单元150以输出指示准备出发的信息,如图4e所示。当车辆10意欲倒车时,控制单元140可以控制通信照明单元150以输出指示倒车的信息,如图4f所示。
68.如此,根据本公开的一个方面的用于传达车辆的驾驶状况的设备和方法可以通过车身向行人或周围车辆的驾驶员输出关于车辆10的驾驶状况的信息,从而提高车辆(或自主驾驶车辆)中用户的便利性和稳定性以及行人或对向车辆的驾驶员的稳定性。
69.根据本公开的另一方面的用于传达车辆的驾驶状况的设备和方法可以包括通信照明单元150,其通过车身传递信息使得行人和周围车辆能够预测车辆10的移动线路,从而扩大车辆之间的通信范围并提高与周围车辆的稳定性。
70.根据本公开的又一方面的用于传达车辆的驾驶状况的设备和方法可以通过作为针对自主驾驶所指定的照明配置的象形图(信息传递的灵活性)照明来提高车辆外部的适销性(美学效果)和可视性。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。