1.本公开涉及一种印刷装置。
背景技术:
2.专利文献1公开了下述的丝网印刷装置。控制部将层信息赋予掩模更换部,掩模更换部将掩模(例如丝网掩模或金属掩模)从由存储仓(magazine)的层信息指定的层向印刷区域取出。相机获得该掩模的图像并将其向掩模识别电路输出。控制部向掩模识别电路指示应该收纳于上述层的掩模的种类。掩模识别电路将与控制部指示的掩模的种类对应的开口部的数据同相机的图像进行比较,并判别一致或不一致。若该判别结果为一致,则印刷区域的掩模被解释为对于印刷而言是恰当的,若该判别结果为不一致,则印刷区域的掩模被解释为对于印刷而言是不恰当的。
3.【在先技术文献】
4.【专利文献】
5.专利文献1:日本特开平7-214747号公报
技术实现要素:
6.发明要解决的课题
7.专利文献1所公开的方法中,为了拍摄掩模的开口部,需要将掩模从存储仓的层向印刷区域抽出,不能在收纳于存储仓的层的状态下识别掩模的种类。因此,专利文献1所公开的方法中,不能从收纳于存储仓的各层的掩模中自动地抽出使用于印刷的掩模。
8.本公开的目的在于提供一种能够从收纳于存储仓的各层的掩模中自动地抽出使用于印刷的掩模的印刷装置。
9.用于解决课题的方案
10.本公开的一方案的印刷装置具备:印刷部,其使用形成有规定的印刷图案的掩模向基板印刷焊料膏剂;读取部,其能够读取对收纳于存储仓的货架的所述掩模赋予的编码,所述存储仓具有能够收纳所述掩模的多个所述货架;以及控制部,其将被读取了所述编码的所述货架的位置与所读取的所述编码所示的信息建立对应关系而生成存储仓内掩模信息。
11.需要说明的是,这些包括性的或具体的方案可以通过系统、装置、方法、集成电路、计算机程序或记录介质来实现,也可以通过系统、装置、方法、集成电路、计算机程序及记录介质的任意的组合来实现。
12.发明效果
13.根据本公开,印刷装置能够从收纳于存储仓的各层的掩模中自动地抽出使用于印刷的掩模。
附图说明
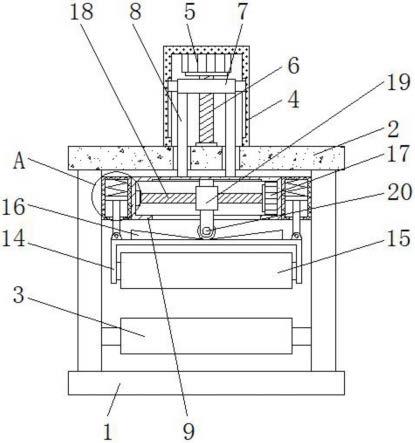
14.图1是本实施方式的具备掩模更换器的印刷装置的立体图。
15.图2是本实施方式的印刷装置的局部透视立体图。
16.图3是本实施方式的印刷装置的透视侧视图。
17.图4是本实施方式的掩模更换器中的壳体的透视立体图。
18.图5是本实施方式的掩模更换器中的壳体的透视侧视图。
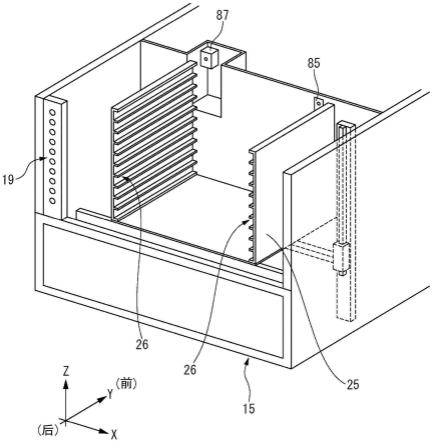
19.图6是表示本实施方式的编码读取器及光学传感器的位置的局部透视立体图。
20.图7是表示本实施方式的掩模中的二维码的位置的立体图。
21.图8是表示本实施方式的印刷装置的控制部的框图。
22.图9是表示本实施方式的存储仓内掩模信息的一例的图。
23.图10是用于说明本实施方式的led按钮与第一模式及第二模式之间的关系的图。
24.图11是表示本实施方式的第一模式的情况下的掩模识别部的处理的流程图。
25.图12是表示本实施方式的第二模式下的掩模识别部的处理的流程图。
26.附图标记说明:
27.11 印刷装置
28.13 印刷部
29.15 掩模更换器
30.17 印刷部罩
31.19 led按钮
32.21 基板输送保持部
33.23 壳体
34.25 存储仓
35.26 货架
36.27 掩模
37.29 开口部
38.31 触摸面板
39.33 掩模引导件
40.35 掩模保持部
41.37 印刷头
42.39 刮刀单元
43.41 掩模上表面清洁器
44.43 气体吹送部
45.45 掩模保持部升降工作缸
46.47 工作缸
47.49 掩模移动机构
48.51 相机
49.53 掩模下表面清洁器
50.55 管状部
51.57 阀部
52.59 移动基座
53.61 升降致动器
54.63 抽出板
55.65 升降机
56.71 掩模通过开口
57.73 升降体
58.75 升降体支承部
59.77 螺母部
60.79 滚珠丝杠
61.81 升降体升降马达
62.85 光学传感器
63.86 二维码
64.87 编码读取器
65.88 未使用区域
66.89 使用完毕区域
67.93 控制部
68.95 基板输送保持控制部
69.97 掩模输送设置控制部
70.99 印刷动作控制部
71.101 拍摄控制部
72.102 掩模识别部
73.103 存储仓内掩模信息
74.105 升降机控制部
75.107 移动基座驱动马达
76.109 刮板基座驱动马达
77.111 刮板升降驱动部
78.kb 基板
79.mgsp 存储仓供给位置
80.mssp1 掩模供给位置
81.pst 焊料膏剂
82.sp 内部空间
83.sp1 供给空间
84.sp2 作业空间。
具体实施方式
85.以下,适当参照附图来对本公开的实施方式详细说明。但是,有时省略必要程度以上的详细的说明。例如,有时省略已经熟知的事项的详细说明及相对于基本相同的结构的重复说明。这是为了避免以下的说明不必要地变得冗长,使本领域技术人员容易理解。需要说明的是,附图及以下的说明是为了本领域技术人员充分地理解本公开而提供的,并不意
在由此限定技术方案的记载的主题。
86.(本实施方式)
87.《印刷装置的结构》
88.参照图1至图3来说明印刷装置11的概要。印刷装置11也可以改读作丝网印刷装置。图1是本实施方式的具备掩模更换器15的印刷装置11的立体图。图2是本实施方式的印刷装置11的局部透视立体图。图3是本实施方式的印刷装置11的透视侧视图。
89.印刷装置11具备印刷部13和掩模更换器15。
90.印刷部13使用掩模27向作为印刷对象物的基板kb(参照图2)的上表面印刷焊料膏剂pst(参照图2)。掩模27也可以改读作丝网掩模或金属掩模。印刷部13具有覆盖该印刷部13的印刷部罩17、以及基板输送保持部21。基板输送保持部21输送基板kb,并且在印刷位置保持基板kb。
91.掩模更换器15与印刷部13的后部相邻设置,并将印刷部13中使用的掩模27从存储仓25向印刷部13送入,或者将印刷部13中使用过的掩模27从印刷部13向存储仓25送出。需要说明的是,关于掩模更换器15的详细情况,见后述。
92.在掩模更换器15的壳体23的后表面侧的上部可以设置有在例如印刷部13中发生了某些错误等情况下使警报音产生的报送部。报送部可以是具备例如led等的触摸面板31。但是,报送部不限定于此,也可以是在例如印刷装置11的印刷部罩17或壳体23上设置的灯这样的其他报告机构。
93.接着,参照图2及图3,来说明印刷装置11的内部构造。
94.印刷部13中,在基板输送保持部21的上方设置有掩模引导件33。印刷部13中,在掩模引导件33的上方配置有掩模保持部35。在掩模保持部35的上方设置有印刷头37、刮刀单元39、掩模上表面清洁器41及气体吹送部43。在此基础上,在掩模保持部35的上方还设置有沿着左右(x轴方向)配置的两个掩模保持部升降工作缸45的各自、及前后左右4个掩模保持部按压工作缸47的各自。
95.两个掩模保持部升降工作缸45的各自、及4个掩模保持部按压工作缸47的各自固定设置于在掩模引导件33的左右设置的前后方向引导部(未图示)所具有的垂直部。在此基础上,两个掩模保持部升降工作缸45分别还设置于在掩模保持部35沿y轴方向延伸的左右两个直线部分的中间部的上方。在此基础上,4个掩模保持部按压工作缸47分别还设置于掩模保持部35的四角或其附近的上方。
96.在掩模保持部35的下方设置有掩模移动机构49及相机51、以及掩模下表面清洁器53。
97.气体吹送部43作为在掩模27因印刷工序的执行而被糊剂pst弄脏之前将掩模27的上表面清洁的掩模清洁器发挥功能。作为掩模27被糊剂pst弄脏之前的例子,可举出掩模27的使用前、或者向掩模27供给最初的糊剂pst之前。气体吹送部43在输送掩模27的掩模引导件33的上方具备沿着相对于掩模27的输送方向(y轴方向)大致正交而交叉的横向(即x轴方向)延伸的管状部55、以及与管状部55的一端侧相连的阀部57。管状部55在两个前后方向引导部(未图示)各自的后端侧跨两个前后方向引导部各自而设置。
98.掩模下表面清洁器53设置为通过掩模下表面清洁器引导件(未图示)而在掩模引导件33的下方的区域沿y轴方向移动自如。掩模下表面清洁器53通过移动基座连结部(未图
示)而与掩模移动机构49的移动基座59连结,与移动基座59成为一体并沿y轴方向移动而清洁掩模27的下表面。掩模下表面清洁器53在不通过移动基座59沿y轴方向移动的情况下,位于掩模输送位置的前方的清洁器待机位置而待机(参照图2)。掩模下表面清洁器53通过在上述的掩模下表面清洁器引导件(未图示)设置的下表面清洁器升降部(未图示)而相对于掩模引导件33(即相对于在输送位置设置的掩模27)升降自如。
99.掩模移动机构49具有使掩模27在掩模更换器15所具备的存储仓25与规定的掩模输送位置之间移动的功能。具体而言,掩模移动机构49将收纳于存储仓25的掩模27抽出并使掩模27移动至印刷部13内的规定的掩模输送位置。另外,掩模移动机构49使位于规定的掩模输送位置的掩模27移动而返回(收纳于)存储仓25内。掩模移动机构49具备沿x轴方向延伸设置的移动基座59、以及通过设置于移动基座59的升降致动器61而升降自如的抽出板63。需要说明的是,掩模移动机构49也可以改读作从存储仓25向印刷部13移送掩模27(送入掩模)、以及从印刷部13向存储仓25移送掩模27(送出掩模)的掩模移送部。
100.《掩模更换器的结构》
101.参照图4及图5来说明掩模更换器15。图4是本实施方式的掩模更换器15中的壳体23的透视立体图。图5是本实施方式的掩模更换器15中的壳体23的透视侧视图。图5的(a)是存储仓25位于作为存储仓供给位置的作业空间sp2的情况下的壳体23的透视立体图。图5的(b)是存储仓25位于作为掩模供给位置的供给空间sp1的情况下的壳体23的透视立体图。
102.掩模更换器15具备壳体23、存储仓25、升降机65及触摸面板31而构成。升降机65是移动部的一例。
103.存储仓25具有在前后方向开口的大致长方体形状。在存储仓25的内部设置有沿上下方向排列的多个货架26。在多个货架26分别将掩模27以水平姿势载置(收纳)。在存储仓25收纳与基板kb的品种相应的多种(多片)不同的掩模27的各自。这样,存储仓25成为能够将掩模27收纳为沿y轴方向插拔自如的结构。
104.掩模更换器15具有用于供作业者进行掩模27的供给作业的开口部29。掩模更换器15中的壳体23的内部空间sp如图2及图3所示那样,上方空间成为供给空间sp1,下方空间成为作业空间sp2。
105.供给空间sp1是在将收纳于存储仓25的掩模27经由掩模通过开口71向印刷部13供给的情况下存储仓25所位于的空间。作业空间sp2是在作业者供给存储仓25或收纳于存储仓25的1片以上的掩模27的情况下存储仓25所位于的空间。
106.在壳体23中的可访问作业空间sp2的位置形成有开口部29。另外,在壳体23的前表面侧设置有掩模通过开口71。掩模通过开口71设置为供给空间sp1与印刷部13的内部(即,印刷部罩17的内部)连通。另外,掩模通过开口71具有掩模27能够沿前后方向通过的大小。
107.图3所示的掩模移动机构49将收纳于存储仓25的任意货架26(参照图6及图7)的要向印刷部13送入的掩模27(称作送入掩模)从掩模通过开口71向前方抽出并输送至规定的掩模输送位置。另外,掩模移动机构49使输送到掩模输送位置的掩模27(称作送出掩模)从掩模通过开口71收纳于(返回)存储仓25(详细而言,是存储仓25的任意货架26)。
108.升降机65构成为包括:形成为大致矩形形状并从下方支承存储仓25的底面的升降体73;沿x轴方向延伸并支承升降体73的升降体支承部75;设置于升降体支承部75的一端侧的螺母部77;螺合于螺母部77并沿上下方向延伸的滚珠丝杠79;以及驱动滚珠丝杠79旋转
的升降体升降马达81。
109.升降机65中,通过升降体升降马达81的工作而滚珠丝杠79沿规定的方向旋转,与螺母部77连结而一体构成的升降体支承部75通过该旋转来升降。由此,升降机65使连结于升降体支承部75的升降体73和升降体73所支承的存储仓25在供给空间sp1与作业空间sp2之间升降。即,升降机65作为使由作业者从壳体23的开口部29送入了的存储仓25在设置有壳体23的开口部29的作业空间sp2和与该开口部29分离开的供给空间sp1之间进行移动的存储仓25的移动(升降)机构发挥功能。即,升降机65能够使存储仓25在存储仓供给位置mgsp与任意的掩模供给位置mssp1之间移动(升降)。
110.升降体73根据升降体升降马达81的工作方向(即,滚珠丝杠79的旋转方向)而上升或下降。在升降体73处于壳体23内的作业空间sp2的下降限度位置(即,图5的(a)所示的存储仓供给位置)的情况下,作业者能够从开口部29将存储仓25放入壳体23内而载置于升降体73的上表面。另外,在升降体73处于下降限度位置的情况下,作业者能够将载置于升降体73的存储仓25从开口部29取出。
111.升降机65使升降体升降马达81驱动,使装载了在存储仓供给位置放置的存储仓25的升降体73上升。此时,升降机65调整升降体73的移动量,以成为送入掩模能够从掩模通过开口71取出的规定的作业高度hs。规定的作业高度hs可以是掩模移动机构49能够经由掩模通过开口71将收纳于存储仓25的送入掩模取出的高度。图5的(b)表示送入掩模位于规定的作业高度hs的状态。需要说明的是,规定的作业高度hs的位置可以与掩模供给位置mssp1相等。
112.《编码读取器、光学传感器及二维码》
113.参照图6及图7,来说明编码读取器87、光学传感器85及二维码86的位置。图6是表示本实施方式的编码读取器87及光学传感器85的位置的局部透视立体图。图7是表示本实施方式的掩模27中的二维码86的位置的图。
114.如图6所示,光学传感器85设置于印刷部13中的能够对收纳于存储仓25的掩模27的印刷部13侧的侧面照射光的位置。例如,光学传感器85设置于在使搭载了存储仓25的升降体73为最下降的状态(例如下降限度位置)下,能够对收纳于存储仓25的最上层的货架26的掩模27的印刷部13侧的侧面照射光的位置。光学传感器85通过照射光并检测有无其反射光,来检测存储仓25的各货架26是否收纳有掩模27。
115.如图6所示,编码读取器87设置于印刷部13中的能够对收纳于存储仓25的掩模27的印刷部13侧的侧面进行拍摄的位置。例如,编码读取器87设置于在使搭载了存储仓25的升降体73为最下降的状态下,能够对收纳于存储仓25的最上层的货架26的掩模27的印刷部13侧的侧面进行拍摄的位置。即,编码读取器87与光学传感器85可以设置于大致相同的高度的位置。
116.如图7所示,在掩模27的印刷部13侧的侧面、且是在收纳于货架26的状态下的掩模27的x轴方向上与图6所示的编码读取器87对置的位置,赋予二维码86。作为二维码86的例子,可举出qr码(注册商标)。在该情况下,编码读取器87可以是qr码读取器。需要说明的是,也可以代替二维码86而对掩模27赋予条形码,也可以对掩模27赋予能够唯一识别的数字或文字的列。二维码或条形码可以通过将印刷有编码的粘合带等贴附于掩模27的侧面而固定贴合于掩模27。或者,二维码或条形码可以通过将印刷有编码的磁体片贴附于掩模27的侧
面而固定贴合于掩模27。
117.由此,通过使搭载了存储仓25的升降体73从最下降的状态上升,光学传感器85能够检测存储仓25的各货架26上的掩模27的有无,编码读取器87能够读取收纳于存储仓25的各货架26的掩模27的二维码96。需要说明的是,编码读取器87也可以改读作能够读取以二维码86为代表的编码的读取部。
118.二维码86可以按每个掩模27而不同。控制部93可以预先保持表示二维码86与掩模27的种类之间的对应关系的信息。由此,通过由编码读取器87读取掩模27的二维码86,控制部93能够识别该掩模27的种类。
119.《控制部的结构》
120.接着,参照图8,来说明本实施方式的印刷装置11的控制部93。图8是表示本实施方式的印刷装置11的控制部93的框图。
121.印刷装置11所具备的控制部93包括基板输送保持控制部95、掩模输送设置控制部97、印刷动作控制部99、拍摄控制部101、掩模识别部102及升降机控制部105而构成。
122.控制部93使用例如cpu(central processing unit)或fpga(field programmable gate array)而构成,与印刷部13所具备的存储器(未图示)协同配合来进行各种处理及控制。具体而言,控制部93通过参照保持于存储器的程序及数据,执行该程序,来实现各部分的功能。
123.基板输送保持控制部95将基板kb输送至规定的基板输送位置,并由基板输送保持部21保持所输送的基板kb。另外,基板输送保持控制部95在基于由相机51拍摄的基板kb的拍摄图像而判定为在规定的基板输送位置保持的基板kb相对于掩模27的掩模输送位置存在错位的情况下,进行所保持的基板kb的对位。
124.掩模输送设置控制部97控制掩模移动机构49而取出收纳于存储仓25的掩模27(送入掩模),并保持掩模27将其输送至规定的掩模输送位置。详细而言,掩模输送设置控制部97执行由移动基座驱动马达107进行的移动基座59的沿y轴方向的移动控制、由升降致动器61进行的抽出板63的升降控制、由张力赋予工作缸(未图示)对处于掩模设置位置的掩模27进行的张力赋予控制等。
125.印刷动作控制部99使印刷头37驱动,来执行糊剂pst向与掩模27的下表面接触的基板kb印刷的印刷动作控制。详细而言,印刷动作控制部99执行由刮板基座驱动马达109进行的刮板基座(未图示)的沿y轴方向的移动控制、以及由刮板升降驱动部111进行的刮板的升降控制。
126.拍摄控制部101执行用于由相机51分别拍摄由基板输送保持部21在规定的基板输送位置保持的基板kb的上表面、以及设置于掩模输送位置的掩模27的下表面的控制。详细而言,拍摄控制部101执行由移动基座驱动马达107进行的移动基座59的沿y轴方向的移动控制、沿着移动基座59进行的相机51的沿x轴方向的移动控制、位于相机51所具备的下方拍摄相机(未图示)的下方的区域的对基板kb的上表面的拍摄控制、以及位于相机51所具备的上方拍摄相机(未图示)的上方的区域的对掩模27的下表面的拍摄控制。
127.掩模识别部102控制光学传感器85及编码读取器87,识别存储仓25的各货架26中的掩模27的有无及掩模27的种类,并生成存储仓内掩模信息103。需要说明的是,关于存储仓内掩模信息103的详细情况,见后述(参照图9)。
128.升降机控制部105使升降体升降马达81驱动,来控制由升降机65进行的存储仓25的升降。
129.作为报告机构的一例的触摸面板31与控制部93之间电连接。触摸面板31是由例如lcd(liquid crystal display)或有机el(electroluminescence)等显示装置和输入装置构成的用户接口。
130.触摸面板31能够接受由作业者进行的输入操作,并将输入操作变换为电信号而向印刷装置11中的控制部93输出。
131.接着,说明印刷装置11中的掩模的供给动作步骤例。作业者进行将事先收纳有丝网印刷所需的1片以上的掩模27的存储仓25向掩模更换器15的作业空间sp2的升降体73上载置的存储仓供给作业。
132.控制部93当在存储仓供给作业完成后由作业者关闭外罩时,通过升降机控制部105使升降机65驱动,通过掩模识别部102生成与存储仓25对应的存储仓内掩模信息103。需要说明的是,关于存储仓内掩模信息103的生成处理的详细情况,见后述(参照图11)。
133.控制部93使存储仓25上升,以使收纳有送入掩模27的货架26的高度成为与掩模通过开口71对应的规定的作业高度hs。
134.控制部93在存储仓25的上升控制后,使掩模移动机构49驱动,经由掩模通过开口71取出送入掩模并输送至规定的掩模输送位置。具体而言,控制部93通过掩模输送设置控制部97使移动基座驱动马达107驱动,使移动基座59向后方(掩模更换器15侧)移动。
135.控制部93使在安装于移动基座59的抽出板63的上表面沿x轴方向排列设置的两个掩模移动用卡合突起(未图示)与在收纳于存储仓25的送入掩模27的前缘侧设置的两个卡合孔(未图示)卡合。
136.控制部93在两个掩模移动用卡合突起与两个卡合孔卡合了的状态下,使移动基座驱动马达107驱动,从存储仓25内通过掩模通过开口71将送入掩模27向印刷部13的内部抽出,使送入掩模27移动,直至送入掩模27位于前方处的规定的掩模输送位置。由此,控制部93能够从存储仓25内取出送入掩模27,并输送至规定的掩模输送位置。
137.需要说明的是,由移动基座59输送中的送入掩模27的左右的两边由沿着前后方向设置的一对引导部的台阶(引导件)引导,因此被笔直向前方方向抽出。
138.《存储仓内掩模信息》
139.参照图9,来说明存储仓内掩模信息103。图9是表示本实施方式的存储仓内掩模信息103的一例的图。
140.存储仓内掩模信息103包括与放置于掩模更换器15的存储仓25内的各货架26中收纳的掩模27相关的信息。
141.存储仓内掩模信息103作为项目而具有货架26的编号、表示该货架26是否收纳有掩模27的掩模有无、表示收纳于该货架26的掩模的种类的掩模种类。需要说明的是,在本实施方式中,说明了货架26的编号从上数依次为1、2、3、
…
的情况,但货架26的编号不限定于此,例如也可以是从下数依次为1、2、3、
…
。
142.图9所示的存储仓内掩模信息103的第1行表示第1号货架26(货架“1”)收纳有掩模27(掩模有无“有”),该掩模27的种类为“掩模a”(掩模种类“掩模a”)。图9所示的存储仓内掩模信息103的第2行表示第2号货架26(货架“2”)未收纳掩模27(掩模有无“无”)。
143.《第一模式及第二模式》
144.参照图10,来说明本实施方式的第一模式及第二模式。图10是用于说明本实施方式的led按钮19与第一模式及第二模式之间的关系的图。
145.如图10所示,在用于将掩模更换器15的存储仓25送入及送出的开口部29的旁侧设置有与存储仓25的货架26一一对应的led按钮19。例如,在存储仓25的货架26的数量为10的情况下,设置有10个led按钮19。
146.led按钮19通过点亮、熄灭、闪烁,来表示对应的货架26的状态。控制部93具有第一模式和第二模式,led按钮19的显示方式可以根据第一模式和第二模式而不同。需要说明的是,led按钮19也可以改读作发光部。
147.第一模式如图10的(a)所示那样是将存储仓25的各货架26全部使用于未使用掩模27的送入及使用完毕掩模27的送出这双方的模式。
148.在第一模式中,led按钮19可以示出接下来的(a1)至(a3)的状态。
149.(a1)点亮着的led按钮19表示与该led按钮19对应的货架26未收纳掩模27。由此,作业者能够识别出“能够在与点亮着的led按钮19对应的货架26放置掩模27”这一情况。
150.(a2)熄灭着的led按钮19表示与该led按钮19对应的货架26收纳有未使用掩模。由此,作业者能够识别出“不必对与熄灭着的led按钮19对应的货架26做什么”这一情况。
151.(a3)闪烁着的led按钮19表示与该led按钮19对应的货架26收纳有使用完毕掩模27或收纳有二维码86的读取失败的掩模27。由此,作业者识别出“需要将与闪烁着的led按钮19对应的货架26的掩模27取出”这一情况。需要说明的是,作业者在取出掩模27后,按下闪烁着的led按钮19。被按下的led按钮19从闪烁变化为点亮。由此,能够使控制部93识别“取出了掩模27”这一情况。
152.第二模式如图10的(b)所示那样是将存储仓25的货架26分为用于将未使用掩模27送入的未使用区域88与用于将使用完毕掩模27送出的使用完毕区域89而使用的模式。例如,使从上数第1层至第6层为未使用区域88,使从第7层至第10层为使用完毕区域89。在该情况下,印刷部13将使用完毕掩模27向使用完毕区域89的任意货架26送出,不向未使用区域88的货架26送出。
153.在第二模式的未使用区域88中,led按钮19的点亮及熄灭可以与上述的第一模式的情况同样。
154.在第二模式的使用完毕区域89中,led按钮19可以示出接下来的(b1)至(b2)的状态。
155.(b1)熄灭着的led按钮19表示与该led按钮19对应的货架26未收纳使用完毕掩模27。由此,作业者能够识别出“不必对与熄灭着的led按钮19对应的货架26做什么”这一情况。
156.(b2)闪烁着的led按钮19表示与该led按钮19对应的货架26收纳有使用完毕掩模27。由此,作业者识别“需要将与闪烁着的led按钮19对应的货架26的使用完毕掩模27取出”这一情况。
157.需要说明的是,控制部93也可以在触摸面板31等显示从作业者接受第一模式与第二模式之间的切换的操作图像。另外,控制部93也可以在触摸面板31等显示接受第二模式中的作为未使用区域88或使用完毕区域89使用的货架26的层数的操作画面。
158.另外,上述的led按钮19的点亮、闪烁、熄灭所示的货架26的状态是一例,led按钮19的点亮、闪烁、熄灭也可以定为表示与上述不同的货架26的状态。
159.《第一模式的处理流程》
160.参照图11,来说明第一模式的情况下的掩模识别部102的处理。图11是表示本实施方式的第一模式的情况下的掩模识别部102的处理的流程图。需要说明的是,掩模识别部102的处理也可以改读作控制部93的处理。
161.掩模识别部102使升降体73移动到初始位置(例如下降限度位置)(s11)。
162.掩模识别部102向变量n代入1(s12)。
163.掩模识别部102控制光学传感器85,感测第n号货架26的掩模27的有无(s13)。
164.掩模识别部102基于光学传感器85的检测结果,来判定第n号货架26是否存在掩模27(s14)。
165.在第n号货架26没有掩模27的情况下(s14:否),掩模识别部102使与第n号货架26对应的led按钮19点亮,对存储仓内掩模信息103的货架n的掩模有无的项目设置“无”(s15)。然后,掩模识别部102使处理进入步骤s22。
166.在第n号货架26存在掩模27的情况下(s14:是),掩模识别部102控制编码读取器87,读取对第n号货架26的掩模27赋予的二维码86(s16)。
167.掩模识别部102判定二维码86的读取是否成功了(s17)。
168.在二维码86的读取失败了的情况下(s17:否),掩模识别部102使与第n号货架26对应的led按钮19闪烁(s18),并使处理进入步骤s22。
169.在二维码86的读取成功了的情况下(s17:是),掩模识别部102判定第n号货架26的掩模27是否未使用(s19)。例如,掩模识别部102将从未送入印刷部13的掩模27判定为未使用,并将从印刷部13送出来的掩模27判定为使用完毕。
170.在第n号货架26的掩模27使用完毕的情况下(s19:否),掩模识别部102使与第n号货架26对应的led按钮19闪烁(s18),并使处理进入步骤s22。
171.在第n号货架26的掩模27未使用的情况下(s19:是),掩模识别部102在存储仓内掩模信息103中,对货架n的掩模有无的项目设置“有”,对货架n的掩模类别的项目设置二维码86所示的掩模类别(s20)。表示二维码86与掩模类别之间的对应关系的信息可以预先保存于控制部93的规定的存储器。
172.掩模识别部102使与第n号货架26对应的led按钮19熄灭(s21)。
173.作为步骤s22,掩模识别部102判定是否关于存储仓25内的全部的货架26完成了处理(s22)。
174.在还残留存未处理的货架26的情况下(s22:否),掩模识别部102对变量n加1,并使升降体73上升1个货架26的量(s23)。然后,掩模识别部102使处理返回步骤s13。
175.在关于全部的货架26完成了处理的情况下(s22:是),掩模识别部102结束本处理。
176.通过上述的处理,表示存储仓25内的各货架26中的掩模27的有无及掩模类别的信息设置于存储仓内掩模信息103。印刷部13参照存储仓内掩模信息103的掩模类别,能够识别出“存储仓25哪个货架26收纳有哪个掩模类别的掩模27”。因而,即使作业者在存储仓25任意货架26收纳了任意掩模类别的掩模27,印刷部13也能够参照存储仓内掩模信息103,从存储仓25自动地抽出使用于印刷的掩模类别的掩模27。在如以往那样指示作业者应该在存
储仓25哪个货架26收纳哪个掩模类别的掩模27的情况下,可能发生由作业者引起的掩模27的收纳失误,根据本实施方式,由于不会发生这样的失误,因此作业效率提高。
177.另外,作业者观察与各货架26对应的led按钮19的状态,能够从印刷装置11外识别存储仓25的各货架26中的掩模27的有无。
178.另外,与收纳有二维码86读取失败了的掩模27或使用完毕掩模27的货架26对应的led按钮19闪烁,因此作业者能够一眼识别出“将led按钮19闪烁着的货架26的掩模27取出即可”这一情况。需要说明的是,作业者在取出了掩模27的情况下,按下与取出了该掩模27的货架26对应的led按钮19。由此,控制部93能够识别出由作业者取出了掩模27的货架26。在该情况下,掩模识别部102可以将存储仓内掩模信息103中的与取出了该掩模27的货架26对应的掩模有无变更为“无”,并将掩模类别变更为“n/a”。
179.另外,与未收纳掩模27的货架26对应的led按钮19点亮,因此作业者能够一眼确认到“led按钮19点亮着的货架26能够放置掩模27”这一情况。另外,与收纳有未使用掩模27的货架26对应的led按钮19熄灭,因此作业者能够一眼确认到“不必取出led按钮19熄灭着的货架26的掩模27”这一情况。
180.《第二模式的处理流程》
181.参照图12,来说明第二模式的情况下的掩模识别部102的处理。图12是表示本实施方式的第二模式中的掩模识别部102的处理的流程图。
182.掩模识别部102使升降体73移动到初始位置(例如下降限度位置)(s31)。
183.掩模识别部102向变量n代入1(s32)。
184.掩模识别部102判定第n号货架26是否属于未使用区域88(s33)。
185.在第n号货架26属于未使用区域88的情况下(s33:是),掩模识别部102执行图11所示的步骤s13~s21的处理(s34),并使处理进入步骤s39。
186.在第n号货架26属于使用完毕区域89的情况下(s33:否),掩模识别部102执行接下来的处理。
187.掩模识别部102控制光学传感器85,来感测第n号货架26的掩模27的有无(s35)。
188.掩模识别部102基于光学传感器85的检测结果,来判定第n号货架26是否存在掩模27(s36)。
189.在第n号货架26存在掩模27的情况下(s36:是),掩模识别部102使与第n号货架26对应的led按钮19闪烁(s37),并使处理进入步骤s39。
190.在第n号货架26没有掩模27的情况下(s36:否),掩模识别部102使与第n号货架26对应的led按钮19熄灭(s38),并使处理进入步骤s39。
191.作为步骤s39,掩模识别部102判定是否关于存储仓25内的全部的货架26完成了处理(s39)。
192.在还残留有未处理的货架26的情况下(s39:否),掩模识别部102对变量n加1,并使升降体73上升1个货架26的量(s40)。然后,掩模识别部102使处理返回步骤s33。
193.在关于全部的货架26完成了处理的情况下(s39:是),掩模识别部102结束本处理。
194.由此,在使用完毕区域89中,与收纳有使用完毕掩模27的货架26对应的led按钮19闪烁,与未收纳使用完毕掩模27的货架26对应的led按钮19熄灭。因而,作业者能够一眼识别出“从与闪烁着的led按钮19对应的货架26将使用完毕掩模27取出即可”这一情况。需要
说明的是,作业者在取出了使用完毕掩模27的情况下,按下与取出了该使用完毕掩模27的货架26对应的led按钮19。由此,控制部93能够由作业者识别到取出了使用完毕掩模27的货架26。在该情况下,掩模识别部102可以将存储仓内掩模信息103中的与取出了该使用完毕掩模27的货架26对应的掩模有无变更为“无”,并将掩模类别变更为“n/a”。
195.(本公开的汇总)
196.本公开的内容能够如以下这样表现。
197.《表现1》
198.本公开的一方案的印刷装置11具备:印刷部13,其使用形成有规定的印刷图案的掩模27向基板kb印刷焊料膏剂;读取部(例如编码读取器87),其能够读取对收纳于存储仓25的货架26的掩模27赋予的编码(例如二维码86),所述存储仓25具有能够收纳掩模27的多个货架26;以及控制部93,其将读取了编码的货架26的位置与所读取的编码所示的信息建立对应关系而生成存储仓内掩模信息103。
199.由此,控制部93参照存储仓内掩模信息103,能够识别与存储仓25的各货架26中的掩模27相关的信息。
200.《表现2》
201.在表现1中,可以是,印刷装置11还具备:掩模移送部(例如掩模移动机构49),其从存储仓25向印刷部13移送掩模27;以及升降部(例如升降体73),其载置存储仓25,并使存储仓25升降到掩模移送部能够将移送对象的掩模27从存储仓25抽出的位置,控制部93使升降部升降而通过读取部来读取对收纳于存储仓25的各货架26的掩模27赋予的编码。
202.由此,控制部93能够不新设置读取部的移动机构而活用存储仓25的升降部,使读取部读取收纳于存储仓25的各货架26的掩模27的编码。
203.《表现3》
204.在表现2中,可以是,编码所示的信息是表示掩模27的种类的信息,控制部93基于存储仓内掩模信息103,来确定存储仓25中的收纳有要在印刷部13中使用于印刷的种类的掩模27的货架26,控制部93使升降部升降到掩模移送部能够将所确定的货架26的掩模27抽出的位置。
205.由此,控制部93能够参照存储仓内掩模信息103,控制掩模移送部,将使用于印刷的掩模类别的掩模27从存储仓25自动地抽出。因而,与以往那样指示作业者应该在存储仓25哪个货架26收纳哪个掩模类别的掩模27的情况相比,不发生作业者的收纳失误,因此作业效率提高。
206.《表现4》
207.在表现1中,可以是,印刷装置11还具备与存储仓25的各货架26对应的发光部(例如led按钮19),控制部93根据货架26中的掩模27的有无,来控制与货架26对应的发光部的发光。
208.由此,作业者能够根据发光部的发光,从印刷装置11外识别出与该发光部对应的货架26中的掩模27的有无。
209.《表现5》
210.在表现4中,可以是,控制部93使与未收纳掩模27的货架26对应的发光部点亮,控制部93使与收纳有编码的读取成功了的掩模27的货架26对应的发光部熄灭。
211.由此,作业者能够从印刷装置11外识别出“与点亮着的发光部对应的货架26未收纳掩模27,与熄灭着的发光部对应的货架26收纳有编码的读取成功了的掩模27”这一情况。
212.《表现6》
213.在表现5中,可以是,控制部93使与收纳有使用于印刷之后的掩模27的货架26对应的发光部闪烁。
214.由此,作业者能够从印刷装置11外识别出“与闪烁着的发光部对应的货架26收纳有使用于印刷之后的掩模27”这一情况。
215.《表现7》
216.在表现5或6中,可以是,控制部93使与收纳有编码的读取失败了的掩模27的货架26对应的发光部闪烁。
217.由此,作业者能够从印刷装置11外识别到“与闪烁着的发光部对应的货架26收纳有编码的读取失败了的掩模27”这一情况。
218.《表现8》
219.在表现4中,可以是,存储仓25的多个货架26被分割为收纳使用于印刷之前的掩模27的未使用区域88、以及收容使用于印刷之后的掩模27的使用完毕区域89,控制部93在未使用区域88中,使与未收纳掩模27的货架26对应的发光部点亮,使与收纳有编码的读取成功了的掩模27的货架26对应的发光部熄灭。
220.由此,作业者能够从印刷装置11外识别出“在未使用区域88中,与点亮着的发光部对应的货架26未收纳未使用掩模27,在与熄灭着的发光部对应的货架26收纳有编码的读取成功了的未使用掩模27”这一情况。
221.《表现9》
222.在表现8中,可以是,控制部93在使用完毕区域89中,使与未收纳掩模27的货架26对应的发光部熄灭,并使与收纳有掩模27的货架26对应的发光部闪烁。
223.由此,作业者能够从印刷装置11外识别出“在使用完毕区域89中,与熄灭着的发光部对应的货架26未收纳使用完毕掩模27,与闪烁着的发光部对应的货架26收纳有使用完毕掩模27”这一情况。
224.以上,参照附图说明了实施方式,但本公开不限定于该例。显然本领域技术人员在技术方案的范围所记载的范畴内能够想到各种变更例、修正例、置换例、附加例、删除例、等同例,能够知晓这些也属于本公开的技术范围。另外,也可以在不脱离发明的主旨的范围内将上述的实施方式中的各构成要素任意组合。
225.【产业上的可利用性】
226.本公开的技术在能够使用多个掩模的印刷装置中有用。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。