1.本实用新型涉及汽车转向系统技术领域,具体涉及一种基于双绕组直线电机的助力转向系统。
背景技术:
2.汽车转向系统的性能直接影响到汽车的操纵稳定性,它对于确保车辆的安全行驶、改善驾驶员的工作强度起着重要的作用。为了减轻驾驶员的劳动强度,目前普遍采用了辅助转向系统:液压助力转向系统、电动助力转向系统、线控助力转向系统等。
3.其中,液压助力转向系统一般是由发动机驱动转向油泵提供液压油,由转向控制阀来控制液压油实现助力转向。但液压助力系统经常出现液压油泄漏的现象,对环境污染较大。线控助力转向系统中方向盘与转向轮之间完全依靠电力电子器件来工作,较难保证系统的安全性与可靠性。
4.汽车电动助力转向系统一般采用的方法是旋转电机驱动,通过连接的齿轮、齿条或蜗轮、蜗杆或滚珠丝杠结构进行牵引。这种驱动方式必然会有将旋转运动转变为直线运动的过程,传动环节繁多且结构复杂,容易磨损和产生故障,且传动效率较低。
技术实现要素:
5.本实用新型要解决的技术问题是克服现有技术的不足,提供一种结构简单,可靠性好,效率高的基于双绕组直线电机的助力转向系统。
6.为解决上述技术问题,本实用新型采用如下技术方案:
7.一种基于双绕组直线电机的助力转向系统,包括连接轴及车轮,还包括双绕组直线电机,所述连接轴两端均连接有转向节,所述车轮安装在对应的转向节上,所述转向节连接有转向臂,所述转向臂另一端与转向拉杆铰接,两所述转向拉杆分别与双绕组直线电机两端连接。
8.作为上述技术方案的进一步改进:
9.所述双绕组直线电机包括定子和动子,所述定子包括定子铁芯及绕设在定子铁芯上的两组定子绕组,所述动子包括背铁及设于背铁上的永磁体,所述定子与动子相对布置,两组所述转向拉杆分别与动子的两端连接。
10.基于双绕组直线电机的助力转向系统还包括电机控制器,所述双绕组直线电机还包括用于定位动子的位置传感器,所述位置传感器与电机控制器连接,所述电机控制器与动子连接。
11.所述电机控制器包括两组位置控制器、两组速度控制器及两组转矩控制器,所述位置控制器、速度控制器及转矩控制器均与动子连接。
12.基于双绕组直线电机的助力转向系统还包括逆变器,两组所述定子绕组均与逆变器连接。
13.所述定子铁芯由硅钢片叠压形成。
14.两组所述定子绕组的电角度相差30
°
。
15.两组所述定子绕组的中性点相互独立。
16.所述定子绕组为三相双层集中绕组。
17.基于双绕组直线电机的助力转向系统还包括双三相变流器、直流滤波器、整流器及两组并联的三相供电电路,两组所述三相供电电路与两组定子绕组一一对应连接,所述双三相变流器、直流滤波器、整流器设于三相供电电路靠近电源的一侧。
18.与现有技术相比,本实用新型的有益效果在于:
19.本实用新型公开的基于双绕组直线电机的助力转向系统,双绕组直线电机驱动转向拉杆做直线运动,带动转向臂摆动,进而带动转向节摆动,实现车轮的转向,相较于旋转电机来说,无需齿轮齿条、蜗轮蜗杆等中间传动环节,减少了传动误差、延时效应和零件数目,降低了生产成本,提高了转向系统的控制精度、运行效率及可靠性;双绕组直线电机的加速度能够达到2-10g(g=9.8m/s),使得转向系统能够实现较快的加减速,减少了响应时间,提高了动态响应速度,从而有效提升了汽车的操纵性能。
附图说明
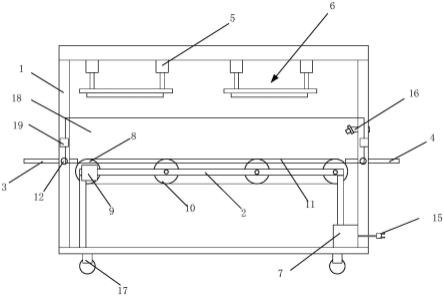
20.图1为本实用新型基于双绕组直线电机的助力转向系统的结构示意图。
21.图2为本实用新型中位置控制器、速度控制器及转矩控制器的结构示意图。
22.图3为本实用新型中双绕组直线电机的结构示意图。
23.图中各标号表示:1、连接轴;2、车轮;3、双绕组直线电机;31、定子;311、定子铁芯;312、定子绕组;32、动子;321、背铁;322、永磁体;33、位置传感器;4、转向节;5、转向臂;6、转向拉杆;7、电机控制器;71、位置控制器;72、速度控制器;73、转矩控制器;8、逆变器;9、双三相变流器;10、直流滤波器;11、整流器;12、三相供电电路。
具体实施方式
24.以下结合说明书附图和具体实施例对本实用新型作进一步详细说明。
25.如本公开和权利要求书中所示,除非上下文明确提示例外情形,本公开中使用的“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。
26.图1至图3示出了本实用新型的一种实施例,如图1和图2所示,本实施例的基于双绕组直线电机的助力转向系统,包括连接轴1及车轮2,还包括双绕组直线电机3,连接轴1两端均连接有转向节4,车轮2安装在对应的转向节4上,转向节4连接有转向臂5,转向臂5另一端与转向拉杆6铰接,两转向拉杆6分别与双绕组直线电机3两端连接。
27.该基于双绕组直线电机的助力转向系统,双绕组直线电机3驱动转向拉杆6做直线运动,带动转向臂5摆动,进而带动转向节4摆动,实现车轮2的转向,相较于旋转电机来说,无需齿轮齿条、蜗轮蜗杆等中间传动环节,减少了传动误差、延时效应和零件数目,降低了生产成本,提高了转向系统的控制精度、运行效率及可靠性;双绕组直线电机3的加速度能够达到2-10g(g=9.8m/s),使得转向系统能够实现较快的加减速,减少了响应时间,提高了
动态响应速度,从而有效提升了汽车的操纵性能。
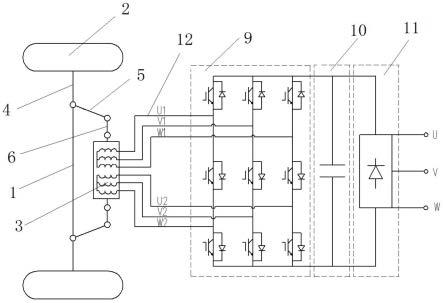
28.本实施例中,双绕组直线电机3包括定子31和动子32,定子31包括定子铁芯311及绕设在定子铁芯311上的两组定子绕组312,动子32包括背铁321及设于背铁321上的永磁体322,定子31与动子32相对布置,两组转向拉杆6分别与动子32的两端连接。定子31通电后,定子31和动子32的气隙之间产生行波磁场,使得动子32做直线运动,动子32带动两个转向拉杆6同时做直线运动,带动对应的转向臂5和转向节4摆动,从而带动两个车轮2同时转向。
29.本实施例中,双绕组直线电机的助力转向系统还包括电机控制器7,双绕组直线电机3还包括用于定位动子32的位置传感器33,位置传感器33与电机控制器7连接,所述电机控制器7与动子32连接。位置传感器33用于定位动子32的位置,并将位置信息发送给电机控制器7,电机控制器7再控制动子32的运动。需要说明的是,此种控制方式为现有控制方式。
30.本实施例中,电机控制器7包括两组位置控制器71、两组速度控制器72及两组转矩控制器73,位置控制器71、速度控制器72及转矩控制器73均与动子32连接。根据位置传感器33检测到的位置信号,通过两组位置控制器71、两组速度控制器72及两组转矩控制器73对动子32的位置、速度和转矩进行冗余控制,即当一组位置控制器71、速度控制器72及转矩控制器73发生故障后,另一组位置控制器71、速度控制器72及转矩控制器73仍然能够正常控制动子32完成转向动作,提高了系统的可靠性。需要说明的是,电机控制器7及冗余控制的方法均为现有的控制器及控制方法。
31.本实施例中,还包括逆变器8,两组定子绕组312均与逆变器8连接。两组定子绕组312采用逆变器8进行解耦控制,使得两组定子绕组312之间的输出不会互相影响,进一步提高了可靠性。需要说明的是,采用逆变器解耦控制为现有控制方法。
32.本实施例中,定子铁芯311由硅钢片叠压形成,磁滞损耗小,不容易发热。
33.本实施例中,两组定子绕组312的电角度相差30
°
,两组定子绕组312的中性点相互独立。
34.本实施例中,定子绕组312为三相双层集中绕组,材料利用率高,体积小,减轻了双绕组直线电机3的重量。
35.本实施例中,还包括双三相变流器9、直流滤波器10、整流器11及两组并联的三相供电电路12,两组三相供电电路12与两组定子绕组312一一对应连接,双三相变流器9、直流滤波器10、整流器11设于三相供电电路12靠近电源的一侧。两组三相供电电路12为两组定子绕组312进行供电,使得定子31和动子32的气隙之间产生行波磁场,驱动动子32作直线运动,完成转向。
36.虽然本实用新型已以较佳实施例揭露如上,然而并非用以限定本实用新型。任何熟悉本领域的技术人员,在不脱离本实用新型技术方案范围的情况下,都可利用上述揭示的技术内容对本实用新型技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本实用新型技术方案的内容,依据本实用新型技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本实用新型技术方案保护的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。