1.本发明涉及洗车机器人洗车测距技术领域,尤其涉及一种洗车机器人恒距行走装置。
背景技术:
2.随着洗车机器人的日益更新换代,已经涌现出多种智能移动式洗车机器人,洗车机器人可移动至待洗车辆旁边完成清洗工作。
3.申请号为“cn202111233406.0”,名称为“一种智能化自动洗车机器人”的中国专利,该专利的技术方案分别记载了“车机器人本体包括基座、移动机构、锂电池、自动控制模块、第一水箱、第一清洁液贮存箱、喷水管、清洁液喷管、支撑架、第一液泵、第二液泵和热风机;所述锂电池分别与第一液泵、第二液泵和自动控制模块电连接,所述自动控制模块分别与第一液泵、第二液泵和移动机构电连接”“所述自动控制模块用于按照预先规划的路径控制移动机构移动”“使洗车机器人本体移动到待洗车辆旁,绕待洗车辆做环绕运动”。由上述记载与附图相结合可知:该方案中记载的洗车机器人的运动方式实质是通过自动控制模块控制移动机构移动至待洗车辆旁,绕待洗车辆做环绕运动,但是并没有说明如何控制移动机构运动至待洗车辆旁,如何实现环绕运动,并且在清洗过程中如何保持与待洗车辆安全距离,以使汽车机器人不撞到待洗车辆上。
4.综上所述,现有技术存在的问题是:在洗车机器人运动至待洗车辆旁、绕待洗车辆做环绕运动以及清洗过程中,无法保持与待洗车辆的安全距离而避免撞到待洗车辆上。
技术实现要素:
5.为了解决上述在洗车机器人运动至待洗车辆旁、绕待洗车辆做环绕运动以及清洗过程中,无法保持与待洗车辆的安全距离而避免撞到待洗车辆上的问题,本发明提供了一种洗车机器人恒距行走装置,通过主体上的测距排障单元实时检测洗车机人的不同部位与待洗车辆之间的距离,使主体与待洗车辆之间保持安全距离。
6.为了达到上述目的,本发明是通过以下技术方案实现的:一种洗车机器人恒距行走装置,用于在洗车前、洗车过程中实时检测与车体的距离,包括:主体。
7.agv驱动轮,设置在主体的底面上,用于自动带动主体按照预设路径运动。
8.模拟臂,设置在主体的一侧,弯向车体,用于随同主体运动。
9.滑动件,滑动设置在模拟臂上,用于沿着模拟臂滑动。
10.模组,滑动设置在滑动件上,其顶面与滑动件的底面滑动连接。
11.测距排障单元,分别与主体的侧壁、模拟臂的侧壁、滑动件的底面连接,用于检测与车体之间的直线距离、与车顶的距离,并通过预设公式计算出车体的长度,还用于检测主体附近的障碍物,以改变主体环绕车体运动的方向。
12.移动终端,与测距排障单元通讯连接,测距排障单元用于传输测距信息、障碍信息至移动终端,移动终端呈现测距信息和障碍信息。
13.与现有技术相比,本发明具有以下优点:将测距排障单元同时设置在主体、模拟臂、滑动件上,实时检测主体与车体、模拟臂与车体、模拟臂与车顶之间的距离,并通过计算出车体的长度掌握机器人主体相对车体的运动长度,并通过检测主体附近的障碍物的方式控制agv驱动轮绕过车体的曲面部位,进而改变主体的运动方向,达到避免撞到车体的目的。通过将测距信息和障碍信息传输至移动终端后,通过移动终端实时给用户呈现洗车机器人的柱体与待洗车辆之间距离的信息状态,更直观的告知用户待洗车辆处于安全洗车状态,不会发生被主体任意部位碰撞的现象。
14.进一步优选为,测距排障单元包括:第一检测组件,分别设置在主体的侧壁上,在agv驱动轮带动主体运动时,第一检测组件用于检测agv驱动轮所在空间内预设距离内的障碍物、主体与车体之间的距离。
15.第二检测组件,安装在模拟臂的竖臂的上端,当主体与车体平行时,用于实时检测竖臂与车体突出部位之间的距离。
16.第三检测组件,可拆卸连接在模拟臂的弯臂上,用于分别获取前端距离信息和后端距离信息,前端距离信息是表示第三检测组件与车体的最前端部位之间的距离数据信息,后端距离信息是表示第三检测组件与车体的最后端部位之间的距离数据信息,并通过预设公式计算获得车体的前后长度。
17.第四检测组件,活动连接在模拟臂的横臂上,用于检测第一车顶距离和第二车顶距离,第一车顶距离是横臂与车体顶部前端之间的距离,第一车顶距离是横臂与车体顶部后端之间的距离。
18.车顶测距雷达,设置在模组上,与模组的侧壁可拆卸连接,模组相对滑动件滑动时,用于实时检测与车体的顶面之间的距离。
19.运算器,均与第三检测组件数据连接,用于通过预设公式计算车体的长度,得到长度信息,并将长度信息传输至移动终端。
20.采用上述技术方案,以此,第一检测组件起到的作用分别是:通过第一检测组件检测agv驱动轮在环绕车体运动中,判断洗车机器人主体前方是否有障碍物,以引导agv驱动轮绕过车体尾部、头部的曲面部位,在智能清洗车体的过程中避免发生碰撞。车体与竖臂平行或近似平行时,通过第二检测组件检测车体的突出部位与竖臂之间的距离限定车体与机器人主体之间安全距离,进而保证车体突出部位避免被碰撞。在agv驱动轮带动主体从车体改变方向运动前,通过第三检测组件检测的前端距离信息、后端距离信息以及预设公式计算得出车体的长度,以确保主体相对车体平行运动的距离,以正确引导agv驱动轮运动符合车体长度的距离后改变运动方向。当横臂在车体的顶面上运动时,通过第四检测组件检测第一车顶距离和第二车顶距离实现检测横臂与车体顶面的距离,以判断车体顶面的长度,准确掌握车体顶面的长度,为洗车机器人清洗车体顶面做好准备,达到完全清洗车体顶面的目的。在以线扫的方式清洗车体顶面的过程中,通过车顶测距雷达实时检测车体顶面与横臂之间的动态距离,以确保横臂与车体顶面之间处于非接触状态,避免横臂碰撞车体顶面。
21.进一步优选为,第一检测组件包括:
避障雷达,设置在主体的第一侧壁上,与agv驱动轮同侧,用于检测agv驱动轮所在空间内预设距离内的障碍物,得到第一障碍模拟信号、第一障碍信息,并将第一障碍模拟信号传输给agv驱动轮,以使agv驱动轮改变运动方向。用于将第一障碍信息传输至移动终端。
22.位姿雷达,分别安装在主体的第二侧壁、第三侧壁以及第四侧壁上,用于分别检测第二侧壁、第三侧壁以及第四侧壁与主体之间的距离,以限定主体相对于车体的位置和位姿,得到位置位姿信息,并将位置位姿信息传输至移动终端。
23.采用上述技术方案,通过避障雷达向agv驱动轮提供改变运动方向的依据,以使用户移动终端上看到agv驱动轮能够完全绕过障碍物环绕车体的尾部或头部进行运动,并通过位姿雷达传输至移动终端的位置位姿信息是用户时刻掌握洗车机器人相对于车体的位置位姿,为避免车体被碰撞提供直观的依据,给用户带来直观的体验感。
24.进一步优选为,第二侧壁、第三侧壁以及第四侧壁均设置有两个位姿雷达。
25.采用上述技术方案,通过两个位姿雷达可以清楚的确定车体分别与第二侧壁、第三侧壁以及第三侧壁之间的距离,从而确定主体相对于车体的具体位置和姿态,达到避免碰撞车体的目的。
26.进一步优化为,第二检测组件包括:第一测距摄像头,设置在竖臂的一内壁上,当主体与车体平行时,用于检测车体主驾驶一侧突出部分与竖臂之间的距离,得到第一距离信息,并将第一距离信息传输至移动终端。
27.第二测距摄像头,设置在竖臂的另一内壁上,当主体与车体平行时,用于检测车体主驾驶后门的一侧突出部分与竖臂之间的距离,得到第二距离信息,并将第二距离信息传输至移动终端。
28.采用上述技术方案,以此通过在移动终端上直接呈现主体与车体的相对位置状态,为避免主体与车体接触提供参考依据。
29.进一步优化为,第三检测组件包括:车头雷达,设置在弯臂的一内壁上,内嵌于一内壁中,用于测量与车体的头部突出部位之间的距离,得到前端距离信息,并将前端距离信息传输至运算器。
30.车尾雷达,设置在弯臂的另一内壁上,内嵌于另一内壁中,用于获取与车体的尾部突出部位之间的距离,得到后端距离信息,并将后端距离信息传输至运算器,运算器用于按照预设公式计算得出长度信息,并将长度信息传输至移动终端。
31.采用上述技术方案,以此计算得出车体的长度,为机器人主体相对车体平行横向行走提供准确的距离,避免行走过多而远离车体或过少而碰撞车体。
32.进一步优化为,第四检测组件包括:前顶雷达,设置在横臂的一底面上,与一底面可拆卸连接,用于检测车体顶部前端与一底面之间的距离,得到第一车顶距离,并将第一车顶距离传输至移动终端。
33.后顶雷达,安装在横臂的另一底面上,用于检测车体顶部后端与另一底面之间的距离,得到第二车顶距离,并将第二车顶距离传输至移动终端。
34.采用上述技术方案,以此可准确掌握车体顶面的长度,为洗车机器人清洗车体顶面做好准备,实现完全清洗车体顶面的同时,给用户带来直观的洗车体验感。
35.进一步优化为,预设公式为:
其中,r1是车头雷达与车体的头部突出部位之间的距离,r2是车尾雷达与车体的尾部突出部位之间的距离,h1是车头雷达投影在与车体的头部所在虚拟平面的投影距离,h2是车尾雷达投影在车体的尾部所在虚拟平面内的投影距离,l3是车头雷达与车尾雷达之间的距离,l是车体的长度。
36.采用上述技术方案,通过上述预设公式可准确计算出车体的长度,为agv驱动轮带动主体改变运动方向提供准确的距离信息。
37.进一步优化为,车头雷达选用毫米波雷达。
38.进一步优化为,车尾雷达选用毫米波雷达。
39.采用上述技术方案,可使车头雷达和车尾雷达均有以下特点:可以进行高精度多维搜索测量,高精度距离、方位、频率和空间位置的测量定位。
附图说明
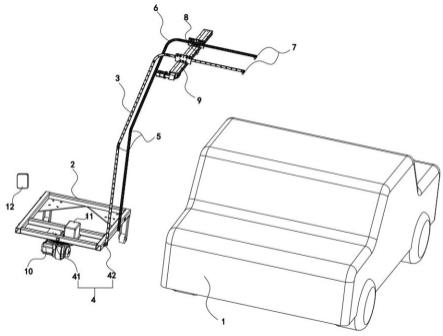
40.图1为本实施例的结构示意图。
41.图2为本实施例中检测子装置的结构示意图。
42.图3为本实施例中第二检测组件的安装示意图。
43.图4为本实施例中第三检测组件的安装示意图。
44.图5为本实施例中第四检测组件和车顶测距雷达的安装示意图。
45.图6为计算车体长度的示意图。
46.附图标记:1-车体;2-主体;3-模拟臂;31-横臂;32-弯臂;33-斜臂;34-竖臂;4-第一检测组件;41-障碍雷达;42-位姿雷达;5-第二检测组件;51-第一测距摄像头;52-第二测距摄像头;6-第三检测组件;61-车尾雷达;62-车头雷达;7-第四检测组件;71-前顶雷达;72-后顶雷达;8-车顶测距雷达;9-直线模组;10-agv驱动轮;11-运算器;12-移动终端。
具体实施方式
47.申请号为“cn202111233406.0
ꢀ”
,名称为“一种智能化自动洗车机器人
”ꢀ
的中国专利中记载的洗车机器人的运动方式实质是通过自动控制模块控制移动机构移动至待洗车辆旁,绕待洗车辆做环绕运动,但是并没有说明如何控制移动机构运动至待洗车辆旁,如何实现环绕运动,并且在清洗过程中如何保持与待洗车辆安全距离,以使汽车机器人不撞到待洗车辆上。
48.所以,现有技术存在的问题是:在洗车机器人运动至待洗车辆旁、绕待洗车辆做环绕运动以及清洗过程中,无法保持与待洗车辆的安全距离而避免撞到待洗车辆上。
49.针对上述技术问题,本发明的申请人进行了以下设计与构想:向通过一套设备能够实现自动测距和自动计算车体距离的目的,以确定不同车型的车体长度,并通过该套设备能够自动绕过障碍物,实现在车体周围进行自助环绕的目的,以此实现环绕车体清洗的过程中不碰撞到车体。
50.基于上述设计与构想,本发明结合附图1-图6进行了以下详细介绍:一种洗车机器人恒距行走装置,如图1所示,用于在洗车前、洗车过程中实时检测
与车体1的距离,包括:主体2。主体2为支架,其上可以安装洗车用的水箱、控制车体1工作的控制模块等,以实现主体2整个全部被带着环绕车体1运动。
51.agv驱动轮10,设置在主体2的底面上,具体是agv驱动轮10可拆卸连接主体2的底面上,并且以agv驱动轮10与车体1尾部同向为主体2的正前方,按照该方向依次从车体1至车体1尾部、车体1头部这样的预设路径环绕车体1运动一周进行清洗,用于自动带动主体2按照预设路径运动。
52.模拟臂3,设置在主体2的一侧,弯向车体1,当主体2被agv驱动轮10带动运动时用于随同主体2一起运动。
53.滑动件,滑动设置在模拟臂3上。滑动件优选为滑块,实现与模拟臂3滑动连接,滑动件用于沿着模拟臂3滑动。
54.模组9,滑动设置在滑动件上,其顶面与滑动件的底面滑动连接,当滑动件相对模拟臂3静止时,模组9用于在滑动件上进行往复滑动。
55.测距排障单元,分别与主体2的侧壁、模拟臂3的侧壁、滑动件的底面连接,用于检测与车体1之间的直线距离、与车顶的距离,并通过预设公式计算出车体1的长度,还用于检测主体2附近的障碍物,以改变主体2环绕车体1运动的方向。
56.移动终端12,与测距排障单元通讯连接,测距排障单元用于传输测距信息、障碍信息至移动终端12,移动终端12呈现测距信息和障碍信息。
57.将测距排障单元同时设置在主体2、模拟臂3、滑动件上,实时检测主体2与车体1、模拟臂3与车体1、模拟臂3与车顶之间的距离,并通过计算出车体1的长度掌握机器人主体2相对车体1的运动长度,并通过检测主体2附近的障碍物的方式控制agv驱动轮10绕过车体1的曲面部位,进而改变主体2的运动方向,达到避免撞到车体1的目的。通过将测距信息和障碍信息传输至移动终端12后,通过移动终端12实时给用户呈现洗车机器人的柱体与待洗车辆之间距离的信息状态,更直观的告知用户待洗车辆处于安全洗车状态,不会发生被主体2任意部位碰撞的现象。
58.具体的,如图1所示,本实施例中的测距排障单元包括:第一检测组件4,分别设置在主体2的侧壁上,在agv驱动轮10带动主体2运动时,第一检测组件4用于检测agv驱动轮10所在空间内预设距离内的障碍物、主体2与车体1之间的距离。
59.第二检测组件5,安装在模拟臂3的竖臂34的上端,当主体2与车体1平行时,用于实时检测竖臂34与车体1突出部位之间的距离。
60.第三检测组件6,可拆卸连接在模拟臂3的弯臂32上,用于分别获取前端距离信息和后端距离信息,前端距离信息是表示第三检测组件6与车体1的最前端部位之间的距离数据信息,后端距离信息是表示第三检测组件6与车体1的最后端部位之间的距离数据信息,并通过预设公式计算获得车体1的前后长度。
61.第四检测组件7,活动连接在模拟臂3的横臂31上,用于检测第一车顶距离和第二车顶距离,第一车顶距离是横臂31与车体1顶部前端之间的距离,第一车顶距离是横臂31与车体1顶部后端之间的距离。
62.车顶测距雷达8,设置在模组9上,与模组9的侧壁可拆卸连接,模组9相对滑动件滑
动时,用于实时检测与车体1的顶面之间的距离。
63.运算器11,均与第三检测组件6数据连接,用于通过预设公式计算车体1的长度,得到长度信息,并将长度信息传输至移动终端12。
64.以此可知,第一检测组件4起到的作用分别是:通过第一检测组件4检测agv驱动轮10在环绕车体1运动中,判断洗车机器人主体2前方是否有障碍物,以引导agv驱动轮10绕过车体1尾部、头部的曲面部位,在智能清洗车体1的过程中避免发生碰撞。车体1与竖臂34平行或近似平行时,通过第二检测组件5检测车体1的突出部位与竖臂34之间的距离限定车体1与机器人主体2之间的安全距离,进而保证车体1突出部位避免被碰撞。在agv驱动轮10带动主体2从车体1改变方向运动前,通过第三检测组件6检测的前端距离信息、后端距离信息以及预设公式计算得出车体1的长度,以确保主体2相对车体1平行运动的距离,以正确引导agv驱动轮10运动符合车体1长度的距离后改变运动方向。当横臂31在车体1的顶面上运动时,通过第四检测组件7检测第一车顶距离和第二车顶距离实现检测横臂31与车体1顶面的距离,以判断车体1顶面的长度,准确掌握车体1顶面的长度,为洗车机器人清洗车体1顶面做好准备,达到完全清洗车体1顶面的目的。在以线扫的方式清洗车体1顶面的过程中,通过车顶测距雷达8实时检测车体1顶面与横臂31之间的动态距离,以确保横臂31与车体1顶面之间处于非接触状态,避免横臂31碰撞车体1顶面。
65.具体的,如图2和图3所示,本实施例中的第一检测组件4包括:避障雷达,先用超声雷达,数量为1个,具体设置在主体2的第一侧壁上,与agv驱动轮10同侧,用于检测agv驱动轮10所在空间内预设距离内的障碍物,得到第一障碍模拟信号、第一障碍信息,并将第一障碍模拟信号传输给agv驱动轮10,以使agv驱动轮10改变运动方向。用于将第一障碍信息传输至移动终端12。
66.位姿雷达42,选用超声雷达,数量为6个,其中每2个分别安装在主体2的第二侧壁、第三侧壁以及第四侧壁上,用于分别检测第二侧壁、第三侧壁以及第四侧壁与主体2之间的距离,以限定主体2相对于车体1的位置和位姿,得到位置位姿信息,并将位置位姿信息传输至移动终端12。
67.通过避障雷达向agv驱动轮10提供改变运动方向的依据,以使用户移动终端12上看到agv驱动轮10能够完全绕过障碍物环绕车体1的尾部或头部进行运动,并通过位姿雷达42传输至移动终端12的位置位姿信息是用户时刻掌握洗车机器人相对于车体1的位置位姿,为避免车体1被碰撞提供直观的依据,给用户带来直观的体验感。
68.具体的,本实施例中的第二侧壁、第三侧壁以及第四侧壁均设置有两个位姿雷达42,总共为6个。通过两个位姿雷达42可以清楚的确定车体1分别与第二侧壁、第三侧壁以及第三侧壁之间的距离,从而确定主体2相对于车体1的具体位置和姿态,达到避免碰撞车体1的目的。
69.具体的,如图5所示,本实施例中的第二检测组件5包括:第一测距摄像头51,设置在竖臂34的一内壁上,当主体2与车体1平行时,用于检测车体1主驾驶一侧突出部分与竖臂34之间的距离,得到第一距离信息,并将第一距离信息传输至移动终端12。
70.第二测距摄像头52,设置在竖臂34的另一内壁上,当主体2与车体1平行时,用于检测车体1主驾驶后门的一侧突出部分与竖臂34之间的距离,得到第二距离信息,并将第二距
离信息传输至移动终端12。
71.以此通过在移动终端12上直接呈现主体2与车体1的相对位置状态,为避免主体2与车体1接触提供参考依据。
72.具体的,如图1和图5所示,本实施例中的第三检测组件6包括:车头雷达62,设置在弯臂32的一内壁上,内嵌于一内壁中,用于测量与车体1的头部突出部位之间的距离,得到前端距离信息,并将前端距离信息传输至运算器11。
73.车尾雷达61,设置在弯臂32的另一内壁上,内嵌于另一内壁中,用于获取与车体1的尾部突出部位之间的距离,得到后端距离信息,并将后端距离信息传输至运算器11,运算器11用于按照预设公式计算得出长度信息,并将长度信息传输至移动终端12。
74.以此计算得出车体1的长度,为机器人主体2相对车体1平行横向行走提供准确的距离,避免行走过多而远离车体1或过少而碰撞车体1。
75.具体的,本实施例中的第四检测组件7包括:前顶雷达71,设置在横臂31的一底面上,与一底面可拆卸连接,用于检测车体1顶部前端与一底面之间的距离,得到第一车顶距离,并将第一车顶距离传输至移动终端12。
76.后顶雷达72,安装在横臂31的另一底面上,用于检测车体1顶部后端与另一底面之间的距离,得到第二车顶距离,并将第二车顶距离传输至移动终端12。
77.以此可准确掌握车体1顶面的长度,为洗车机器人清洗车体1顶面做好准备,实现完全清洗车体1顶面的同时,给用户带来直观的洗车体1验感。
78.具体的,本实施例中的预设公式为:其中,r1是车头雷达62与车体1的头部突出部位之间的距离,r2是车尾雷达61与车体1的尾部突出部位之间的距离,h1是车头雷达62投影在与车体1的头部所在虚拟平面的投影距离,h2是车尾雷达61投影在车体1的尾部所在虚拟平面内的投影距离,l3是车头雷达62与车尾雷达61之间的距离,l是车体1的长度。
79.通过上述预设公式可准确计算出车体1的长度,为agv驱动轮10带动主体2改变运动方向提供准确的距离信息。
80.具体的,本实施例中的车头雷达62选用毫米波雷达。车尾雷达61选用毫米波雷达。可使车头雷达62和车尾雷达61均有以下特点:可进行高精度多维搜索测量,高精度距离、方位、频率和空间位置的测量定位,雷达高分辨力、宽工作频带、大数值的多普勒频率响应、短的波长易获得目标细节特征和清晰轮廓成像等特点,适于对车体1的轮廓的精准识别。抗电子战干扰性强:毫米波窗口可用频段宽,易进行宽频带扩频和跳频设计。同时针对雷达的侦察和干扰设备面临宽频带、大气衰减和窄波束等干扰难题,雷达相对微波雷达具有更好的抗力。雷达安装平台有体积、重量、振动和其它环境的严格要求:雷达天线尺寸小、重量轻,容易满足便携、弹载、车载、机载和星载等不同平台的特殊环境要求。目标特征提取和分类识别:雷达高分辨力、宽工作频带、大数值的多普勒频率响应、短的波长易获得目标细节特征和清晰轮廓成像等特点,适于目标分类和识别的重要战术要求;小目标和近距离探测:毫米波短波长对应的光学区尺寸较小,相对微波雷达更适于小目标探测。除特殊的空间目标观测等远程毫米波雷达外,一般雷达适用于30km以下的近距离探测。抗电子战干扰性强:毫
米波窗口可用频段宽,易进行宽频带扩频和跳频设计。同时针对雷达的侦察和干扰设备面临宽频带、大气衰减和窄波束等干扰难题,雷达相对微波雷达具有更好的抗力。
81.本具体实施例仅仅是对发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的保护范围内都受到专利法的保护。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。