1.本公开涉及车辆的制动控制装置。
背景技术:
2.申请人以“抑制使电动马达的驱动速度降低时的车辆的车体减速度的控制性的降低”为目的,开发了专利文献1所记载的“作为制动控制装置的控制装置100具备控制差压调整阀62以及保持阀64的阀控制部103、和控制作为泵68的动力源的电动马达67的马达控制部102。阀控制部103在使车辆减速的自动制动处理的实施中在规定条件成立时,实施使保持阀64的开度比规定条件的成立前小的阀开度变更控制。马达控制部102在自动制动处理的实施中通过阀开度变更控制使保持阀64的开度比规定条件的成立前小的状况下,实施将电动马达67的驱动速度从第一驱动速度变更为第二驱动速度的速度变更控制”。
3.例如,在专利文献1的装置中,若开始自动制动处理的实施,则开始制动促动器60的工作,电动马达67的驱动速度vmt保持为稳定速度vmts,对各差压调整阀62(也仅称为“差压阀”)的差压指令电流值ism根据目标wc压pwctr的增大而增大,保持目标wc压pwctr以使车辆的车体减速度dvs维持为与目标车体减速度dvsth一致。若保持目标wc压pwctr的状态的持续时间tm达到判定持续时间tmth,则wc压pwc的保持条件成立,开始阀开度变更控制。分别使各保持阀64(也称为“进口阀”)闭阀,从经过了恒定时间的时刻t14起,开始速度变更控制,并停止电动马达67的驱动。在电动马达67的驱动速度vmt正在变化的过渡期,由于各保持阀64分别闭阀,所以即使制动液从泵68的排出量减少也能够抑制各轮缸21内的wc压pwc的变动,所以能够抑制车辆的车体减速度dvs的控制性的降低。
4.然而,在如专利文献1所记载的那样的执行自动制动处理(也称为“自动制动控制”)的车辆的制动控制装置中,期望除了抑制车辆的减速度的变动之外,在该制动控制装置中还能够实现省电力化。
5.专利文献1:日本特开2018-154300号
技术实现要素:
6.本发明的目的在于提供一种车辆的制动控制装置,在能够执行自动制动控制的车辆的制动控制装置中,能够实现省电力化。
7.本发明所涉及的车辆的制动控制装置是在制动操作部件(bp)未被操作的情况下,通过自动地增加轮缸(cw)的液压亦即制动液压(pw)来使车辆减速的装置,具备:“调压阀(ua),设置于连接主缸(cm)与上述轮缸(cw)的连接路(hs),并调节上述主缸(cm)的液压亦即主缸液压(pm)与上述制动液压(pw)的差压(sa)”;“流体泵(hp),由电动马达(mt)驱动,向上述调压阀(ua)与上述轮缸(cw)之间的上述连接路(hs)排出制动液(bf)”;以及“控制器(ecu),控制上述调压阀(ua)以及上述电动马达(mt)”。而且,在不需要增加上述制动液压(pw)的情况下,上述控制器(ecu)使上述调压阀(ua)闭阀,并停止上述电动马达(mt)的驱动。例如,上述调压阀(ua)为常开型,在不需要增加上述制动液压(pw)的时刻,上述控制器
(ecu)使供给至上述调压阀(ua)的通电量(ia)增加规定通电量(ip)。
8.根据上述构成,在不需要增加制动液压pw的情况下,通过调压阀ua的闭阀,保持制动液压pw,停止电动马达mt的电力供给。因此,能够实现制动控制装置sc的省电力化。
附图说明
9.图1是用于说明车辆的制动控制装置sc的实施方式的整体构成图。
10.图2是用于说明包含马达停止控制的自动制动控制的处理的流程图。
11.图3是用于说明马达停止控制的工作的时间序列线图。
具体实施方式
12.<构成部件等的符号、符号末尾的角标>
13.在以下的说明中,如“cw”等那样,附加了同一符号的构成部件、要素、信号、特性等具有同一功能。在两个制动系统所涉及的符号的末尾附加的角标“1”、“2”是表示其与哪个系统相关的概括符号,“1”表示一方的制动系统(也称为“第一制动系统bk1”),“2”表示另一方的制动系统(也称为“第二制动系统bk2”)。例如,在串联型主缸cm的两个压力室(也称为“液压室”)中,与第一制动系统bk1连接的液压室是第一液压室rm1,与第二制动系统bk2连接的液压室是第二液压室rm2。能够省略角标“1”、“2”。在省略了角标“1”、“2”的情况下,其符号表示总称。例如,“rm”表示液压室。在连接路hs,将接近主缸cm的一侧(或者,远离轮缸cw的一侧)称为“上部”,将接近轮缸cw的一侧称为“下部”。
14.<车辆的制动控制装置sc的实施方式>
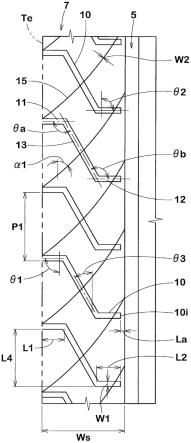
15.参照图1的整体构成图,对本发明所涉及的制动控制装置sc的实施方式进行说明。在该实施方式中,在两个系统的流体路(第一、第二制动系统bk1、bk2)中,在第一制动系统bk1中,第一液压室rm1与右前轮、左后轮的轮缸(称为“第一轮缸cw1”)连接。另外,在第二制动系统bk2中,第二液压室rm2与左前轮、右后轮的轮缸(称为“第二轮缸cw2”)连接。即,作为两个系统的流体路,采用对角线型(也称为“x型”)的流体路。这里,“流体路”是用于使作为工作液体的制动液bf移动的路径,相当于制动配管、流体单元hu的流路、软管等。
16.在具备制动控制装置sc的车辆设置有制动操作部件bp、旋转部件kt、轮缸cw、主储液器rv、主缸cm、制动操作量传感器ba、减速度传感器gx、以及车轮速度传感器vw。
17.制动操作部件(例如,制动踏板)bp是驾驶员为了对车辆进行减速而操作的部件。通过操作制动操作部件bp,来调整车轮wh的制动转矩tq,在车轮wh产生制动力。具体而言,在车辆的车轮wh固定有旋转部件(例如,制动盘)kt。而且,以夹着旋转部件kt的方式配置制动钳。
18.在制动钳设置有轮缸cw。通过增加轮缸cw内的制动液bf的压力(“轮缸液压”,也称为“制动液压”)pw,将摩擦部件(例如,刹车片)按压至旋转部件kt。旋转部件kt与车轮wh被固定为成为一体进行旋转,所以通过此时产生的摩擦力,在车轮wh产生制动转矩tq。而且,通过制动转矩tq,在车轮wh产生制动力(摩擦制动力)。
19.主储液器(也称为“大气压储液器”)rv是工作液体用的罐,在其内部储藏制动液bf。主缸cm内的活塞pg经由制动杆等与制动操作部件bp机械连接。作为主缸cm,采用串联型的主缸。在主缸cm的内部,通过主活塞pg以及副活塞ph形成有两个液压室rm1、rm2(=rm)。
在制动操作部件bp未被操作的情况下,主缸cm的第一、第二液压室rm1、rm2(也称为“主缸室”)与主储液器rv处于连通状态。在第一、第二制动系统bk1、bk2中,在制动液bf不足的情况下,从主储液器rv对液压室rm补充制动液bf。
20.若制动操作部件bp被操作,则向前进方向ha推压主缸cm内的主、副活塞pg、ph,而主缸室(液压室)rm(=rm1、rm2)与主储液器rv断开。并且,若制动操作部件bp的操作增加,则活塞pg、ph向前进方向ha移动,液压室rm的体积减少,从主缸cm排出(压送)制动液(工作流体)bf。若制动操作部件bp的操作减少,则活塞pg、ph向后退方向hb移动,液压室rm的体积增加,制动液bf朝向主缸cm返回。
21.串联型主缸cm的第一液压室rm1与第一轮缸cw1通过第一连接路hs1连接。另外,第二液压室rm2与第二轮缸cw2通过第二连接路hs2连接。第一、第二连接路hs1、hs2是将主缸cm(特别是,液压室rm1、rm2)与第一、第二轮缸cw1、cw2连接的流体路。第一、第二连接路hs1、hs2在分支部bb1、bb2分支为两个,并与第一、第二轮缸cw1、cw2连接。
22.通过制动操作量传感器ba,检测驾驶员对制动操作部件(制动踏板)bp的操作量ba。具体而言,作为制动操作量传感器ba,采用检测液压室rm内的液压(主缸液压)pm(=pm1、pm2)的主缸液压传感器pm(=pm1、pm2)、检测制动操作部件bp的操作位移sp的操作位移传感器sp、以及检测制动操作部件bp的操作力fp的操作力传感器fp中的至少一个。换句话说,操作量传感器ba是主缸液压传感器pm、操作位移传感器sp、以及操作力传感器fp的总称,制动操作量ba是主缸液压pm、操作位移sp、以及操作力fp的总称。
23.通过减速度传感器gx(未图示),检测车辆的实际的减速度gx。通过车轮速度传感器vw,检测各车轮wh的旋转速度亦即车轮速度vw。在抑制车轮wh的抱死趋势的防抱死制动控制等采用车轮速度vw的信号。由车轮速度传感器vw检测出的各车轮速度vw输入到控制器ecu。在控制器ecu中,基于车轮速度vw运算车体速度vx。
24.《驾驶辅助系统》
25.在车辆具备驾驶辅助系统,以代替驾驶员或者辅助驾驶员,经由制动控制装置sc使车辆自动停止(即,执行自动制动控制)。驾驶辅助系统构成为包含距离传感器ob、以及驾驶辅助控制器ecj。
26.通过距离传感器ob,检测存在于本车辆的前方的物体(其它车辆、固定物、人、自行车、停止线、标志、信号等)与本车辆之间的距离(相对距离)ob。例如,作为距离传感器ob,采用图像传感器、雷达传感器、超声波传感器等。或者,也可以在地图信息参照车载的gps(全球定位系统)的信息,运算相对距离ob。相对距离ob输入到驾驶辅助控制器ecj。
27.在驾驶辅助控制器ecj中,基于相对距离ob运算要求减速度gs。要求减速度gs是用于执行自动制动控制的车辆减速度的目标值。另外,由于车辆质量、以及制动装置的规格(轮缸cw的受压面积、有效制动半径、摩擦材料的摩擦系数等)已知,所以也可以将要求减速度gs换算为制动液压pw的量纲(物理量),并决定为要求液压ps(轮缸cw的液压的目标值)。另外,要求减速度gs也可以换算为对车轮wh赋予的制动转矩tq、或者车轮wh产生的制动力的量纲。要求减速度gs所涉及的状态量(状态变量)被称为“要求减速度相当值fs”。换句话说,要求减速度相当值fs(也仅称为“相当值”)由车辆的减速度、制动转矩、制动力、以及制动液压中的至少一个量纲决定。相当值fs经由通信总线bs发送至制动控制装置sc的制动控制器ecu。
28.《制动控制装置sc>>
29.制动控制装置sc由流体单元hu、以及制动控制器ecu(也仅称为“控制器”)构成。
30.流体单元hu设置于第一、第二连接路hs1、hs2。即,第一、第二液压室rm1、rm2经由流体单元hu与第一、第二轮缸cw1、cw2连接。流体单元hu构成为包含第一、第二主缸液压传感器pm1、pm2、第一、第二流体泵hp1、hp2、电动马达mt、第一、第二调压储液器rc1、rc2、第一、第二调压阀ua1、ua2、第一、第二调整液压传感器pp1、pp2、第一、第二进口阀vi1、vi2、以及第一、第二出口阀vo1、vo2。
31.在第一、第二调压阀ua1、ua2的上部设置有第一、第二主缸液压传感器pm1、pm2,以检测第一、第二液压室rm1、rm2的液压(主缸液压)pm1、pm2。主缸液压传感器pm(=pm1、pm2)相当于操作量传感器ba,主缸液压pm相当于操作量ba。此外,第一、第二主缸液压pm1、pm2实际上相同,所以能够省略第一、第二主缸液压传感器pm1、pm2中的任意一个。
32.在第一、第二连接路hs1、hs2(=hs)设置有第一、第二调压阀ua1、ua2(=ua)。调压阀ua是根据通电量(电流值)连续地控制其开阀量(升程量)的常开型的线性电磁阀(也称为“差压阀”)。将第一、第二回流路hk1、hk2(=hk)设置为连接调压阀ua的上部bm1、bm2(=bm)与调压阀ua的下部bb1、bb2(=bb)。在回流路hk设置有第一、第二流体泵hp1、hp2(=hp)、以及第一、第二调压储液器rc1、rc2(=rc)。
33.流体泵hp从调压阀ua的上部(主缸cm与调压阀ua之间的连接路hs上的部位)bm吸入制动液bf,并向调压阀ua的下部(调压阀ua与轮缸cw之间的连接路hs上的部位)bb排出制动液bf。流体泵hp被电动马达mt驱动。若电动马达mt被旋转驱动,则在回流路hk中,如虚线箭头所示那样,产生制动液bf的第一、第二回流kn1、kn2(=kn)(“hp
→
ua
→
rc
→
hp”的流动)。这里,“回流”是指制动液bf进行循环,并再次返回到原来的流动。在回流路hk设置有止回阀(也称为“单向阀”),以使得制动液bf不会逆流。
34.通过调压阀ua,对回流kn进行节流,在调压阀ua的上部(即,主缸液压pm)与下部(即,制动液压pw)之间产生压力差(差压)sa。具体而言,通过控制器ecu,对常开型的调压阀ua进行通电,从而减少其开阀量,将轮缸cw的液压pw调节为从主缸液压pm增加。
35.在第一、第二连接路hs1、hs2设置有第一、第二调整液压传感器pp1、pp2(=pp),以检测由第一、第二调压阀ua1、ua2调节后的液压(称为“第一、第二调整液压”)pp1、pp2(=pp)。由于在调压阀ua的开阀量与供给电力之间有相关关系,所以能够根据对调压阀ua的通电量(例如,电流量)调节调整液压pp。此时,也可以省略调整液压传感器pp。
36.在第一、第二连接路hs1、hs2中,从分支部bb1、bb2起下部(接近轮缸cw的一侧)的构成相同。在连接路hs(=hs1、hs2)设置有进口阀vi(=vi1、vi2)。作为进口阀vi,采用常开型的开关电磁阀。
37.连接路hs在进口阀vi的下部(即,进口阀vi与轮缸cw之间),与第一、第二减压路hg1、hg2(=hg)连接。另外,减压路hg与调压储液器rc连接。在减压路hg设置有出口阀vo(=vo1、vo2)。作为出口阀vo,采用常闭型的开关电磁阀。
38.通过防抱死制动控制等,为了减少轮缸cw内的液压(制动液压)pw,而使进口阀vi为关闭位置,并使出口阀vo为打开位置。阻止制动液bf的从进口阀vi的流入,轮缸cw内的制动液bf向调压储液器rc流出,制动液压pw减少。另外,为了增加制动液压pw,而使进口阀vi为打开位置,并使出口阀vo为关闭位置。阻止制动液bf的向调压储液器rc的流出,并向轮缸
cw导入调整液压pp,制动液压pw增加。并且,为了保持轮缸cw内的液压(制动液压)pw,而使进口阀vi和出口阀vo一起闭阀。换句话说,通过电磁阀vi、vo的控制,能够在各车轮wh的轮缸cw独立地调整制动液压pw(即,制动转矩tq)。
39.制动控制器(也称为“电子控制单元”)ecu由安装了微处理器、驱动电路等的电路基板、和被编程到微处理器的控制算法构成。控制器ecu经由车载的通信总线bs与其它的控制器(ecj等)进行网络连接,以共享信号(检测值、运算值等)。例如,制动控制器ecu通过通信总线bs与驾驶辅助控制器ecj连接。从制动控制器ecu向驾驶辅助控制器ecj发送车体速度vx。另一方面,从驾驶辅助控制器ecj向制动控制器ecu发送用于执行自动制动控制的要求减速度相当值fs(gs、ps等)。
40.通过制动控制器ecu(电子控制单元),控制流体单元hu的电动马达mt、以及电磁阀ua、vi、vo。具体而言,基于微处理器内的控制算法,运算用于控制各种电磁阀ua、vi、vo的驱动信号ua、vi、vo。同样地,运算用于控制电动马达mt的驱动信号mt。
41.在制动控制器ecu输入有制动操作量ba(pm、sp等)、车轮速度vw、调整液压pp等。另外,在制动控制器ecu,经由通信总线bs从驾驶辅助控制器ecj输入有相当值fs。通过制动控制器ecu,基于要求减速度相当值fs执行包含马达停止控制(后述)的自动制动控制。
42.<包含马达停止控制的自动制动控制的处理>
43.参照图2的流程图,对包含马达停止控制的自动制动控制的运算处理进行说明。“自动制动控制”代替驾驶员,基于相当于要求减速度gs的值fs自动地对车辆进行制动。例如,在制动操作部件bp未被操作的情况下(即,“ba=0”)执行自动制动控制,制动液压pw自动地增加。另外,在制动操作部件bp被操作的情况下(即,“ba>0”),也执行自动制动控制以使制动液压pw比主缸液压pm增加(即,调节主缸液压pm与制动液压pw的液压差sa)。“马达停止控制”是为了在自动制动控制的执行中,减少制动控制装置sc的消耗电力,而停止对电动马达mt的通电,使其转速为“0”的控制。这些运算处理被编程到控制器ecu(电子控制单元)内的微处理器。此外,通过调压阀ua进行自动制动控制中的制动液压pw的调整,所以不进行对进口阀vi、以及出口阀vo的通电。因此,在自动制动控制的执行中,使进口阀vi开阀,并使出口阀vo闭阀。
44.在步骤s110中,读入制动操作量ba、调整液压pp、车轮速度vw、减速度gx、要求减速度相当值fs(gs、ps等)、实际通电量ia、以及马达转速na的信号。操作量ba(pm等)、调整液压pp、车轮速度vw、以及减速度gx分别是由制动操作量传感器ba(pm等)、调整液压传感器pp、车轮速度传感器vw、以及减速度传感器gx检测出的信号。相当值fs的信号经由通信总线bs从控制器ecj获取。实际通电量ia是向调压阀ua的实际的通电量(例如,电流值),由设置于控制器ecu的驱动电路的通电量传感器(例如,电流传感器)检测。马达转速na是电动马达mt的实际的转速,由设置于电动马达mt的转速传感器检测。
45.在步骤s120中,运算车辆运动所涉及的各种状态量(状态变量)。具体而言,基于车轮速度vw以及公知的运算方法,运算车体速度vx。基于车体速度vx,运算实际产生的车辆的减速度(实际减速度)ga。具体而言,对于实际减速度ga来说,对车体速度vx进行时间微分,并使用该时间微分值(称为“运算减速度”)ge作为实际减速度ga。另外,实际减速度ga能够采用减速度gx(减速度传感器gx的检测值,称为“检测减速度”)。并且,也可以基于检测减速度gx以及运算减速度ge,运算实际的减速度ga。换句话说,基于检测减速度gx以及运算减速
度ge中的至少一个运算实际减速度ga。
46.在步骤s130中,基于相当值fs运算主缸液压pm与制动液压pw的差压的目标值亦即要求差压ss。具体而言,根据预先设定的运算映射图,将要求差压ss运算为根据相当值fs的增加而增加。例如,在制动操作部件bp未被操作的情况下,由于“pm=0”,所以要求差压ss与要求液压ps(要求减速度gs转换为液压后的值)一致。
47.在步骤s140中,判定“是否需要执行马达停止控制”。“马达停止控制”是在自动制动控制的执行中,为了减少制动控制装置sc的消耗电力,而停止对电动马达mt的通电,使其转速为“0”的控制。具体而言,在步骤s140中,基于“是否不需要增加制动液压pw”,判定是否需要马达停止控制。换句话说,“需要执行马达停止控制”与“不需要增加制动液压pw”对应,“不需要执行马达停止控制”与“需要增加制动液压pw”对应。
48.例如,“不需要增加制动液压pw的情况”相当于要求减速度相当值fs所涉及的状态量(状态变量)恒定的情况、或者要求减速度相当值fs所涉及的状态量减少的情况。另一方面,“需要增加制动液压pw的情况”相当于增加要求减速度相当值fs所涉及的状态量的情况。因此,在“相当值fs所涉及的状态量恒定的情况下、或者在相当值fs所涉及的状态量减少的情况下”,判定需要马达停止控制。
[0049]“要求减速度相当值fs所涉及的状态量”是相当值fs本身、根据相当值fs运算出的目标值(即,要求差压ss、要求通电量is等)、与该目标值对应的实际值(即,实际差压sa、实际通电量ia)、以及与实际差压sa对应的调整液压pp、制动液压pw中的至少一个。例如,在步骤s140中,采用相当值fs、以及实际差压sa中的至少一个作为上述的状态量,在相当值fs恒定,实际差压sa(结果,制动液压pw)恒定的状态持续了规定时间tx的情况下(即,该状态的持续时间tx达到了规定时间tx的时刻),开始马达停止控制的执行。此外,上述的“恒定”是指相当值fs(即,实际差压sa、制动液压pw)限制在预先设定的规定范围内的状态持续规定时间tx。
[0050]“在需要增加制动液压pw的情况下(例如,相当值fs为增加中的情况下、或者持续时间tx小于规定时间tx的情况下)”,对步骤s140进行否定,处理进入步骤s160。在判定为“不需要增加制动液压pw”的情况下,对步骤s140进行肯定,处理进入步骤s150。例如,步骤s140的判定(不需要增加制动液压pw的判定)在相当值fs变得恒定,且该状态的持续时间tx与规定时间tx一致的运算周期中进行肯定。
[0051]
在步骤s150中,基于制动操作量ba(例如,主缸液压pm)判定“是否进行了驾驶员对制动操作部件bp的超控操作”。“超控操作”是指在制动操作部件bp未被操作的情况下,车辆基于相当值fs进行自动减速,但在其中途,为了要求车辆减速度的增加,而驾驶员对制动操作部件bp进行操作的操作。例如,根据“操作量ba是否在规定量ba以上”来进行超控操作的判定。这里,规定量ba是预先设定的规定值(常数)。
[0052]
在驾驶员的超控操作未进行的情况下(即,“ba<ba”的情况下),对步骤s150进行否定,处理进入步骤s170。在驾驶员的超控操作被进行的情况下(即,“ba≥ba”,相应的运算周期),对步骤s150进行肯定,处理进入步骤s180。
[0053]
在步骤s160中,执行通常的自动制动控制(也仅称为“通常控制”)。这里,“通常控制”是未执行马达停止控制的情况下的自动制动控制。在步骤s160中,驱动电动马达mt。在电动马达mt的驱动控制中,进行伺服控制以使马达转速na与根据相当值fs运算出的目标转
速nt一致。或者,由于电动马达mt的转速na与对电动马达mt的通电量(供给电力,例如电流值)有相关关系,所以也可以对电动马达mt供给规定的通电量,以便在开始了自动制动控制的情况下,成为预先设定的规定的转速na。在该构成中,例如对控制器ecu的驱动电路指示“对电动马达mt进行旋转驱动的接通信号(on)”、或者“停止电动马达mt的断开信号(off)”,作为电动马达mt的驱动信号mt。
[0054]
在步骤s160中,除了电动马达mt的驱动控制之外,还控制对调压阀ua的通电量ia,以使实际差压sa与要求差压ss一致。例如,在制动操作部件bp未被操作的情况下,“pm=0”,所以将通电量ia调节为调整液压pp与要求差压ss(=ps)接近、一致。具体而言,“调压阀ua的开阀量(结果,差压sa)”与“对调压阀ua的通电量ia”的关系(所谓的“电流-液压特性”)有相关,所以如模块x160的运算映射图zis所示那样,要求通电量is被决定为在要求差压ss成为规定值so(预先设定的微小的常数)的情况下,阶段性地增加(急增)至规定通电量io(预先设定的规定的常数)。然后,在“ss>so”时,运算为要求通电量is随着要求差压ss的增加而增加。
[0055]
进行通电量反馈控制,以使实际通电量ia(实际值)与要求通电量is(目标值)接近、一致。在设置调整液压传感器pp的构成中,由于能够检测实际的差压sa,所以也可以基于要求差压ss(目标值)、以及实际差压sa(检测值)进行液压反馈控制。并且,也可以进行减速度反馈控制以使实际减速度ga与要求减速度gs接近、一致。
[0056]
在步骤s170中,为了制动控制装置sc的省电力化,而执行马达停止控制。在步骤s170中,使调压阀ua闭阀,停止电动马达mt的驱动。通过调压阀ua的闭阀,成为保持制动液压pw的状态,能够进行电动马达mt的驱动停止。具体而言,在步骤s170中,对相当值fs(=sa)变得恒定的状态下的通电量ia(例如,电流值,称为“基准通电量”)加上规定的通电量(称为“保持通电量”)ip。在调压阀ua供给有基准通电量ia与保持通电量ip之和(即,“ia ip”)。换句话说,供给至调压阀ua的通电量ia从基准通电量ia增加保持通电量ip。例如,阶段性地进行通电量ia的增加(即,急增)。
[0057]
旋转部件(制动盘)kt有在旋转的情况下产生摆动(与旋转轴成直角方向的位移)的情况。有由于该摆动,推压制动活塞,而制动液压pw稍微增加的情况。因此,若对调压阀ua供给比基准通电量ia稍大的通电量ia,使调压阀ua闭阀,则可能产生由于旋转部件kt的摆动,而调压阀ua无意中开阀的情况。因此,在调压阀ua中,通过赋予保持通电量ip,使调压阀ua可靠地闭阀。换句话说,保持通电量ip是预先设定为调压阀ua不会相对于旋转部件kt的摆动所引起的制动液压pw的增加而开阀的规定的通电量。
[0058]
基准通电量ia是与相当值fs对应的值,例如是马上停止电动马达mt的驱动之前的通电量is、ia。另外,保持通电量ip是用于使调压阀ua完全成为闭阀状态的通电量,是预先设定的规定量(常数)。因此,基准通电量ia是基于保持通电量ip的提高前的通电量。与基于保持通电量ip的要求通电量is(结果,实际通电量ia)的增加同时、或者在刚刚增加之后,停止对电动马达mt的电力供给,停止电动马达mt的旋转(即,“na=0”)。
[0059]
在步骤s180中,执行在马达停止控制的执行中,进行了制动操作部件bp的超控操作的情况下的马达再驱动控制。在马达停止控制中,通过调压阀ua的关闭位置,差压sa(=pw)被维持为恒定液压,但在步骤s180中,为了在制动液压pw反映制动操作部件bp的操作量ba,而再次驱动电动马达mt,通过调压阀ua调整差压sa。具体而言,为了返回到执行马达停
止控制之前的状态,而对电动马达mt进行旋转驱动,对调压阀ua供给基准通电量ia,维持差压sa。此时,由于超控操作,而主缸液压pm从“0”增加,所以在相当值fs恒定的情况下,制动液压pw成为对主缸液压pm加上差压sa后的液压(即,“pw=pm sa”)。
[0060]
<马达停止控制的工作>
[0061]
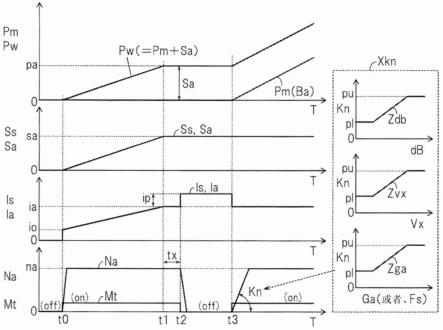
参照图3的时间序列线图(相对于时间t的各种状态量pw、sa、na等的变化),对包含马达停止控制的自动制动控制的工作进行说明。在该工作中,在图1的制动控制装置sc的构成中,采用省略了调整液压传感器pp的构成。另外,作为要求减速度相当值fs所涉及的状态量,采用要求减速度相当值fs。通过马达停止控制,在自动制动控制的执行中,停止电动马达mt的驱动,所以能够实现制动控制装置sc的省电力化。
[0062]
在线图中,假定以下的状况。驾驶员不操作制动操作部件bp,首先开始自动制动控制。其后,执行马达停止控制,在其中途,驾驶员对制动操作部件bp的超控操作被进行。因此,再驱动停止的电动马达mt。此外,在线图中,目标值(ss、is)与实际值(sa、ia)大致一致并重合。
[0063]
在驾驶员未操作制动操作部件bp的情况下(即,“pm=0”),在时刻t0,要求减速度相当值fs(例如,要求减速度gs本身)从“0”开始增加,开始自动制动控制(步骤s160的处理)。在时刻t0,马达驱动信号mt从“关闭状态”切换为“开启状态”。由此,对电动马达mt进行通电,马达转速na增加至值na(规定转速,预先设定的常数)(此外,由于电动马达mt的转子惯性等的影响,而达到规定转速na需要一点时间)。另外,与相当值fs的增加对应地,根据上述的通电量与差压的相关关系(例如,电流-液压特性),要求通电量is从“0”急增至值io,开始对调压阀ua供给通电量ia。在时刻t0以后,逐渐增加通电量is、ia,减少调压阀ua的开阀量,以使差压sa逐渐增加。由此,调整液压pp增加,四个轮缸cw的制动液压pw(=sa)逐渐增加,车辆根据要求减速度相当值fs顺利地减速。
[0064]
在时刻t1,相当值fs恒定。虽然继续电动马达mt的驱动,但对调压阀ua的电力供给量is(目标值)、ia(实际值)恒定为值ia。因此,调压阀ua根据通电量ia进行开阀,恒定地维持差压sa,制动液压pw保持为值pa。此时,开始持续时间tx的运算(累计)。到时刻t2为止,判定为“需要增加制动液压pw”,所以不执行马达停止控制。
[0065]
在时刻t2,判定“不需要增加制动液压pw”。例如,在相当值fs(结果,差压sa)限制在规定范围内的持续时间tx达到规定时间tx的时刻(相应的运算周期)对该判定进行肯定。在时刻t2,开始马达停止控制(步骤s170的处理)。对调压阀ua的供给通电量is从基准通电量ia增加(急增)保持通电量ip(预先设定的常数)。其结果,实际通电量ia从基准通电量ia增加(阶段性地急增)保持通电量ip。例如,在时刻t2,存储基准通电量ia。到时刻t2为止,常开型的调压阀ua进行开阀以对回流kn进行节流,但在时刻t2之后,通过保持通电量ip的增加,可靠地使调压阀ua为关闭位置。由此,即使由于旋转部件(制动盘)kt的摆动等而制动液压pw变动,调压阀ua也不会开阀,能够可靠地维持为闭阀状态。
[0066]
然后,马达驱动信号mt从“开启”切换为“关闭”,电动马达mt的转速na从规定转速na朝向“0”减少。通过调压阀ua的闭阀,密封调压阀ua的下部的制动液bf(即,轮缸cw内的制动液bf),所以即使电动马达mt的旋转驱动停止,制动液压pw也保持为值pa。因此,能够减少相当于向电动马达mt的电力供给量的能量,实现制动控制装置sc的省电力化。此外,虽然在线图中,同时进行电动马达mt的停止和调压阀ua的闭阀,但也可以在使调压阀ua闭阀之后,
经过了规定的时间(非常短的时间,称为“闭阀经过时间”)之后停止电动马达mt。换句话说,与调压阀ua的闭阀同时、或者在其之后进行电动马达mt的停止。在时刻t2以后,只要驾驶员不操作制动操作部件bp,则继续执行马达停止控制。
[0067]
在时刻t3,由驾驶员操作制动操作部件bp,主缸液压pm增加。在时刻t3,判定制动操作部件bp被操作(即,进行了超控操作)。在制动控制装置sc中,再驱动停止的电动马达mt以维持差压sa(主缸液压pm与制动液压pw的液压差)。此时,调节对调压阀ua的通电量,使调压阀ua开阀。详细而言,将供给至调压阀ua的通电量ia减少(例如,阶段性地急减)保持通电量ip。由此,再次通过调压阀ua对流体泵hp排出的制动液bf的回流kn进行节流,维持差压sa。
[0068]
通过流体泵hp,从主缸cm与调压阀ua之间的连接路hs吸引制动液bf,并向调压阀ua与轮缸cw之间的连接路hs排出制动液bf。在电动马达mt的再驱动时,从主缸cm(即,液压室rm)吸入制动液bf,但若马达转速na急剧地增加,则由于调压阀ua不为全开状态,所以主缸液压pm变化(稍微减少),其结果,引起操作力fp的变动。为了消除该状况,在结束马达停止控制,开始马达再驱动控制的执行时,通过限制值kn限制电动马达mt的转速na的时间变化量dn(增加梯度,相对于时间t的马达转速na的变化量)。例如,限制值kn设定为预先设定的规定梯度(常数)。另外,限制值kn也可以如模块xkn所示那样,基于制动操作速度db、车体速度vx、以及实际减速度ga(或者,相当值fs)中的至少一个运算。此外,在转速na的增加梯度dn的限制中,对电动马达mt的目标转速nt施加基于限制值kn的限制,将实际的转速na控制为与该目标转速nt一致。另外,也可以对向电动马达mt的通电量(电力供给量)施加与限制值kn对应的限制。以下,对限制值kn的可变设定进行说明。
[0069]
例如,在马达再驱动控制中,基于制动操作量ba运算制动操作部件bp的操作速度db。然后,基于对制动操作部件bp进行超控操作的时刻t3(步骤s150的判定从否定状态切换为肯定状态时的运算周期)下的操作速度db(操作量ba的时间微分值),运算限制值kn。此时,优选采用操作位移sp(操作位移传感器sp的检测值)作为操作量ba。这基于虽然起因于马达转速na的急增的变动对主缸液压pm造成影响,但操作位移sp是直接检测制动操作部件bp的操作量得到的状态量,上述变动的影响较少。限制值kn根据制动操作速度db、以及运算映射图zdb,设定为操作速度db越大,限制值kn越大。即,在对制动操作部件bp进行紧急操作的情况下,难以对马达转速na的时间变化量dn进行限制。这是因为在制动操作部件bp的紧急操作时,与提高制动操作部件bp的操作感(即,操作力fp的变动抑制)相比,优先增加制动液压pw。
[0070]
在马达再驱动控制中,基于车体速度vx决定限制值kn。具体而言。限制值kn根据对制动操作部件bp进行超控操作的时刻t3的车体速度vx、以及运算映射图zvx,设定为车体速度vx越大,限制值kn越大。即,在车体速度vx较大的情况下,难以对马达转速na的时间变化量dn进行限制。这基于在高速行驶中,与抑制操作力fp的变动相比,优先增加制动液压pw(即,增加车辆的减速度)。
[0071]
在马达再驱动控制中,基于实际减速度ga决定限制值kn。具体而言。限制值kn根据对制动操作部件bp进行超控操作的时刻t3的实际减速度ga、以及运算映射图zga,设定为实际减速度ga越大,限制值kn越大。即,在实际减速度ga较大的情况下,难以对马达转速na的时间变化量dn进行限制。这基于在车辆的减速度较大的情况下,与抑制操作力fp的变动相
比,优先增加制动液压pw(即,增加车辆的减速度)。此外,根据上述的理由,也可以代替实际减速度ga,而采用检测减速度gx、运算减速度(车体速度vx的时间微分值)ge、以及相当值fs中的至少一个。另外,也可以在与各种运算映射图zdb、zvx、zga对应的限制值kn的运算中,设置上限值ku以及下限值kl。
[0072]
<实施方式和作用
·
效果的总结>
[0073]
以下,对本发明所涉及的制动控制装置sc的构成、以及作用
·
效果进行总结。
[0074]
在制动控制装置sc中,在制动操作部件bp未被操作的情况下,执行通过自动地增加轮缸cw的液压亦即制动液压pw来对车辆进行减速的自动制动控制。在制动控制装置sc设置有“设置于连接主缸cm与轮缸cw的连接路hs,并调节主缸cm的液压亦即主缸液压pm与轮缸cw的液压亦即制动液压pw的差压sa的调压阀ua”、“由电动马达mt驱动,从主缸cm与调压阀ua之间的连接路hs吸引制动液bf,并向调压阀ua与轮缸cw之间的连接路hs排出制动液bf的流体泵hp”、以及“控制调压阀ua和电动马达mt的控制器ecu”。
[0075]
在制动控制装置sc中,通过控制器ecu,增加制动液压pw,之后在不需要增加制动液压pw的情况下,使调压阀ua闭阀,停止电动马达mt的驱动。具体而言,调压阀ua为常开型,控制器ecu在判定为不需要增加制动液压pw的时刻(例如,要求减速度相当值fs成为恒定状态的时刻),使供给至调压阀ua的通电量ia增加作为规定值的保持通电量ip。这里,“要求减速度相当值fs所涉及的状态量”是要求减速度相当值fs本身、基于要求减速度相当值fs运算出的要求差压ss、要求通电量is、以及与要求减速度相当值fs对应的结果亦即实际差压sa、调整液压pp、制动液压pw、实际通电量ia中的至少一个。另外,“恒定”是指状态变量限制在规定范围(常数)之内的状态持续了规定时间tx的状态。
[0076]
在要求减速度相当值fs所涉及的状态量(fs、ss等)恒定,不需要增加制动液压pw的情况下,根据相当值fs进行控制的差压sa(=pw)成为恒定状态,能够通过使调压阀ua闭阀,来维持该状态(最终而言,进行制动力的维持)。因此,停止对电动马达mt的电力供给,实现制动控制装置sc的省电力化。此外,为了更可靠地进行基于调压阀ua的闭阀状态的制动液压pw的保持,可以在刚刚进行了对调压阀ua的闭阀指示(即,规定的保持通电量ip的增加)之后,停止电动马达mt。
[0077]
在制动控制装置sc中,控制器ecu执行自动制动控制,在停止电动马达mt的驱动的状态下(即,马达停止控制中),进行了制动操作部件bp的操作的情况下(即,超控操作时),对电动马达mt的转速na的时间变化量dn设置限制值kn,并再驱动电动马达mt。
[0078]
在进行了超控操作的情况下,为了在制动液压pw反映驾驶员对制动操作部件bp的操作,而使闭阀的调压阀ua开阀。此时,若使电动马达mt的转速na急增,则可能产生主缸液压pm产生变动,而制动操作部件bp的操作感降低的情况。为了避免该状况,在电动马达mt被再驱动的情况下,对马达转速na的时间变化量dn设置限制。由此,能够抑制主缸液压pm的变动,提高制动操作部件bp的操作感。
[0079]
<其它的实施方式>
[0080]
在上述的实施方式中,采用了对角线型的流体路,作为两个系统的流体路。也可以代替该情况,而采用前后型(也称为“ii型”)的流体路作为两个系统的流体路。该情况下,主缸cm的第一液压室rm1与左右前轮的轮缸cw连接,第二液压室rm2与左右后轮的轮缸cw连接。在该构成中,也起到上述相同的效果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。