一种sma驱动的静电吸附式软体抓手及带有抓手的夹持装置
技术领域
1.本发明属于软体抓手技术领域,具体涉及一种sma驱动的静电吸附式软体抓手及带有抓手的夹持装置。
背景技术:
2.目前市场上机械手大多是刚性抓手,其主体材料一般采用刚性金属材料,刚性机械抓手一般不能变形和自适应形状复杂的物体。此外,当刚性机械手与人交互时,因其刚性过大、自重过重等可能会存在一些安全隐患,与传统的刚性抓捕类机器人相比,软体机器人利用其末端软体执行单元自身的柔软性改变自身形态,对一些易碎品和不规则物体进行抓取时,采取包裹形式的抓取,不会损坏物体。为实现软体执行单元对目标物体的柔顺抓取,软体执行单元需要具有弯曲、伸展、收缩等连续变形能力,但是目前软体机器人和软体机械手还存在以下问题:
3.首先,现有的软抓手通常是通过四个手指固定,对被抓取物体的形状及尺寸大小适应性较差;
4.其次,现有的软体机器人一般软体执行单元在抓取时靠软体单元与物体表面的摩擦力实现抓取,提高抓取力的方式之一是利用软体单元与物体表面间的静电摩擦力,有的学者以聚酰亚胺膜(pi膜)制作的柔性电极为抓取单元,在两层pi膜中间包夹一层铜箔作为柔性电极导电层。pi膜自身无粘性,本身强度和延展性均较弱,易被电场击穿,所以无法加过高电压,所以产生的静电吸附力较小;
5.最后,现有的柔性机械手驱动方式中,目前主要采用气体驱动和线驱动,气体驱动可以快速实现软体执行单元在低刚度下的自由变形及高刚度下的抓握稳定,但其存在的问题是由于需要外置气管、空气压缩机等复杂结构而难以实现驱动设备的小型化,同时对结构的密封性要求高,需要考虑添加限制层防止气压过高时会出现爆裂等情况。线驱动是指利用不可拉伸的线连接到软体机器人的不同部位,通过电机拉动线实现软体机器人的运动。这种驱动方式控制精度高可用于执行伸缩、盘绕、扭转等复杂动作的软体机器人。
6.然而,由于采用电机等硬质驱动器带动线进行运动,无法做到完全的柔性,而且需要复杂繁重的附加装置相比于其它驱动方式,采用智能材料驱动可实现驱动器与软体单元的一体化设计,具有机器人的微型化、自动化、响应速度快、无工作噪声等优势,因此这种驱动方式在软体机器人的研究中展现出巨大的应用潜力。在众多的智能材料中,sma可以在很小的电流及电压驱动下产生变形,驱动力大,具有简单、噪声小、耗能低等优点,同时适应结构的尺寸范围大,尤其可实现结构的微型化。通过多个sma丝(或弹簧)的布局及协同控制易于驱动软体单元实现多种复杂变形。
7.综上所述,为克服上述软体机器人或软体夹持手在工作中所面临的问题,进而提供一种sma驱动的静电吸附式软体抓手及带有抓手的夹持装置是很符合实际需要的。
技术实现要素:
8.本发明为解决现有柔性机器人存在无法调整指距而对抓取物体的形状及尺寸大小适应性较差,与物体之间的夹持摩擦力较小以及工作灵活度较低的问题,进而提供一种sma驱动的静电吸附式软体抓手及带有抓手的夹持装置;
9.一种sma驱动的静电吸附式软体抓手,所述软体抓手包括横向丝杠固定架、连接块、横向丝杠组件、纵向丝杠组件、两个纵向丝杠固定块和四个sma软体夹爪;
10.所述两个纵向丝杠固定块沿横向丝杠固定架宽度方向的中心线相对设置在横向丝杠固定架的两侧,且两个纵向丝杠固定块和横向丝杠固定架呈十字形设置,每个纵向丝杠固定块的一端与横向丝杠固定架的侧壁固定连接,连接块设置在横向丝杠固定架(顶部的中心处,且连接块与横向丝杠固定架固定连接,横向丝杠组件安装在横向丝杠固定架上,纵向丝杠组件设置在两个纵向丝杠固定块之间,且纵向丝杠组件安装在由两个纵向丝杠固定块组成的纵向丝杠固定架上,纵向丝杠组件设置在横向丝杠组件下方,且纵向丝杠组件和横向丝杠组件呈十字形设置,四个sma软体夹爪中两个sma软体夹爪设置在横向丝杠组件上,且位于横向丝杠组件上的两个sma软体夹爪沿横向丝杠组件长度方向的中心线对称设置,每个sma软体夹爪与横向丝杠组件传动连接,四个sma软体夹爪中另外两个sma软体夹爪设置在纵向丝杠组件上,且位于纵向丝杠组件上的两个sma软体夹爪沿纵向丝杠组件长度方向的中心线对称设置,每个sma软体夹爪与纵向丝杠组件传动连接;
11.进一步地,所述sma软体夹爪包括导向块、连接硅胶片、过渡硅胶片、工作硅胶片、sma弹簧和静电电极片;
12.所述连接硅胶片的中部设有竖直空腔,竖直空腔的上下两端分别设有一个固定片,且每个固定片与连接硅胶片固定连接,两个固定片之间设有多根sma丝,每根sma丝的一端与上部的固定片固定连接,每根sma丝的另一端与下部的固定片固定连接,sma丝中引出导线与外部通电电源相连;
13.所述连接硅胶片沿竖直方向设置在导向块的下方,且连接硅胶片的顶部与导向块固定连接,过渡硅胶片设置在连接硅胶片的下方,且过渡硅胶片的顶部与连接硅胶片的底部固定连接,工作硅胶片设置在过渡硅胶片的底部,且工作硅胶片与过渡硅胶片固定连接,sma弹簧设置在连接硅胶片的外侧,且sma弹簧的一端与导向块的外端壁固定连接,sma弹簧的另一端与连接硅胶片的下部固定连接,静电电极片嵌入在工作硅胶片的内侧,导向块中嵌装有螺母,导向块通过螺母与所在的双转旋丝杠螺纹连接,sma弹簧上引出导线与外部通电电源相连,静电电极片上引出导线与外部通电电源相连;
14.一种带有sma驱动的静电吸附式软体抓手的夹持装置,所述夹持装置包括三轴移动架和软体抓手,软体抓手安装在三轴移动架的工作端上;
15.本技术相对于现有技术所产生的有益效果:
16.本技术提出的一种sma驱动的静电吸附式软体抓手,包括sma驱动的软体静电吸附单元模块设计、机械本体设计和控制软抓手移动的控制系统设计。sma驱动的柔性机械手代替传统的刚性机械手,可用于抓取表面易变形、易损坏、脆性、形状复杂等物体;另外静电吸附式抓手具有噪声小、功耗低、控制简单、结构简单、成本低等优点。本发明综合了形状记忆合金(sma)驱动、静电吸附技术这两种技术,静电吸附是在库仑力的作用下产生吸附力,使柔性机械手输出力大为增加。本发明采用柔性电极为三层结构,与所抓物体接触的一侧采
用硅胶膜作为绝缘介质层,中间层采用炭黑电极作为导体电极,上层仍采用硅胶膜作为绝缘层。硅胶膜由于其自身存在一定的粘性,使软体抓手更易于粘附于物体表面,减小了吸附电极与物体表面间空气层的厚度从而提高静电吸附力。此外,本发明通过机械本体结构的设计,可控制四个软手指的距离,通过对丝杠长度的设计及相应的电机选型,本发明对被抓取物体的形状和体积具有很强的适应性。
附图说明
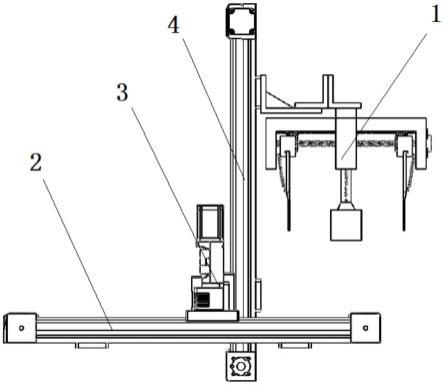
17.图1为本技术中所述夹持机构的主视示意图;
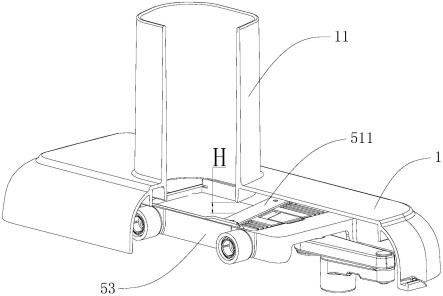
18.图2为本技术中所述软体抓手的主视示意图;
19.图3为本技术中所述软体抓手的俯视示意图;
20.图4为本技术中所述软体抓手的结构示意图;
21.图5为本技术中所述软体夹爪的侧视示意图;
22.图6为本技术中所述软体夹爪的主视示意图;
23.图7为本技术中所述软体夹爪的后视示意图;
24.图8为本技术中所述软体夹爪的的硬件连接示意图;
25.图9为本技术中所述软体夹爪工作流程示意图(图9中的电机1为一号电机,电机2为二号电机);
26.图中1软体抓手、2x轴导轨组件、3y轴导轨组件、4z轴导轨组件、11固定架、12纵向丝杠固定块、13连接块、14sma软体夹爪、141导向块、142连接硅胶片、143过渡硅胶片、144工作硅胶片、145sma弹簧、146静电电极片、15横向丝杠组件和16纵向丝杠组件。
具体实施方式
27.具体实施方式一:结合图1至图9说明本实施方式,本实施方式中提供一种sma驱动的静电吸附式软体抓手,所述软体抓手包括横向丝杠固定架11、连接块13、横向丝杠组件15、纵向丝杠组件16、两个纵向丝杠固定块12和四个sma软体夹爪14;
28.所述两个纵向丝杠固定块12沿横向丝杠固定架11宽度方向的中心线相对设置在横向丝杠固定架11的两侧,且两个纵向丝杠固定块12和横向丝杠固定架11呈十字形设置,每个纵向丝杠固定块12的一端与横向丝杠固定架11的侧壁固定连接,连接块13设置在横向丝杠固定架11顶部的中心处,且连接块13与横向丝杠固定架11固定连接,横向丝杠组件15安装在横向丝杠固定架11上,纵向丝杠组件16设置在两个纵向丝杠固定块12之间,且纵向丝杠组件16安装在由两个纵向丝杠固定块12组成的纵向丝杠固定架上,纵向丝杠组件16设置在横向丝杠组件15下方,且纵向丝杠组件16和横向丝杠组件15呈十字形设置,四个sma软体夹爪14中两个sma软体夹爪14设置在横向丝杠组件15上,且位于横向丝杠组件15上的两个sma软体夹爪14沿横向丝杠组件15长度方向的中心线对称设置,每个sma软体夹爪14与横向丝杠组件15传动连接,四个sma软体夹爪14中另外两个sma软体夹爪14设置在纵向丝杠组件16上,且位于纵向丝杠组件16上的两个sma软体夹爪14沿纵向丝杠组件16长度方向的中心线对称设置,每个sma软体夹爪14与纵向丝杠组件16传动连接。
29.本实施方式中所述的软体抓手结构,为了实现固定软抓手以及通过机械本体结构改变软抓手的指距以适应抓取大小不同的物体的功能,机械本体由步进电机、主体结构、直
线导轨滑块、法兰螺母、双螺旋丝杠、以及轴承等组成。电机与双螺旋丝杠通过联轴器连接,当电机旋转时,双螺旋丝杠转动,同时双螺旋丝杠与法兰螺母配合,从而实现将电机的转动转换为两个法兰螺母沿双螺旋丝杠的双向直线移动,两电机分别转动时可分别在两个方向改变抓手指距。
30.机械手主体结构起到与机械臂连接以及固定电机、直线导轨滑块、丝杠以及软抓手等作用。为了使整个结构轻量化,加工简单,降低成本,其主体结构由3d打印制成,材料为尼龙,其质量轻,硬度高,韧性好。抓手距离的改变采用步进电机驱动,步进电机其控制简单、控制性能好、性价比高。对于一个机器人来说,其末端执行器不宜过大过重,会增大机器人的功耗,因此,电机在满足一定负载的情况下其体积应尽可能小。本结构选用的是36hm1503a4两相4线混合式圆机身步进电机,步距角为0.9
°
,其体积为φ36
×
13mm,电机轴长15mm,额定电流为0.3a,额定力矩0.036n.m,允许径向载荷为21n,重量约60g。
31.为了使软抓手可以同时向四个方向运动,采用两根左右旋双向梯形丝杠十字异面交叉。丝杠长283mm,大径10mm,螺距2mm。采用法兰铜螺母与丝杠配合,为减小螺母在移动过程中的摩擦力,再其上方增加一个导轨滑块机构,滑块内部有滚珠,可大大减小摩擦力。通过该机构,利用丝杠螺母传动,两个方向指距(软抓手竖直状态两手指距离)的可调范围分别是24mm-240mm,64mm-240mm。
32.具体实施方式二:结合图1至图9说明本实施方式,本实施方式与具体实施方式一不同点在于,所述横向丝杠组件15包括一号电机、一号电机安装座、横向双转旋丝杠和两个一号轴承,一号电机设置在横向丝杠固定架11的一端上,且一号电机通过一号电机安装座安装在横向丝杠固定架11的外端壁上,横向双转旋丝杠设置在横向丝杠固定架11中的丝杠预留空间中,且横向双转旋丝杠的一端通过一个一号轴承安装在横向丝杠固定架11的一端内壁中,横向双转旋丝杠的另一端通过另一个一号轴承安装在横向丝杠固定架11的另一端内壁中,一号电机的电机输出轴延伸至横向丝杠固定架11中,且一号电机的电机输出轴通过联轴器与横向双转旋丝杠的一端相连,一号电机带动横向双转旋丝杠在横向丝杠固定架11中转动。其它组成和连接方式与具体实施方式一相同。
33.具体实施方式三:结合图1至图9说明本实施方式,本实施方式与具体实施方式二不同点在于,所述纵向丝杠组件16包括二号电机、二号电机安装座、纵向双转旋丝杠和两个二号轴承,二号电机设置在一个纵向丝杠固定块12的一端上,且二号电机通过二号电机安装座安装在所在纵向丝杠固定块12的外端壁上,纵向双转旋丝杠设置在两个纵向丝杠固定块12形成的丝杠预留空间中,且纵向双转旋丝杠的一端通过一个二号轴承安装一个纵向丝杠固定块12的内端壁中,纵向双转旋丝杠的另一端通过另一个二号轴承安装另一个纵向丝杠固定块12的内端壁中,二号电机的电机输出轴延伸至所在的纵向丝杠固定块12中,且二号电机的电机输出轴通过联轴器与纵向双转旋丝杠的一端相连,二号电机带动纵向双转旋丝杠在两个纵向丝杠固定块12组成的纵向丝杠固定架中转动。其它组成和连接方式与具体实施方式二相同。
34.具体实施方式四:结合图1至图9说明本实施方式,本实施方式与具体实施方式三不同点在于,所述sma软体夹爪14包括导向块141、连接硅胶片142、过渡硅胶片143、工作硅胶片144、sma弹簧145和静电电极片146;
35.所述连接硅胶片142的中部设有竖直空腔,竖直空腔的上下两端分别设有一个固
定片,且每个固定片与连接硅胶片142固定连接,两个固定片之间设有多根sma丝,每根sma丝的一端与上部的固定片固定连接,每根sma丝的另一端与下部的固定片固定连接,sma丝中引出导线与外部通电电源相连;
36.所述连接硅胶片142沿竖直方向设置在导向块141的下方,且连接硅胶片142的顶部与导向块141固定连接,过渡硅胶片143设置在连接硅胶片142的下方,且过渡硅胶片143的顶部与连接硅胶片142的底部固定连接,工作硅胶片144设置在过渡硅胶片143的底部,且工作硅胶片144与过渡硅胶片143固定连接,sma弹簧145设置在连接硅胶片142的外侧,且sma弹簧145的一端与导向块141的外端壁固定连接,sma弹簧145的另一端与连接硅胶片142的下部固定连接,静电电极片146嵌入在工作硅胶片144的内侧,导向块141中嵌装有螺母,导向块141通过螺母与所在的双转旋丝杠螺纹连接,sma弹簧145上引出导线与外部通电电源相连,静电电极片146上引出导线与外部通电电源相连。其它组成和连接方式与具体实施方式三相同。
37.本实施方式中提供的sma软体夹爪14由两大组成部分:驱动部分以及静电吸附部分。驱动部分由硅胶、内置于硅胶内部的sma丝、置于硅胶外侧的sma弹簧及固定sma两端的pcb板固定片组成;静电吸附部分由静电吸附电极组成;
38.sma通常情况下有两种状态:一种是马氏体状态,另一种是奥氏体状态;两种状态可以相互转变,即低温状态下的马氏体通过加热,当温度达到奥氏体相变温度时,sma能够恢复到它所“记忆”的形状;这种能在特定条件下能够变成母相的性质就叫做形状记忆效应。利用sma的形状记忆效应可以为软抓手提供驱动力。本方案sma丝加热收缩时,收缩力大,但变形小,而sma弹簧加热收缩时,收缩力小,但变形大。由于软抓手张开时需要较大的变形角度,当给sma弹簧通电时,弹簧会产生焦耳热,当温度达到sma奥氏体相变转变温度时,弹簧会收缩,由于弹簧两端固定,收缩时会使硅胶软抓手弯曲变形而使抓手张开;软抓手闭合时无需太大的变形角度,但需要一定的力去驱动静电吸附电极贴合物体,故选用sma丝驱动,另外sma丝体积小,可嵌在硅胶软抓手中,当抓取物体时不会因为加热的sma丝灼伤被抓取物体的表面。sma丝嵌在硅胶软抓手内部并在中性层的一侧,当sma丝加热收缩时,由于sma丝在硅胶软抓手的偏心位置,所以软抓手会产生弯曲变形而使抓手闭合;
39.为了克服传统的pi膜制成的柔性电极吸附力小的问题,设计了硅胶膜柔性电极,其结构采用三层结构,上下层均为硅胶膜,中间层为炭黑电极。吸附电极的设计利用了硅胶膜与壁面间的粘附力减小吸附电极与壁面间空气层厚度,增大软体抓手与壁面间的静电吸附力。炭黑电极因其在硅胶膜上的粘附性好以及柔顺性好等方面优点适合制作静电吸附电极;
40.软体夹爪的主体为硅胶,利用模具,向其中浇注硅胶溶液,待硅胶固化后便可制作出硅胶软体静电吸附单元,其具体的制作步骤如下:
41.①
在软抓手模具的卡槽中安装pcb板固定片;
42.②
剪裁长度合适的sma丝,对其反复加热拉伸训练5-6次;
43.③
在pcb板固定片的小孔中穿入训练好的sma丝并用焊锡固定sma丝和pcb板固定片,并引出导线;
44.④
将之前制作好的炭黑柔性电极片裁剪成大小合适的形状,然后铺放在模具中,并引出导线;
45.⑤
将硅胶主剂和固化剂按14:1配制,然后将配制好的溶液放入真空箱中排出其中的气泡;
46.⑥
在模具中喷涂硅胶脱模剂,方便后期取模;
47.⑦
在模具中浇注排好气泡的硅胶溶液,放入干燥箱中,将温度调到40摄氏度左右,静置10小时左右,待硅胶固化后即可从模具中取出软抓手。
48.最后将sma弹簧由外侧固定在pcb固定片上。
49.具体实施方式五:结合图1至图9说明本实施方式,本实施方式与具体实施方式四不同点在于,所述连接硅胶片142的厚度大于工作硅胶片144的厚度,连接硅胶片142的宽度小于工作硅胶片144的宽度。其它组成和连接方式与具体实施方式四相同。
50.具体实施方式六:结合图1至图9说明本实施方式,本实施方式与具体实施方式五不同点在于,所述工作硅胶片144的内侧加工有布置凹槽,静电电极片146设置在布置凹槽中,布置凹槽的开口处设有硅胶薄膜,硅胶薄膜的厚度为静电电极片146厚度的一半。其它组成和连接方式与具体实施方式五相同。
51.具体实施方式七:结合图1至图9说明本实施方式,本实施方式与具体实施方式六不同点在于,所述过渡硅胶片143的顶部宽度与连接硅胶片142的宽度相同,过渡硅胶片143的顶部厚度与连接硅胶片142的厚度相同,过渡硅胶片143的底部宽度与工作硅胶片144的宽度相同,过渡硅胶片143的底部厚度与工作硅胶片144的厚度相同。其它组成和连接方式与具体实施方式六相同。
52.具体实施方式八:结合图1至图9说明本实施方式,本实施方式与具体实施方式七不同点在于,所述夹持装置包括三轴移动架和软体抓手1,软体抓手1安装在三轴移动架的工作端上。其它组成和连接方式与具体实施方式七相同。
53.具体实施方式九:结合图1至图9说明本实施方式,本实施方式与具体实施方式八不同点在于,所述三轴移动架包括y轴导轨组件3、z轴导轨组件4和两个x轴导轨组件2,两个x轴导轨组件2相对平行设置,y轴导轨组件3设置在两个x轴导轨组2上,且y轴导轨组件3通过两个活动滑块与两个x轴导轨组件2滑动连接,z轴导轨组件4设置在y轴导轨组件3上,且z轴导轨组件4通过一个活动滑块与y轴导轨组件3滑动连接其它组成和连接方式与具体实施方式八相同。
54.具体实施方式十:结合图1至图9说明本实施方式,本实施方式与具体实施方式九不同点在于,所述x轴导轨组件2为丝杠导轨组件或传送带导轨组件,y轴导轨组件3为丝杠导轨组件或传送带导轨组件,z轴导轨组件4为丝杠导轨组件或传送带导轨组件。其它组成和连接方式与具体实施方式九相同。
55.本发明已以较佳实施案例揭示如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可以利用上述揭示的结构及技术内容做出些许的更动或修饰为等同变化的等效实施案例,但是凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施案例所做的任何简单修改、等同变化与修饰,均仍属本发明技术方案范围。
56.工作原理:
57.本技术所述的软体抓手结构在使用时通常通过控制系统进行控制工作;控制系统的硬件主要由36hm1503a4步进电机、m420b步进电机驱动器、手机端口、stm32f103c8t6单片
机最小系统板、hc-06蓝牙无线串口通讯模块、继电器、降压模块以及限位开关组成;
58.为了改变两抓手的距离以适应抓取大小不同的物体,采用丝杠螺母传动原理,利用步进电机驱动。36步进电机的工作电流为0.3a,但是单片机最大输出电流为25ma,无法直接驱动步进电机,故需要采用步进电机驱动器驱动。m420b步进电机驱动器有两组端口,一组为信号输出端口,与步进电机相连;另一组为信号输入控制端,信号控制端有4个输入端口,其中pul为脉冲信号输入端口,连单片机pwm信号输出引脚,通过改变其频率,实现对电机转速的控制;dir为电机的转向控制端,其输入电平高低不同,电机转向也不同;vcc为电源端,连单片机的电源输出端口;
59.在机械本体结构上固定两个限位开关,用以防止螺母运动超程而破坏机械本体结构。降压模块的功能是实现将直流24v电压降压为直流5v电压,为单片机、蓝牙模块以及继电器供电。整个控制系统的控制器采用stm32f103单片机进行控制,stm32单片机是一种基于arm内核的微处理器,体积小质量轻、集成度高、开发简易,广泛应用在各个领域。软抓手的张开与闭合均需要较大的电流加热sma使其发生相变,另外静电吸附电极的供电也需要较高电压,因此均需要直流稳压电源供电。通过按电源开关来供电与断电十分不便,故采用继电器来控制电流的通断。所采用的继电器为5v/6路继电器,该继电器有6个信号输入控制端,分别与单片机相应的输出引脚相连,触发电流仅5毫安,可直接由单片机io端口输出的电流触发。继电器的输出端为6路开关,每路开关有3个输出端口,分别是常开(no)、常闭(nc)以及公共端(com);
60.机械控制系统采用蓝牙无线串口通讯模块传输指令,选用hc-06蓝牙芯片。该芯片具有高速度、高兼容性、多连接等优点。共有4个输入输出引脚,蓝牙芯片上的接收、发送引脚与单片机上的接收、发送引脚交叉连接,vcc电源端,输入电压为3.6~6v,gnd为接地端。工作时,手机作为上位机发送指令,单片机通过蓝牙模块接收指令并对指令进行判断从而发出不同的控制信号;
61.整个控制系统的控制包括:电机的正转、反转以及停止;软抓手张开通电与断电;软抓手闭合通电与断电;静电吸附电极的通电与断电。
62.单片机上电后,首先使能并配置相应的io口、配置外部中断、配置串口1、配置pwm信号输出所需的定时器等。之后,进入while(1)死循环等待上位机发送指令。当需要控制抓手时,上位机(手机蓝牙串口软件)发出指令,单片机通过蓝牙模块接收指令,产生接收中断,进入接收中断服务函数,利用switch语句对指令进行判断,最后根据指令的不同执行不同的控制语句,从而实现远端无线控制。控制系统操控软抓手时,软抓手连接在一个四自由度的位移滑台上,其中三个直线移动自由度实现对目标抓取物体的定位,另外一个转动自由度可以调整抓手抓取物体时的角度;
63.基于上述控制系统,本技术所述装置在进行夹持工作时首先通过三轴移动架将软体夹手运送至目标物体附近,此时各个夹爪处于张开状态,当软体夹手处于夹持区域时,通过控制两个丝杠进行工作,使横向的两个夹爪和纵向的两个夹爪向物体进行运动,当夹爪靠近物体时对夹爪中的sma丝进行加热,同时对静电电极通电,通过sma丝对夹爪爪体的变形驱动带动柔性电极贴近物体并产生静电吸附力实现夹持动作,在保证物体夹持稳定后可以对物体进行相应的移动,待移动到目标区域后,首先对静电电极断电,同时对sma弹簧进行加热,前者使夹爪与物体分离,sma弹簧加热后用于对夹爪复位,此时在控制两个丝杠进
行反向工作,使横向的两个夹爪和纵向的两个夹爪远离物体,对sma断电,夹爪恢复原工作状态,等待下一个工作流程。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。