1.本发明涉及一种主从工作空间映射方法,具体地说是一种基于力反馈的主从异构遥操作工作空间映射方法,属于机械臂遥操作领域。
背景技术:
2.随着现代工业技术的发展与革新,很多探索工作和危险环境工作等情况人类无法直接完成,比如水下作业,作业人员本就饱受水下作业的精神压力困扰,人类的身体机能更无法达到长时间的工作,深海更是人类无法直接到达的危险地带。在核工业和化工产业中,在处理核废料和有毒化工废料时,作业人员无法直接与废料接触。因此主从遥操作机器人成为一种有效的解决方案。
3.在早期的主从遥操作系统中,主端机械臂和从端机械臂有着相同的结构,最早可以追溯到上1952年由美国的goertz针对处理放射性物质设计的遥操作机器人,采用对称的主从机械臂,这种主端设备和从端设备拥有相同结构的遥操作系统称为主从同构型遥操作系统。随着高速运算设备的发展,实时计算机械臂之间的坐标转换成为现实,不同于主从同构型遥操作机器人系统,主从异构型遥操作机器人系统由于主从结构形式多样,大大扩展了主从设备的可选范围。
4.对于主从同构机械手来说,即主端机械手和从端机械手有相同的自由度和工作空间,因此主端工作空间中的点和从端工作空间中的点可以很好的一对一的映射,只需进行主端的机械手与从端机械手关节角-关节角之间的控制就可以达到很好的效果。但是,主端由于是人为操作导致主端工作空间大小受到限制,从而导致从端空间大小的限制。随着能够实时执行坐标变换的快速数字计算机的出现,非同构构型遥操作也成为现实。异构机械手主端和从端的工作空间差异很大,所以就需要一种工作空间映射方法使主端工作空间能够覆盖到从端的整个工作空间,并同时执行复杂或者精细的操作任务。
技术实现要素:
5.要解决的技术问题
6.为了避免现有技术的不足之处,本发明提供一种基于力反馈的位移-速度混合映射方法,此方法首要解决主从空间映射不一致的问题,并在此基础上提供一种操作精度与广度兼并的方法,提高遥操作的操作性能,减少操作歧义性与复杂度。
7.技术方案
8.一种基于力反馈的主从异构遥操作工作空间映射方法,其特征在于步骤如下:
9.步骤1:通过以太网连接主端遥操作机械臂并建立通讯,获取主端机械臂末端的位置x
′m=(x
′m,y
′m,z
′m)并记录;
10.步骤2:实时更新当前主端遥操作机械臂末端位置xm,结合步骤1记录的上一时刻的末端位置x
′m,求得末端位置偏移量δxm=x
m-x
′m;最后更新上一时刻的末端位置x
′m=xm;
11.步骤3:设置位置映射比例系数k
p
=(k
px
,k
py
,k
pz
)使得主端机械臂末端位移量比例
映射到从端机械臂末端位移量;从端机械臂末端位移量δxs与主端机械臂末端位移量δxm满足关系式:
[0012][0013]
步骤4:设置速度映射比例系数kv=(k
vx
,k
vy
,k
vz
)使得主端机械臂末端位置边缘偏移量x
offset
比例映射到从端机械臂末端速度;从端机械臂末端速度vs与主端机械臂末端边缘偏移量x
offset
满足关系式:
[0014][0015]
其中,x
offset
=(x
offset
,y
offset
,z
offset
);
[0016]
步骤5:设置映射工作空间,其中映射空间分为位移映射空间和速度映射空间两部分;
[0017]
所述的位移映射空间:以xi为圆心的,半径为rs的球形空间,在此空间内从端机械臂末端位移服从步骤3的比例映射;
[0018]
所述的速度映射空间:在位置映射空间外设置速度映射空间,映射比例与边缘偏移量x
offset
成正比,并结合力反馈设备,设置与偏移矢量方向相反,大小成正比的力f,并限制从端机械臂末端的最大速度v
max
与最小速度v
min
;
[0019]
步骤6:根据上一控制周期从端机械臂末端位置x
′s与从端机械臂末端位移量δxs求得从端机械臂当前末端位置xs;
[0020]
步骤7:根据步骤6求得的从端机械臂末端目标位置xs,对机械臂进行逆运动学求解得到机械臂目标关节角θ,令机械臂服从目标关节角进行运动,以实现遥操作;如果无解则令δxs=0,即xs=x
′s。
[0021]
本发明进一步的技术方案:步骤5所述的速度映射空间具体为:在位置映射空间外设置速度映射空间,映射比例与边缘偏移矢量x
offset
成正比例关系,设置过渡区间{x
offset
|0<||x
offset
||<e},在此区间内不进行映射,其中e表示过渡区间宽度;在速度映射空间限制从端机械臂末端的最大速度v
max
与最小速度v
min
;则最终从端机械臂末端速度vs满足关系式:
[0022][0023]
其中||x
offset
||表示x
offset
的二范数,即x
offset
的长度,||vs||表示vs的二范数,即速
度的大小,e表示过渡区间宽度,v
max
和v
min
表示映射最大速度和最小速度。
[0024]
在速度映射下,从端机械臂末端位移量δxs满足关系式:
[0025]
δxs=vst
[0026]
其中t为控制周期;
[0027]
结合力反馈设备,设置与x
offset
方向相反,大小成正比的反向力f,满足关系式:
[0028][0029]
其中kf为力反馈系数。
[0030]
本发明进一步的技术方案:所述的步骤6具体为:xs=x
′s δxs。
[0031]
一种计算机系统,其特征在于包括:一个或多个处理器,计算机可读存储介质,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现上述的方法。
[0032]
一种计算机可读存储介质,其特征在于存储有计算机可执行指令,所述指令在被执行时用于实现上述的方法。
[0033]
有益效果
[0034]
本发明提供的一种基于力反馈的主从异构遥操作工作空间映射方法,与现有的方法相比,具有以下优势:
[0035]
1、相比于传统的末端位置-位置的映射,本发明使用了末端位移量-位移量映射,使从端的位置映射空间可以覆盖从端全部的工作空间,即在任何位置都可以进行精准的位置映射。
[0036]
2、设计了速度-位移混合映射方案,既可以使用位移映射满足遥操作的精度需求,也可以满足遥操作的对于广度的需求,实现了两者的高效融合。
[0037]
3、针对混合映射的边缘误切换问题,通过结合力反馈设备,在速度映射空间设置最小相应偏移量,即边缘偏移量小于此偏移量不会进行任何映射,有效的解决了混合映射的边缘误切换问题。
附图说明
[0038]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
[0039]
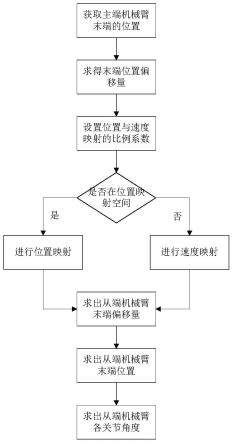
图1基于力反馈的位移-速度混合映射方法流程图。
[0040]
图2主端映射空间分布示意图。
[0041]
图3四自由度从端机械臂仿真示意图。
[0042]
图4主端机械臂末端轨迹图。
[0043]
图5从端仿真机械臂末端轨迹图。
具体实施方式
[0044]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面描述的本发明各个实施方式中所涉及到的技术特征只要彼此
之间未构成冲突就可以相互组合。
[0045]
本发明为一种基于力反馈的主从异构遥操作工作空间映射方法,该方法的流程图如图1所示,下面将详细介绍本方法的具体实施步骤。
[0046]
步骤1:通过以太网连接主端遥操作机械臂并建立通讯,获取主端机械臂末端的位置x
′m=(x
′m,y
′m,z
′m)并记录。
[0047]
具体实施方法:
[0048]
本方法基于力反馈设备geomagic touch,通过以太网连接后可直接获取到主端机械臂的末端位置x
′m=(x
′m,y
′m,z
′m)。
[0049]
步骤2:实时更新当前主端遥操作机械臂末端位置xm,结合步骤1记录的上一时刻的末端位置x
′m,求得末端位置偏移量δxm=x
m-x
′m。最后更新上一时刻的末端位置x
′m=xm。
[0050]
具体实施方法:
[0051]
通过程序中记录上一控制周期t的末端位置x
′m与当前时刻的末端位置xm求得末端位置偏移量δxm。满足关系式:
[0052][0053]
最后更新上一时刻记录的末端位置x
′m=xm。
[0054]
步骤3:设置位置映射比例系数k
p
=(k
px
,k
py
,k
pz
)使得主端机械臂末端位移量比例映射到从端机械臂末端位移量。
[0055]
具体实施方法:
[0056]
基于步骤2求得的主端末端位置偏移量δxm=(δxm,δym,δzm),设置主从位置映射比例系数矩阵k
p
=(k
px
,k
py
,k
pz
)使从端末端位置偏移量δxs满足:
[0057][0058]
一般情况下各比例系数满足k
px
=k
py
=k
pz
,当k
px
=k
py
=k
pz
=1时,从端的末端位移将等效的复制主端的末端位移,当从端机械臂的工作空间远大于主端工作空间时,将设置比例系数k
px
=k
py
=k
pz
>1以满足遥操作的灵活性。
[0059]
步骤4:设置速度映射比例系数kv=(k
vx
,k
vy
,k
vz
)使得主端机械臂末端位置边缘偏移量x
offset
比例映射到从端机械臂末端速度。
[0060]
具体实施方法:
[0061]
速度映射空间为位移映射空间的外围空间,具体的映射空间分布将在步骤5详细说明。设主端机械臂末端位置超出位移映射空间的距离,即边缘偏移量为x
offset
=(x
offset
,y
offset
,z
offset
)。在映射空间内设速度映射比例系数kv=(k
vx
,k
vy
,k
vz
),则从端机械臂末端速度vs与边缘偏移量x
offset
成正比例关系。则从端机械臂的末端速度vs满足:
[0062][0063]
步骤5:设置映射空间,其中映射空间分为位移映射空间和速度映射空间。
[0064]
具体实施方法:
[0065]
设置映射空间为一在机械臂工作空间内尽量大的球形空间,分为位置映射空间与速度映射空间两部分,如图2所示。以下进行详细说明:
[0066]
位移映射空间:以xi为圆心的,半径为rs的球形空间,在此空间内从端机械臂末端位移服从步骤3的比例映射。
[0067]
速度映射空间:在位置映射空间外设置速度映射空间,映射比例与边缘偏移矢量x
offset
成正比例关系,设置过渡区间{x
offset
|0<||x
offset
||<e},在此区间内不进行映射,其中e表示过渡区间宽度。在速度映射空间限制从端机械臂末端的最大速度v
max
与最小速度v
min
。则最终从端机械臂末端速度vs满足关系式:
[0068][0069]
其中||x
offset
||表示x
offset
的二范数,即x
offset
的长度,||vs||表示vs的二范数,即速度的大小,e表示过渡区间宽度,v
max
和v
min
表示映射最大速度和最小速度。
[0070]
在速度映射下,从端机械臂末端位移量δxs满足关系式:
[0071]
δxs=vst
[0072]
其中t为控制周期。
[0073]
结合力反馈设备,设置与x
offset
方向相反,大小成正比的反向力f,满足关系式:
[0074][0075]
其中kf为力反馈系数。
[0076]
步骤6:根据上一控制周期从端机械臂末端位置x
′s与从端机械臂末端位移量δxs求得从端机械臂当前末端位置xs。
[0077]
具体实施方法:
[0078]
当前时刻的从端机械臂末端位置xs满足关系式:
[0079]
xs=x
′s δxs[0080]
其中x
′s为记录的上一时刻的从端机械臂末端位置,δxs为位移映射或速度映射下,即步骤2和步骤5求得的末端偏移量。
[0081]
步骤7:根据步骤6求得的从端机械臂末端目标位置xs,对机械臂进行逆运动学求
解得到机械臂目标关节角θ,令机械臂服从目标关节角进行运动,以实现遥操作。如果无解则令δxs=0,即xs=x
′s。
[0082]
具体实施方法:
[0083]
根据步骤6求得的从端机械臂末端目标位置xs,对机械臂进行逆运动学求解得到从端机械臂各关节目标角度θ=[θ1,θ2,
…
,θn],将目标关节角信息发送到从端机械臂使其运动到目标位置,从而实现机械臂主从异构遥操作。如果逆运动学无解,则令δxs=0,即xs=x
′s,从端机械臂将保持当前状态。
[0084]
机械臂逆运动学求解方法参考以下文献:
[0085]
kucuk s,bingul z.the inverse kinematics solutions of industrial robot manipulators[c]//ieee international conference on mechatronics.ieee,2004.
[0086]
仿真实例
[0087]
图3为在matlab下四自由度从端机械臂的仿真示意图,主端设备为geomagic touch7六自由度力反馈手柄。图4为主端机械臂末端的轨迹图,记录了仿真期间主端机械臂末端在三维空间中的运动轨迹。图5则为仿真从端机械臂的末端轨迹图,从左上到右下分别有三个虚线框表示映射的三个阶段,首先是刚开始的位置映射阶段,其跟随主端进行比例位置映射;之后主端机械臂末端到达速度映射区间,从端则进行速度映射;最后是第二段位置映射阶段。从仿真结果来看,该方法即保证了小区域内的精准操作,也保证了从端机械臂可以在大范围内进行灵活移动,将精度与广度进行了有效的融合,结果较为理想。
[0088]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。