1.本发明涉及机械臂控制技术领域,特别是涉及一种基于非接触式电子皮肤的机械臂控制方法及系统。
背景技术:
2.在当前的机器人研究领域中,仍然有很多努力致力于克服非结构化环境带来的挑战。医学、医疗保健、农业、工业4.0以及太空和水下探索等领域正在等待从目前正在开发的机器人技术中获利。此外,就非结构化环境或情况而言,主要挑战之一是开发能够与人类进行安全可靠交互的机器人技术。
3.机械臂已经大规模应用于工业生产制造,目前的机械臂基本是使用示教来完成工作,机械臂会固定地跑固定程序,执行提前示教的动作,对于机械臂周边没有人或者无人工厂来说,这种机械臂已经满足使用需求。然而,大部分工业生产都是人与机械臂并存的工作场景,所以这种跑固定程序的机械臂会给人带来严重的生命威胁,因此机械臂需要有感知人的功能。
4.目前大部分智能的机械臂会给机械臂安装相机作为视觉传感器感知周围的环境,利用视觉识别人与机器人的位置,控制机器人停止运动或者避障来保障人的安全。然而视觉对光照比较敏感,在光照条件不好的情况下,难以有效感知环境,另外视觉传感器会受到物体遮挡的问题,从而产生视觉盲区,也会存在安全隐患。
技术实现要素:
5.有鉴于此,本发明提供了一种基于非接触式电子皮肤的机械臂控制方法及系统,以避免由于视觉传感器存在光照的问题或遮挡存在视觉盲区的问题,导致机械臂工作过程中存在安全隐患的缺陷,提高机械臂避障的可靠性。
6.为实现上述目的,本发明提供了如下方案:
7.一种基于非接触式电子皮肤的机械臂控制方法,所述控制方法包括如下步骤:
8.获取安装在机械臂上的每个非接触式电子皮肤测量的距离信息;所述距离信息为非接触电子皮肤所在位置与障碍物的距离;
9.根据所述距离信息,计算机械臂所受到的总斥力;
10.将所述总斥力转换为机械臂的避障轨迹;
11.根据所述避障轨迹控制机械臂运动。
12.可选的,所述总斥力的计算公式为:
[0013][0014]
其中,f表示机械臂所受到的总斥力,n表示设置在机械臂上的非接触式电子皮肤的数量,d
max
为非接触式电子皮肤所能感应到的最远距离,f
max
表示最大斥力,k表示斥力因
子,di表示设置在机械臂上的第i个非接触式电子皮肤所感应到的距离信息。
[0015]
可选的,所述将所述总斥力转换为机械臂的避障轨迹,具体包括:
[0016]
基于笛卡尔空间的导纳模型将所述总斥力转换为机械臂末端的位置;
[0017]
根据机械臂末端的位置形成所述避障轨迹。
[0018]
可选的,所述基于笛卡尔空间的导纳模型将所述总斥力转换为机械臂末端的位置,具体包括:
[0019]
基于笛卡尔空间的导纳模型将所述总斥力转换为机械臂末端的位置为:
[0020][0021][0022]
其中,x表示机械臂经过导纳控制后的位置,即机械臂末端的位置,md表示导纳模型的惯性矩阵,bd表示导纳模型的阻尼矩阵,bd表示导纳模型的刚度矩阵,xr表示机械臂在笛卡尔空间的位置,f表示机械臂所受到的总斥力。
[0023]
可选的,所述根据所述避障轨迹控制机械臂运动,具体包括:
[0024]
基于逆运动学将所述避障轨迹转换成机械臂各关节的位置;
[0025]
根据各关节的位置控制机械臂运动。
[0026]
一种基于非接触式电子皮肤的机械臂控制系统,所述控制系统应用于上述的控制方法,所述控制系统包括:
[0027]
距离信息获取模块,用于获取安装在机械臂上的每个非接触式电子皮肤测量的距离信息;所述距离信息为非接触电子皮肤所在位置与障碍物的距离;
[0028]
总斥力计算模块,用于根据所述距离信息,计算机械臂所受到的总斥力;
[0029]
避障轨迹获取模块,用于将所述总斥力转换为机械臂的避障轨迹;
[0030]
运动控制模块,用于根据所述避障轨迹控制机械臂运动。
[0031]
一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述的控制方法。
[0032]
可选的,所述电子设备,还包括设置在机械臂上的多个非接触式电子皮肤,多个所述非接触式电子皮肤与所述处理器连接,所述非接触式电子皮肤用于向所述控制器提供执行所述计算机程序时所需的距离信息。
[0033]
一种计算机可读存储介质,其所述存储介质上存储有计算机程序,所述计算机程序被执行时实现上述的控制方法。
[0034]
根据本发明提供的具体实施例,本发明公开了以下技术效果:
[0035]
本发明公开一种基于非接触式电子皮肤的机械臂控制方法及系统,所述控制方法包括如下步骤:获取安装在机械臂上的每个非接触式电子皮肤测量的距离信息;所述距离信息为非接触电子皮肤所在位置与障碍物的距离;根据所述距离信息,计算机械臂所受到的总斥力;将所述总斥力转换为机械臂的避障轨迹;根据所述避障轨迹控制机械臂运动。本发明采用非接触式电子皮肤作为环境的感知传感器,利用非接触式电子皮肤检测的距离信息进行总斥力计算,进而获得机械臂的避障轨迹,避免了由于视觉传感器存在光照的问题或遮挡存在视觉盲区的问题,导致机械臂工作过程中存在安全隐患的缺陷,提高了机械臂避障的可靠性。
[0036]
而且本发明采用的是在笛卡尔空间避障,在不改变机械臂末端姿态的情况下进行避障,克服了传统关节避障带来的机械臂末端姿态改变而导致出现不可预知的问题。
附图说明
[0037]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0038]
图1为本发明实施例提供的一种基于非接触式电子皮肤的机械臂控制方法的流程图;
[0039]
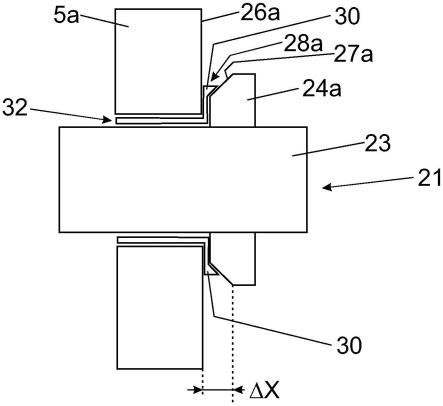
图2为本发明实施例提供的机械臂的结构示意图。
具体实施方式
[0040]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0041]
本发明的目的是提供一种基于非接触式电子皮肤的机械臂控制方法及系统,避免由于视觉传感器存在光照的问题或遮挡存在视觉盲区的问题,导致机械臂工作过程中存在安全隐患的缺陷,提高机械臂避障的可靠性。
[0042]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0043]
实施例1
[0044]
非接触式电子皮肤是一项有可能在机器人技术的未来发挥重要作用的技术。它可以在工业和日常生活以及在太空和水下中实现安全、强大和自主系统的承诺,与人类一起协同工作。非接触式的电子皮肤作为环境的感知传感器没有视觉传感器的缺陷,并且具有响应快,灵敏度高的优点,使其在靠近物体但尚未接触的情况下可以做出响应,同时依据距离信息反馈调节机器人在不同交互情况下的行为方式,达到安全、灵敏的人机交互,所以非接触式电子皮肤更适合作为人机安全协作的安全保障,基于此,本发明实施例1提供一种基于非接触式电子皮肤的机械臂控制方法,如图1所示,所述控制方法包括如下步骤:
[0045]
步骤101,获取安装在机械臂上的每个非接触式电子皮肤测量的距离信息。所述距离信息为非接触电子皮肤所在位置与障碍物的距离。非接触式电子皮肤在机械臂上的安装位置如图2所示。
[0046]
步骤102,根据所述距离信息,计算机械臂所受到的总斥力。
[0047]
步骤103,将所述总斥力转换为机械臂的避障轨迹。
[0048]
步骤104,根据所述避障轨迹控制机械臂运动。
[0049]
现有的避障方案是基于机械臂关节空间的避障,机械臂在避障的时候末端姿态会发生改变,这样会导致出现不可预知的问题,比如末端搬运的是装有液体的罐子,当末端姿态改变时,会导致液体撒出的问题;如果使用吸盘吸取工件,机械臂末端姿态改变也会导致
吸力由法向变成切向,从而导致工件脱落,鉴于此,本发明的步骤102-步骤104具体如下。
[0050]
步骤102的具体实现方式为:
[0051]
采用二阶数学模型把非接触式电子皮肤测量的位置信息转换成虚拟力,并把各个虚拟力进行叠加计算,得到在笛卡尔空间机械臂所受到的总斥力,总斥力的计算公式如下:
[0052][0053]
其中,f表示机械臂所受到的总斥力,n表示设置在机械臂上的非接触式电子皮肤的数量,d
max
为非接触式电子皮肤所能感应到的最远距离,f
max
表示最大斥力,k表示斥力因子,di表示设置在机械臂上的第i个非接触式电子皮肤所感应到的距离信息。
[0054]
步骤103具体包括:
[0055]
基于笛卡尔空间的导纳模型把总斥力转换成机械臂末端的位置,导纳控制公式如下:
[0056][0057]
md表示导纳模型的惯性矩阵,bd表示导纳模型的阻尼矩阵,bd表示导纳模型的刚度矩阵,xr表示机械臂在笛卡尔空间的位置,x表示机械臂经过导纳控制后的位置。
[0058]
本发明实施例中的导纳模型为机械臂的动力学模型,可通过对机械臂进行动力学建模获得,进而可进一步的获得导纳模型的惯性矩阵、阻尼矩阵和刚度矩阵,可避免复杂的推导和各种力分析过程。
[0059]
通过导纳模型把总斥力转换成机械臂在笛卡尔空间的加速度:
[0060][0061]
加速度经过二次积分可以得到机械臂末端的位置。
[0062][0063]
由导纳模型计算得到的机械臂末端的位置形成新的运动轨迹,即避障轨迹。可避障的原因在于已经通过非接触式的电子皮肤感知到障碍物的位置,从而在计算新运动轨迹时已经将障碍物所在位置剔除,达到避障效果。
[0064]
步骤104具体如下:
[0065]
通过逆运动学把避障轨迹转换成机械臂各关节的位置,并把各关节的位置发送到伺服电机,控制机械臂运动实现动态实时避障。该伺服电机设置在机械臂的关节处,用于控制该关节连接的两节子机械臂之间的夹角θ,如图2所示。本发明实施例通过逆运动学把避障轨迹转换成机械臂各关节的位置,通过调节各关节的位置实现避障,无需改变机械臂末端的位姿。
[0066]
实施例2
[0067]
本发明实施例2提供一种基于非接触式电子皮肤的机械臂控制系统,所述控制系统应用于实施例1的控制方法,所述控制系统包括:
[0068]
距离信息获取模块,用于获取安装在机械臂上的每个非接触式电子皮肤测量的距离信息;所述距离信息为非接触电子皮肤所在位置与障碍物的距离。
[0069]
总斥力计算模块,用于根据所述距离信息,计算机械臂所受到的总斥力.
[0070]
避障轨迹获取模块,用于将所述总斥力转换为机械臂的避障轨迹。
[0071]
运动控制模块,用于根据所述避障轨迹控制机械臂运动。
[0072]
对于每个模块的功能的实现方式与实施例1中各步骤的具体实现方式相同,在此不再赘述。
[0073]
实施例3
[0074]
本发明实施例3提供一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述的控制方法。所述电子设备,还包括设置在机械臂上的多个非接触式电子皮肤,多个所述非接触式电子皮肤与所述处理器连接,所述非接触式电子皮肤用于向所述控制器提供执行所述计算机程序时所需的距离信息。
[0075]
实施例4
[0076]
本发明实施例4提供一种计算机可读存储介质,其所述存储介质上存储有计算机程序,所述计算机程序被执行时实现上述的控制方法。
[0077]
根据本发明提供的具体实施例,本发明公开了以下技术效果:
[0078]
本发明使用了非接触式电子皮肤作为感知环境的传感器,避免了视觉传感器的光照问题和遮挡视觉盲区问题。本发明采用的是笛卡尔空间避障,在不改变机械臂末端姿态的情况下进行避障,克服了传统关节避障带来的姿态改变而导致出现不可预知的问题。
[0079]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0080]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的控制方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。