1.本发明涉及一种基于仿生摆动与螺旋桨混合驱动的水下机器人及其工作方法,属于水下仿生机器人技术领域。
背景技术:
2.近年来海洋装备发展迅猛,自主式水下航行器在水下资源勘察、水下救援、水下信息探测等方面发挥了重大作用。随着海洋科技的日益发展,目前包括仿鱼机器人在内的水下仿生机器人也越来越受到国内外研究者的关注。
3.传统的自主式水下航行器以螺旋桨推进器为驱动装置,例如,中国专利文件cn101596931a公布的一种三螺旋桨主动矢量推进的方法,利用三个螺旋桨多方位的主动矢量推进力的有机配合,实现水下航行器前进、后退、转弯以及上浮下潜等各种机动动作。类似的螺旋桨推进式水下航行器通过多个推进器的协同控制来获得较大的载体操控力和力矩以控制其运动,但该类潜器往往体积庞大、功耗大、隐蔽性以及续航能力差。
4.仿鱼设计的水下机器人大多将运动驱动源靠近其尾部,通过设计制作单关节或多关节的舵机或电机驱动联合摆动结构以模拟鱼类的波状游动。例如,中国专利文件cn101033000a公布了一种多关节波动推进鱼形机器人,利用驱动电机连接多级传动连杆模拟鱼类游泳运动时的身体波动运动,并通过胸鳍同步转动实现上浮和下潜功能。该类仿生水下航行器通过身体与鱼鳍的协调配合实现巡游、变速、转向、潜浮等多模态连续动作,与基于螺旋桨推进器的传统水下航行器相比,具有推进效率高、机动灵活性强、隐蔽性好以及对周围环境影响小等优点。虽然仿生设计的方式优势明显,但在复杂环境水域作业时,中小型的仿鱼机器人却容易受到洋流和水环境不稳定因素的影响,同时,受限于仿生推进条件,产生的推进力相对较弱,导致其运动性能相对较差。
5.显然,以上单一推进方式的两类水下航行器都有自身的优缺点,同时二者具有较强的互补性,复合推进方式能够通过取长补短兼顾两种推进方式的优势,同时弱化其各自的缺陷,具有较大的研究和开发价值。例如,中国专利文件cn110588931a公布了一种基于胸鳍与螺旋桨混合推进的水下仿生航行器,以蝠鲼为仿生对象,通过螺旋桨配合胸鳍的协同运动,推进效率和推进速度都有明显提升,且运动更灵活;中国专利文件cn109292061a公布了一种仿生摆动与螺旋桨混合推进的双体水下航行器,结合了仿生摆动式和螺旋桨式推进,通过尾部尾鳍的摆动实现在水平方向上的仿生摆动式推进以及小半径转弯;竖直方向上通过中部前后两个螺旋桨实现快速上浮下潜,提高了航行器上浮下潜时的速度,同时降低了设备整体功耗。
6.鱼类中的飞鱼科在长期生存竞争中形成了一种逃避敌害的高超技能——跃水,海豚也有类似的运动。然而,目前检索到的资料涉及的螺旋桨推进式或仿生摆动式水下航行器大都仅能实现单一的水下的运动,而跨介质的跃水运动是水下机器人高机动行为的重要体现,它能够使机器人具备水面以上目标的跟踪监测功能。因此,研制开发具有高速游动跃
水功能的混合推进式仿鱼机器人,可为提高水下机器人速度和机动性提供新的思路方案和技术途径。需要说明的是,上述内容属于发明人的技术认知范畴,并不必然构成现有技术。
技术实现要素:
7.针对现有技术的不足,本发明提供一种基于仿生摆动与螺旋桨混合驱动的水下机器人及其工作方法,结合了仿生推进的隐蔽性和高机动性以及螺旋桨推进的快速性等优点,配备了一个混合驱动推进系统,同时具有鱼类生物启发的推进器,即驱动鱼鳍,以及传统水下航行器使用的螺旋桨。采用这种解决方案既可以兼顾运动性能和能量消耗,又可以更好地融合两种推进方式的优点。
8.术语解释:
9.1、低速巡游:是指在水域开阔地带缓慢推进,游动速度不超过每秒2倍体长(水下机器人的总长度);
10.2、高游速:是指游动速度为每秒2倍体长以上。
11.本发明采用以下技术方案:
12.一种基于仿生摆动与螺旋桨混合驱动的水下机器人,包括头部组件、胸鳍关节组件、螺旋桨推进器组件、尾部组件四大部分;
13.所述头部组件和尾部组件前端完全密封形成密封舱,胸鳍关节组件和螺旋桨推进器组件防水能够直接暴露在水中,四大部分之间能够进行通信与供电;
14.所述头部组件用于水下机器人的控制和传感,以及控制水下机器人动作,监测运动状态,同时与上位机通讯;
15.所述胸鳍关节组件和尾部组件构成机器人的仿生驱动器,与螺旋桨推进器组件共同构成混合推进系统。配合螺旋桨推进和仿生推进的多种动力形式,可极大提高机体在水中的灵活性和机动性,解决小型水下机器人应用范围小、控制难度大及使用环境要求高的问题,通过挂载不同的监测传感设备可以将其应用在不同的行业和领域。
16.优选的,所述头部组件包括额部外壳、视觉模块、姿态角度传感器、背部外壳、背鳍、电池降压模块、stm32单片机、控制模块安装板、锂电池、电池盒、舵机控制器、额部密封盖板以及补光灯泡;
17.所述头部组件通过电池盒与胸鳍关节组件螺钉固定连接,补光灯泡与视觉模块通过螺钉固定于额部外壳内,并利用额部密封盖板封装;所述姿态角度传感器、电池降压模块、stm32单片机以及舵机控制器利用阳螺柱安装在控制模块安装板上;所述锂电池放置于电池盒内,背部外壳、控制模块安装板以及电池盒自上至下采用螺钉连接形成密封,背鳍螺钉之间固定在背部外壳上;
18.优选的,stm32单片机可选用stm32f103c8t6型,舵机控制器可选用16路pca9685型,用于与上位机通信和控制舵机动作,实现鱼鳍的仿生摆动;
19.所述视觉模块采用openmv视觉模组,配备ov7725摄像头,能够通过openmv视觉模组识别物体并与stm32单片机通信。
20.优选的,所述胸鳍关节组件包括胸鳍关节连接板、两侧的胸鳍关节以及胸鳍关节支撑架;每一胸鳍关节包括外螺纹轴承固定壳套、第一舵机下防水外壳、第一舵机支撑板、第二胸鳍舵机(防水)、第一舵机上防水外壳、胸鳍、胸鳍安装支架、第一胸鳍舵机、外螺纹轴
承和橡胶垫片;
21.所述头部组件的电池盒分别与胸鳍关节连接板、胸鳍关节支撑架螺钉连接,所述胸鳍关节支撑架与螺旋桨推进器组件固定连接;
22.两侧的胸鳍关节前部分别通过其外螺纹轴承固定壳套与胸鳍关节连接板螺钉连接,后部分别通过其第二胸鳍舵机与胸鳍关节支撑架螺钉连接;两侧的胸鳍关节结构以连接方式相同,对于一侧的胸鳍关节,第一胸鳍舵机通过螺钉固定在第一舵机支撑板上,与第一舵机上防水外壳、第一舵机下防水外壳通过螺钉固定形成密封的防水外壳;防水外壳前端安装有外螺纹轴承,外螺纹轴承和橡胶垫片外套有外螺纹轴承固定壳套;防水外壳后侧通过螺钉与第二胸鳍舵机的金属舵盘固连;所述第一胸鳍舵机的金属舵盘通过螺钉与胸鳍安装支架固连,所述胸鳍安装支架通过螺钉连接胸鳍;
23.第一胸鳍舵机下防水外壳一端连接第二胸鳍舵机的金属舵盘,另一端通过外螺纹轴承配合橡胶垫片安装在外螺纹轴承固定壳套内,两侧胸鳍关节的外螺纹轴承固定壳套由胸鳍关节连接板连接,第二胸鳍舵机转动时,外螺纹轴承内圈转动,进而整个第一胸鳍舵机(包含外壳)转动;
24.优选的,第二胸鳍舵机为大扭矩防水舵机,第一胸鳍舵机为普通舵机,每一胸部关节的两个自由度分别由第一胸鳍舵机和第二胸鳍舵机提供,即第一胸鳍舵机、第二胸鳍舵机各两个,分别用于控制左右胸鳍关节的摆动和偏转。单关节双自由度的胸部关节结构使得机器人能够通过胸鳍摆动轻易的实现滚转、俯仰、偏航以改变不同的姿态,具有较高的机动灵活性。
25.优选的,所述螺旋桨推进器组件包括螺旋桨推进器支撑架、潜浮螺旋桨推进器和两侧螺旋桨推进器;
26.所述胸鳍关节支撑架与螺旋桨推进器支撑架螺钉连接;所述潜浮螺旋桨推进器和两侧螺旋桨推进器均由7.4v直流微型电机驱动,三个螺旋桨推进器是一样的,每个螺旋桨推进器均由一个水下7.4v直流微型电机和一个螺旋桨片组成,7.4v直流微型电机由电机控制器控制,电机控制器与stm32单片机连接通讯;电机控制器选用l298n型,与stm32单片机连接通讯,控制电机正反转转速,通过多个螺旋桨推进器的相互配合可以快速实现机器人位姿的改变;
27.所述潜浮螺旋桨推进器安装在螺旋桨推进器支撑架中间,利用盖板和螺钉固定,7.4v直流微型电机的输出轴垂直于躯干所在平面,该电机可以提供垂直方向上的驱动力,通过正反转实现驱动力方向改变,实现上浮下潜;两侧螺旋桨推进器分别安装在螺旋桨推进器支撑架两侧,用金属电机固定圈和螺钉固定,7.4v直流微型电机的输出轴与躯干的轴向平行,这两个电机可以提供水平面方向的驱动力,通过正反转实现驱动力方向改变,实现前进后退;通过两侧电机差速转动实现转弯。
28.优选的,所述尾部组件包括偏转电机密封舱、偏转电机密封舱盖、尾鳍舵机连接板、电机控制器密封壳、尾鳍、尾鳍舵机、电机控制器固定板、尾部过渡连接板、偏转电机连接件、偏转电机和电机控制器;
29.所述螺旋桨推进器组件的螺旋桨推进器支撑架与偏转电机密封舱螺钉连接;
30.所述偏转电机输出轴连接偏转电机连接件,通过螺钉固定在偏转电机密封舱内,并与偏转电机密封舱盖形成密封;所述尾部过渡连接板前后分别与偏转电机连接件和电机
控制器固定板螺钉连接;所述电机控制器通过阳螺柱和螺钉固定在电机控制器固定板上,电机控制器密封壳与电机控制器固定板利用螺钉固连形成密封,电机控制器分别与潜浮螺旋桨推进器和两侧螺旋桨推进器连接,用来控制潜浮螺旋桨推进器和两侧螺旋桨推进器联合运动;所述尾鳍利用螺钉固定在尾鳍舵机上,尾鳍舵机接板通过螺钉连接电机控制器密封壳和尾鳍舵机的金属舵盘;
31.优选的,尾部舵机为大扭矩防水双轴舵机,末端固连尾鳍,通过仿生摆动产生向前的推力。
32.优选的,所述额部外壳、背部外壳、控制模块安装板、额部密封盖板、第一舵机下防水外壳、第一舵机支撑板、第一舵机上防水外壳、胸鳍、螺旋桨推进器支撑架、偏转电机密封舱、偏转电机密封舱盖、尾部过渡连接板、电机控制器固定板、电机控制器密封壳、尾鳍以及尾鳍舵机连接板均采用abs塑料或树脂3d打印加工而成;所述电池盒、胸鳍关节连接板、胸鳍关节支撑板、胸鳍安装支架以及偏转电机连接件均采用1060铝合金材料3d打印加工而成。
33.本发明所涉及的所有密封处均采用相应尺寸的橡胶垫圈,同时在外壳采用防水胶做进一步防水密封处理。
34.一种上述的基于仿生摆动与螺旋桨混合驱动的水下机器人的工作方法,水下机器人的控制模块包括上位机、stm32单片机、舵机控制器以及电机控制器;监测用的传感器为姿态角度传感器,能同时检测三轴加速度、三轴角速度的运动数据以及温度数据,基于不同的工作要求可选用多种传感器(如温度传感器、深度传感器、水质检测传感器等);视觉模块的摄像机搭配补光灯泡照明装置用于拍摄并识别到水下的实时画面;
35.水下机器人工作时,通过开启背部外壳上的电源开关使得电池盒内锂电池直接为水下机器人的控制模块供电,锂电池接电池降压模块输出低电压为补光灯泡供电;控制模块以stm32单片机为核心,对传感器收集的数据进行分析并传输;stm32单片机连接有舵机控制器和电机控制器,舵机控制器用来控制第一胸鳍舵机、第二胸鳍舵机和尾鳍舵机的联合运动,电机控制器控制潜浮螺旋桨推进器和两侧螺旋桨推进器联合运动,二者配合实现仿生水下机器人的多模态运动以及姿态的调整;
36.在正常运行中,利用姿态传感器(imu姿态传感器)实时检测水下机器人的姿态信息,一方面检测其是否出现翻转等异常姿态现象,另一方面检测其目前的运动状态是否与控制要求相一致;当视觉模块的摄像头测扫到前方有障碍物时,进行信息处理并将信息发送给stm32单片机,stm32单片机将重新计算规划的路径信息发送给舵机控制器和电机控制器,带动各舵机和螺旋桨推进器改变运动状态;所述stm32单片机包括无线通信模块,能够随时与上位机交互通信,反馈设备运动状态。
37.优选的,当水下机器人在水下执行低速巡游运动时,单独采用仿生摆动驱动系统,仅使用胸鳍关节组件和尾部组件作为驱动器,该状态下具有高机动灵活性,同时能够节省电池功耗;
38.由stm32单片机控制舵机控制器发出指令,第二胸鳍舵机的舵盘转动带动第一舵机防水外壳沿舵机旋转中轴线摆动,第一胸鳍舵机的转动带动两侧胸鳍安装支架运动,进而使两侧胸鳍摆动拍击水流,使水下机器人获得一定的反作用推进力;当第二胸鳍舵机运转而第一胸鳍舵机不运转时,胸鳍连同其防水外壳一起转动,实现绕躯干轴向的摆动动作;
当第一胸鳍舵机运转而第二胸鳍舵机不运转时,左、右胸鳍实现绕垂直于躯干轴向的摆动动作;当第一胸鳍舵机与第二胸鳍舵机分别运转时,胸鳍实现绕沿躯干轴向和垂直于躯干轴向的拍动与摆动的复合动作;
39.进一步,通过舵机控制器控制尾鳍舵机的转动角度最大值以控制尾鳍的摆动幅度,从而控制机器人的游动速度,尾鳍摆动幅度越大,获得的推进力越大,机器人的前进速度越快;转弯时,控制尾鳍舵机非对称摆动,同时第一胸鳍舵机、第二胸鳍舵机带动胸鳍完成高自由度运动使其保持相对平衡,从而保证水下机器人自身姿态稳定,尽可能减少视觉模块的镜头的晃动,使操控更加精准;通过采用双自由度的胸鳍结构(左右胸鳍关节各具有两个自由度,分别由第一胸鳍舵机、第二胸鳍舵机提供),使得水下机器人具备更高的机动性能,配合尾鳍摆动能够实现其在空间中的滑翔、巡游、变速、转弯复杂的空间运动。
40.优选的,当仿生水下机器人需要瞬时动力输出、快速下潜或处于复杂水下环境时,单独采用螺旋桨驱动系统,便于提升驱动力;
41.所述螺旋桨推进器组件包括两个能够提供沿机体轴线方向上的力、结构对称的螺旋桨推进器,以及一个提供垂直与机体方向上力的潜浮螺旋桨推进器;当两侧螺旋桨推进器的螺旋桨以相同的转速同向顺向旋转时,两侧推进器同时向后推动,提供较大的向前的反作用推进力,水下机器人前运动;同时逆向推动时,水下机器人反向运动;当两侧螺旋桨推进器的螺旋桨反向旋转时,水下机器人实现两侧转向运动;水下机器人的重心和浮心经过配平,保持在一条沿重力方向的直线上,浮心位置略高于重心位置,静止状态下浸没与水中具有一个很小的净浮力;当水下机器人进行上浮下潜运动时,由电机控制器发出指令,控制潜浮螺旋桨推进器正转得到一个向下的推进力,实现下潜运动,反转则实现上浮运动;通过潜浮螺旋桨推进器的正反转可以使仿生水下机器人实现快速的上浮下潜运动。
42.优选的,高游速是水下机器人能跃出水面的是关键,当螺旋桨推进器组件和胸鳍关节组件、尾部组件同时工作时,水下机器人具有较大驱动力,能够获得更高的游动速度;此时,所述偏转电机带动偏转电机连接件转动,进而带动尾部组件整体转动,旋转90度调整尾部姿态,使水下机器人切换至豚式游动模式,此时尾鳍配合胸鳍摆动可获得合适的俯仰角,两侧螺旋桨推进器提供推进力,提高游动速度,从而使水下机器人能够跃出水面,当其跃出水面时胸鳍关节展平以保持较大的翼展作滑翔状运动。
43.两套驱动系统同时工作能够获得更大的运动速度,但与此同时电池的消耗会激增,因此,为增加水下的作业时间,应尽量避免同时使用两种驱动系统。此外,在水下运动时,可根据仿生水下机器人在水中不同的姿态角度进行闭环动态调节,控制不同驱动器可以协调运动,可实现一键姿态水平、一键快速下潜至指定深度等功能,其中闭环动态调节是指采用pid闭环控制策略可有效地纠正被控制对象的偏差,从而使其达到一个稳定的状态。当水下机器人遇到障碍物或受到浪涌作用等自身姿态变化时,头部组件内的控制模块立刻发出控制指令调节动作,从而保证装置自身姿态稳定,在其巡游或稳定状态下尽可能减少镜头的晃动,进一步的根据不同运动状态下镜头的拍摄视角和晃动程度调整控制指令,实现动态调节。即:出现状态偏差
→
信号监测
→
信号处理
→
生产控制信号
→
驱动机构运动
→
消除状态偏差的过程,是一个闭环过程。
44.总体来看,本发明控制各仿生鳍驱动舵机的摆动频率和角度,以及螺旋桨驱动电机的转速和方向,使仿生摆动和螺旋桨驱动相互配合来精确控制航行器的运动姿态。通过
与仿生鱼鳍与螺旋桨推进器的结合,从而保证鱼的多模态高效正常运动,同时也丰富了仿生学相应的研究内容。
45.本发明的水下机器人当其处于静水域水平面游动时,可采用单尾鳍驱动模式,胸鳍可保持一定角度静止以辅助水下滑翔,便于节省电池功耗;当水下机器人需要实现空间运动或调整姿态时,两侧胸鳍可配合尾鳍摆动实现灵活的运动调整;当水下机器人需要瞬时动力输出、快速下潜或处于复杂水下环境时,可打开传统螺旋桨驱动器便于提升驱动力;当水下机器人需要跃出水面时,尾部的偏转关节工作使其切换为豚式摆动模式,配合两侧驱动螺旋桨可获得较大的俯仰角和较高的推进速度,当其跃出水面时胸鳍关节立即展平保持较大的翼展作滑翔状运动。
46.本发明的水下机器人采用闭环动态调节控制算法,根据水中不同的姿态角度来进行调节,降低操作员的控制难度,同时提供丰富传感器外设接口(外设接口可设置在stm32单片机上),可灵活搭载各类水下信息探测传感器(外设接口可连接各种用于采集的监测传感器,如水质监测传感器,可暴露于设备外部),通过自身的无线蓝牙通信模块(stm32单片机具有蓝牙串口,可接普通bt04蓝牙模块,可直接放置于头部组件内stm32单片机上部)与上位机实时通信,保证信息及时有效。本发明为水下装备的设计开发提供了新的借鉴思路,具有较大的应用前景。
47.本发明中未详尽之处,均可采用现有技术进行。
48.本发明的有益效果为:
49.(1)本发明涉及的仿生水下机器人外观和运动形态与实际鱼类相似,两侧胸鳍以及尾鳍分别由舵机驱动,通过仿生摆动可直接为其提供向前的推力,与螺旋桨推进的航行器相比,推进效率有明显提高,对环境扰动小,且运动更灵活;螺旋桨推进器使机器人能快速的转移到目标位置,与仅采用胸鳍推进的航行器相比,推进速度等运动性能有明显提高。
50.(2)本发明涉及的仿生水下机器人采用分组模块化设计,分为头部组件、胸鳍关节组件、螺旋桨推进器组件、尾部组件四部分,各部分之间结构紧凑简单、拆装方便,使后续设备维修及升级更为简便;头部组件中包含视觉模块,能够更全面的获得周围环境信息。
51.(3)本发明可以进行高速游动跃水运动,实现水面以上目标的搜索跟踪任务,扩大了水下机器人的使用范围。同时,可以为鱼类运动的游动特性、水下潜器的运动控制方法等研究提供实验平台,对制造高效率、低能耗、高机动灵活性、对环境扰动小的水下探测设备具有重要的指导和借鉴意义。
附图说明
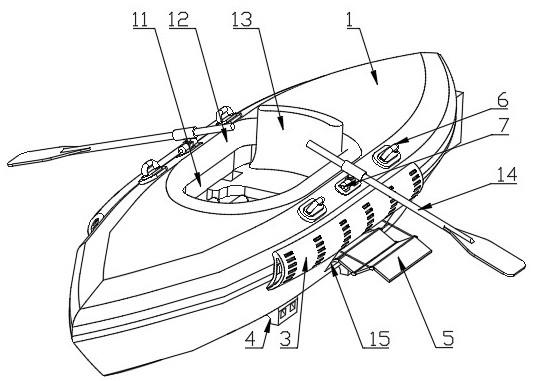
52.图1为本发明的总体结构示意图;
53.图2为本发明的侧视中间截面结构示意图;
54.图3为本发明的俯视结构示意图;
55.图4为本发明的摆动胸部结构示意图;
56.图5为本发明的驱动器自由度示意图;
57.图6为本发明的总体工作方式示意图;
58.其中,
ⅰ‑
头部组件、
ⅱ‑
胸鳍关节组件、
ⅲ‑
螺旋桨推进器组件、
ⅳ‑
尾部组件、1-额部外壳、2-背部外壳、3-背鳍、4-控制模块安装板、5-螺旋桨推进器支撑架、6-偏转电机密封
舱、7-偏转电机密封舱盖、8-尾鳍舵机连接板、9-电机控制器密封壳、10-尾鳍、11-尾鳍舵机、12-电机控制器固定板、13-尾部过渡连接板、14-偏转电机连接件、15-潜浮螺旋桨推进器、16-电池盒、17-锂电池、18-额部密封盖板、19-补光灯泡、20-视觉模块、21-姿态角度传感器、22-电池降压模块、23-stm32单片机、24-舵机控制器、25-两侧旋桨推进器、26-偏转电机、27-电机控制器、28-胸鳍关节连接板、29-胸鳍关节、29-1-第一舵机下防水外壳、29-2-第一胸鳍舵机、29-3-第二胸鳍舵机、29-4-第一舵机上防水外壳、29-5-胸鳍、29-6-胸鳍安装支架、29-7-第一舵机支撑板、29-8-外螺纹轴承、29-9-外螺纹轴承固定壳套、29-10橡胶垫片、30-胸鳍关节支撑架。
具体实施方式:
59.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述,但不仅限于此,本发明未详尽说明的,均按本领域常规技术。
60.实施例1:
61.一种基于仿生摆动与螺旋桨混合驱动的水下机器人,如图1-6所示,包括头部组件ⅰ、胸鳍关节组件ⅱ、螺旋桨推进器组件ⅲ、尾部组件ⅳ四大部分;
62.头部组件ⅰ和尾部组件ⅳ前端完全密封形成密封舱,胸鳍关节组件ⅱ和螺旋桨推进器组件ⅲ防水能够直接暴露在水中,四大部分之间能够进行通信与供电;
63.头部组件ⅰ用于水下机器人的控制和传感,以及控制水下机器人动作,监测运动状态,同时与上位机通讯;
64.胸鳍关节组件ⅱ和尾部组件ⅳ构成机器人的仿生驱动器,与螺旋桨推进器组件共同构成混合推进系统。配合螺旋桨推进和仿生推进的多种动力形式,可极大提高机体在水中的灵活性和机动性,解决小型水下机器人应用范围小、控制难度大及使用环境要求高的问题,通过挂载不同的监测传感设备可以将其应用在不同的行业和领域。
65.实施例2:
66.一种基于仿生摆动与螺旋桨混合驱动的水下机器人,如实施例1所述,所不同的是,头部组件ⅰ包括额部外壳1、视觉模块20、姿态角度传感器21、背部外壳2、背鳍3、电池降压模块22、stm32单片机23、控制模块安装板4、锂电池17、电池盒16、舵机控制器24、额部密封盖板18以及补光灯泡19;
67.头部组件ⅰ通过电池盒16与胸鳍关节组件ⅱ螺钉固定连接,补光灯泡19与视觉模块20通过螺钉固定于额部外壳1内,并利用额部密封盖板18封装;姿态角度传感器21、电池降压模块22、stm32单片机23以及舵机控制器24利用阳螺柱安装在控制模块安装板4上;锂电池17放置于电池盒16内,背部外壳2、控制模块安装板4以及电池盒16自上至下采用螺钉连接形成密封,背鳍螺钉之间固定在背部外壳上;
68.优选的,stm32单片机23可选用stm32f103c8t6型,舵机控制器24可选用16路pca9685型,用于与上位机通信和控制舵机动作,实现鱼鳍的仿生摆动;
69.视觉模块20采用openmv视觉模组,配备ov7725摄像头,能够通过openmv视觉模组识别物体并与stm32单片机通信。
70.实施例3:
71.一种基于仿生摆动与螺旋桨混合驱动的水下机器人,如实施例2所述,所不同的
是,胸鳍关节组件包括胸鳍关节连接板28、两侧的胸鳍关节29以及胸鳍关节支撑架30;每一胸鳍关节包括外螺纹轴承固定壳套29-2、第一舵机下防水外壳29-1、第一舵机支撑板29-7、第二胸鳍舵机29-3(防水)、第一舵机上防水外壳29-4、胸鳍29-5、胸鳍安装支架29-6、第一胸鳍舵机29-2、外螺纹轴承29-8和橡胶垫片29-10;
72.头部组件的电池盒16分别与胸鳍关节连接板28、胸鳍关节支撑架30螺钉连接,胸鳍关节支撑架30与螺旋桨推进器组件ⅲ固定连接;
73.两侧的胸鳍关节29前部分别通过其外螺纹轴承固定壳套29-9与胸鳍关节连接板28螺钉连接,后部分别通过其第二胸鳍舵机29-3与胸鳍关节支撑架30螺钉连接;两侧的胸鳍关节结构以连接方式相同,对于一侧的胸鳍关节,第一胸鳍舵机29-2通过螺钉固定在第一舵机支撑板29-7上,与第一舵机上防水外壳29-4、第一舵机下防水外壳29-1通过螺钉固定形成密封的防水外壳;防水外壳前端安装有外螺纹轴承29-8,外螺纹轴承29-8和橡胶垫片29-10外套有外螺纹轴承固定壳套29-9;防水外壳后侧通过螺钉与第二胸鳍舵机29-3的金属舵盘固连;所述第一胸鳍舵机29-2的金属舵盘通过螺钉与胸鳍安装支架29-6固连,所述胸鳍安装支架29-6通过螺钉连接胸鳍29-5;
74.第一舵机下防水外壳29-1一端连接第二胸鳍舵机29-的金属舵盘,另一端通过外螺纹轴承29-8配合橡胶垫片29-10安装在外螺纹轴承固定壳套29-9内,两侧胸鳍关节的外螺纹轴承固定壳套由胸鳍关节连接板连接,第二胸鳍舵机29-3转动时,外螺纹轴承29-8内圈转动,进而整个第一胸鳍舵机(包含外壳)转动;
75.优选的,第二胸鳍舵机29-3为大扭矩防水舵机,第一胸鳍舵机29-2为普通舵机,每一胸部关节的两个自由度分别由第一胸鳍舵机和第二胸鳍舵机提供,即第一胸鳍舵机、第二胸鳍舵机各两个,分别用于控制左右胸鳍关节的摆动和偏转。单关节双自由度的胸部关节结构使得机器人能够通过胸鳍摆动轻易的实现滚转、俯仰、偏航以改变不同的姿态,具有较高的机动灵活性。
76.实施例4:
77.一种基于仿生摆动与螺旋桨混合驱动的水下机器人,如实施例3所述,所不同的是,螺旋桨推进器组件ⅲ包括螺旋桨推进器支撑架5、潜浮螺旋桨推进器15和两侧螺旋桨推进器25;
78.胸鳍关节支撑架30与螺旋桨推进器支撑架5螺钉连接;潜浮螺旋桨推进器15和两侧螺旋桨推进器25均由7.4v直流微型电机驱动,三个螺旋桨推进器是一样的,每个螺旋桨推进器均由一个水下7.4v直流微型电机和一个螺旋桨片组成,7.4v直流微型电机由电机控制器控制,电机控制器与stm32单片机连接通讯;电机控制器选用l298n型,与stm32单片机连接通讯,控制电机正反转转速,通过多个螺旋桨推进器的相互配合可以快速实现机器人位姿的改变;
79.潜浮螺旋桨推进器15安装在螺旋桨推进器支撑架5中间,利用盖板和螺钉固定,7.4v直流微型电机的输出轴垂直于躯干所在平面,该电机可以提供垂直方向上的驱动力,通过正反转实现驱动力方向改变,实现上浮下潜;两侧螺旋桨推进器25分别安装在螺旋桨推进器支撑架5两侧,用金属电机固定圈和螺钉固定,7.4v直流微型电机的输出轴与躯干的轴向平行,这两个电机可以提供水平面方向的驱动力,通过正反转实现驱动力方向改变,实现前进后退;通过两侧电机差速转动实现转弯。
80.实施例5:
81.一种基于仿生摆动与螺旋桨混合驱动的水下机器人,如实施例4所述,所不同的是,尾部组件包括偏转电机密封舱6、偏转电机密封舱盖7、尾鳍舵机连接板8、电机控制器密封壳9、尾鳍10、尾鳍舵机11、电机控制器固定板12、尾部过渡连接板13、偏转电机连接件14、偏转电机26和电机控制器27;
82.螺旋桨推进器组件的螺旋桨推进器支撑架5与偏转电机密封舱6螺钉连接;
83.偏转电机26输出轴连接偏转电机连接件14,通过螺钉固定在偏转电机密封舱6内,并与偏转电机密封舱盖7形成密封;尾部过渡连接板13前后分别与偏转电机连接件14和电机控制器固定板12螺钉连接;电机控制器27通过阳螺柱和螺钉固定在电机控制器固定板12上,电机控制器密封壳9与电机控制器固定板12利用螺钉固连形成密封,电机控制器27分别与潜浮螺旋桨推进器15和两侧螺旋桨推进器25连接,用来控制潜浮螺旋桨推进器15和两侧螺旋桨推进器25联合运动;尾鳍10利用螺钉固定在尾鳍舵机11上,尾鳍舵机接板8通过螺钉连接电机控制器密封壳9和尾鳍舵机11的金属舵盘;
84.优选的,尾部舵机为大扭矩防水双轴舵机,末端固连尾鳍,通过仿生摆动产生向前的推力。
85.实施例6:
86.一种基于仿生摆动与螺旋桨混合驱动的水下机器人,如实施例5所述,所不同的是,额部外壳1、背部外壳2、控制模块安装板4、额部密封盖板18、第一舵机下防水外壳29-1、第一舵机支撑板29-7、第一舵机上防水外壳29-4、胸鳍29-5、螺旋桨推进器支撑架5、偏转电机密封舱6、偏转电机密封舱盖7、尾部过渡连接板13、电机控制器固定板12、电机控制器密封壳9、尾鳍10以及尾鳍舵机连接板8均采用abs塑料或树脂3d打印加工而成;电池盒16、胸鳍关节连接板28、胸鳍关节支撑板30、胸鳍安装支架29-6以及偏转电机连接14件均采用1060铝合金材料3d打印加工而成。
87.本发明所涉及的所有密封处均采用相应尺寸的橡胶垫圈,同时在外壳采用防水胶做进一步防水密封处理。
88.实施例7:
89.一种基于仿生摆动与螺旋桨混合驱动的水下机器人的工作方法,水下机器人的控制模块包括上位机(未示出)、stm32单片机23、舵机控制器24以及电机控制器27;监测用的传感器为姿态角度传感器21,能同时检测三轴加速度、三轴角速度的运动数据以及温度数据,基于不同的工作要求可选用多种传感器(如温度传感器、深度传感器、水质检测传感器等);视觉模块20的摄像机搭配补光灯泡19照明装置用于拍摄并识别到水下的实时画面;
90.如图6所示,水下机器人工作时,通过开启背部外壳2上的电源开关使得电池盒16内锂电池17直接为水下机器人的控制模块供电,锂电池17接电池降压模块22输出低电压为补光灯泡19供电;控制模块以stm32单片机23为核心,对传感器收集的数据进行分析并传输;stm32单片机23连接有舵机控制器24和电机控制器27,舵机控制器24用来控制第一胸鳍舵机、第二胸鳍舵机和尾鳍舵机的联合运动,电机控制器27控制潜浮螺旋桨推进器15和两侧螺旋桨推进器25联合运动,二者配合实现仿生水下机器人的多模态运动以及姿态的调整;
91.图6中,鱼鳍舵机是指第一胸鳍舵机29-1、第二胸鳍舵机29-3和尾鳍舵机11,螺旋
桨电机指7.4v直流微型电机。
92.在正常运行中,利用姿态传感器21(imu姿态传感器)实时检测水下机器人的姿态信息,一方面检测其是否出现翻转等异常姿态现象,另一方面检测其目前的运动状态是否与控制要求相一致;当视觉模块20的摄像头测扫到前方有障碍物时,进行信息处理并将信息发送给stm32单片机23,stm32单片机23将重新计算规划的路径信息发送给舵机控制器24和电机控制器27,带动各舵机和螺旋桨推进器改变运动状态;所述stm32单片机23包括无线通信模块,能够随时与上位机交互通信,反馈设备运动状态。
93.实施例8:
94.一种基于仿生摆动与螺旋桨混合驱动的水下机器人的工作方法,如实施例7所述,所不同的是,当水下机器人在水下执行低速巡游运动时,单独采用仿生摆动驱动系统,仅使用胸鳍关节组件和尾部组件作为驱动器,该状态下具有高机动灵活性,同时能够节省电池功耗;
95.由stm32单片机23控制舵机控制器24发出指令,第二胸鳍舵机29-3的舵盘转动带动第一舵机防水外壳沿舵机旋转中轴线摆动,第一胸鳍舵机29-2的转动带动两侧胸鳍安装支架29-6运动,进而使两侧胸鳍29-5摆动拍击水流,使水下机器人获得一定的反作用推进力;当第二胸鳍舵机29-3运转而第一胸鳍舵机29-2不运转时,胸鳍29-5连同其防水外壳一起转动,实现绕躯干轴向的摆动动作;当第一胸鳍舵机29-2运转而第二胸鳍舵机29-3不运转时,左、右胸鳍29-5实现绕垂直于躯干轴向的摆动动作;当第一胸鳍舵机与第二胸鳍舵机分别运转时,胸鳍实现绕沿躯干轴向和垂直于躯干轴向的拍动与摆动的复合动作;
96.进一步,通过舵机控制器24控制尾鳍舵机11的转动角度最大值以控制尾鳍10的摆动幅度,从而控制机器人的游动速度,尾鳍10摆动幅度越大,获得的推进力越大,机器人的前进速度越快;转弯时,控制尾鳍舵机11非对称摆动,同时第一胸鳍舵机、第二胸鳍舵机带动胸鳍完成高自由度运动使其保持相对平衡,从而保证水下机器人自身姿态稳定,尽可能减少视觉模块20的镜头的晃动,使操控更加精准;通过采用双自由度的胸鳍结构(左右胸鳍关节各具有两个自由度,分别由第一胸鳍舵机、第二胸鳍舵机提供),使得水下机器人具备更高的机动性能,配合尾鳍摆动能够实现其在空间中的滑翔、巡游、变速、转弯复杂的空间运动。
97.实施例9:
98.一种基于仿生摆动与螺旋桨混合驱动的水下机器人的工作方法,如实施例7所述,所不同的是,当仿生水下机器人需要瞬时动力输出、快速下潜或处于复杂水下环境时,单独采用螺旋桨驱动系统,便于提升驱动力;
99.所述螺旋桨推进器组件包括两个能够提供沿机体轴线方向上的力、结构对称的螺旋桨推进器25,以及一个提供垂直与机体方向上力的潜浮螺旋桨推进器15;当两侧螺旋桨推进器的螺旋桨以相同的转速同向顺向旋转时,两侧推进器同时向后推动,提供较大的向前的反作用推进力,水下机器人前运动;同时逆向推动时,水下机器人反向运动;当两侧螺旋桨推进器的螺旋桨反向旋转时,水下机器人实现两侧转向运动;水下机器人的重心和浮心经过配平,保持在一条沿重力方向的直线上,浮心位置略高于重心位置,静止状态下浸没与水中具有一个很小的净浮力;当水下机器人进行上浮下潜运动时,由电机控制器发出指令,控制潜浮螺旋桨推进器15正转得到一个向下的推进力,实现下潜运动,反转则实现上浮
运动;通过潜浮螺旋桨推进器15的正反转可以使仿生水下机器人实现快速的上浮下潜运动。
100.实施例10:
101.一种基于仿生摆动与螺旋桨混合驱动的水下机器人的工作方法,如实施例7所述,所不同的是,高游速是水下机器人能跃出水面的是关键,当螺旋桨推进器组件和胸鳍关节组件、尾部组件同时工作时,水下机器人具有较大驱动力,能够获得更高的游动速度;此时,所述偏转电机26带动偏转电机连接件14转动,进而带动尾部组件整体转动,旋转90度调整尾部姿态,使水下机器人切换至豚式游动模式,此时尾鳍配合胸鳍摆动可获得合适的俯仰角,两侧螺旋桨推进器25提供推进力,提高游动速度,从而使水下机器人能够跃出水面,当其跃出水面时胸鳍关节展平以保持较大的翼展作滑翔状运动。
102.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。