一种模块化轻x型中频伺服机器人点焊枪
技术领域
1.本实用新型涉及焊枪技术领域,具体为一种模块化轻x型中频伺服机器人点焊枪。
背景技术:
2.焊枪是一种用于金属材质的零部件焊接的工具,在焊接的过程中,执行焊接操作的部分,在用于汽车板件、航天航空、船舶制造等电阻点焊的机械装置时,焊枪过电极施加压力并压紧在两柱状电极之间,利用直流电通过接头的接触面及邻近区域产生的电阻热并熔化母材金属,形成焊点的电阻焊接流程,目前多采用机器人自动操作的焊接设备进行对焊枪的使用,降低了人工成本,而现有的用于器人的点焊枪,采用单轴承的设计对焊臂进行支撑,容易在焊枪电极滑动时引起电流分流,导致焊点毛刺多,且焊枪的主体结构体积较大,重量高,不便于对其进行模块化进行生产使用。
3.所以我们提出了一种模块化轻x型中频伺服机器人点焊枪,以便于解决上述中提出的问题。
技术实现要素:
4.本实用新型的目的在于提供一种模块化轻x型中频伺服机器人点焊枪,以解决上述背景技术提出的目前市场上现有的用于器人的点焊枪,采用单轴承的设计对焊臂进行支撑,容易在焊枪电极滑动时引起电流分流,导致焊点毛刺多,且焊枪的主体结构体积较大,重量高,不便于对其进行模块化进行生产使用的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种模块化轻x型中频伺服机器人点焊枪,包括焊枪支撑架、转动中轴、动焊臂、焊枪动电极和电极帽,所述焊枪支撑架的中部安装有转动中轴,所述转动中轴上安装有动焊臂,所述动焊臂上安装有焊枪动电极,所述焊枪动电极上安装有电极帽。
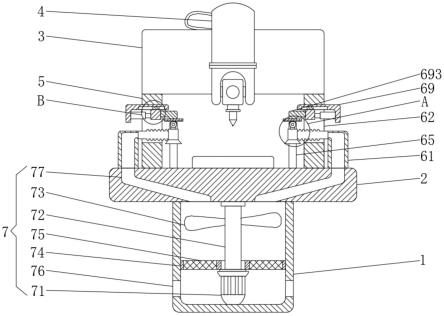
6.优选的,所述转动中轴,包括锁紧螺栓头、锁紧螺栓杆、中轴外壳、锁紧螺母、中轴挡片、防尘垫圈、轴承和轴承垫圈,所述锁紧螺栓头安装在锁紧螺栓杆的左侧,所述锁紧螺栓杆的外侧设置有中轴外壳,所述中轴外壳与锁紧螺栓杆之间为滑动关系,所述锁紧螺栓杆的右端与锁紧螺母螺纹相连,所述中轴外壳的外侧安装有轴承,所述轴承的外侧安装有轴承垫圈,轴承可插入至轴承垫圈的内部,所述轴承和轴承垫圈在中轴外壳上同时分布有两个,轴承的外侧安装有防尘垫圈,所述防尘垫圈的外侧设置有中轴挡片。
7.优选的,所述焊枪支撑架的右端下侧固定安装有静焊臂,静焊臂的固定方向与动焊臂的初始方向相同,所述静焊臂上安装有焊枪静电极,所述焊枪静电极的上端安装有电极帽,焊枪静电极位于焊枪动电极的正下侧,所述焊枪静电极的内部开设有冷却水槽,冷却水槽的外端连接有输水管,所述输水管通过防水接头连接至焊枪支撑架上,接头连接在焊枪支撑架的内部与水划板相连通,所述水划板通过输水管与动焊臂内部的冷却水槽相连通,通过水冷对动焊臂和静焊臂进行冷却。
8.优选的,所述焊枪支撑架的顶部安装有折返式电缸,所述折返式电缸通过推动杆
与动焊臂相连,通过推动杆的作用使动焊臂在转动中轴上转动。
9.优选的,所述焊枪支撑架的内部固定有中频变压器,所述中频变压器的顶部与折返式电缸电性相连,中频变压器的左端与静焊臂导电块和动焊臂导电块分别电性相连,静焊臂导电块和动焊臂导电块均位于焊枪支撑架的内部内,所述静焊臂导电块的另一端与静焊臂相连,所述动焊臂导电块的另一端通过软连接与动焊臂相连。
10.优选的,所述焊枪支撑架的中部外侧安装有挂架板,所述挂架板与焊枪支撑架之间通过螺栓进行固定,挂架板的右侧面上安装有安装法兰。
11.与现有技术相比,本实用新型的有益效果是:该模块化轻x型中频伺服机器人点焊枪,
12.(1)设置有转动中轴,转动中轴采用组合轴承,提高了转动中轴对动焊臂的支撑稳定性,可以降低动焊臂转动对电流的影响,弥补了现有的焊枪电极滑动引起的分流,降低了焊点毛刺多而引起产品不良的现象,增加了该装置对动焊臂的调节效果;
13.(2)设置有焊枪支撑架,通过合理的布局,使焊枪支撑架对焊枪的各个部件进行紧密安装,使该焊枪结构紧凑并减少二次回路导电部分的长度,从而增大了焊枪的模块化利用率、成本降低、重量轻、降低次级回路损耗,有利于对该焊枪进行模块化生产。
附图说明
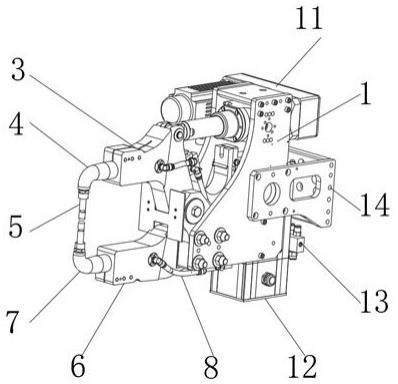
14.图1为本实用新型外观结构示意图;
15.图2为本实用新型爆炸结构示意图;
16.图3为本实用新型正视结构示意图;
17.图4为本实用新型转动中轴爆炸结构示意图。
18.图中:1、焊枪支撑架;2、转动中轴;201、锁紧螺栓头;202、锁紧螺栓杆;203、中轴外壳;204、锁紧螺母;205、中轴挡片;206、防尘垫圈;207、轴承;208、轴承垫圈;3、动焊臂;4、焊枪动电极;5、电极帽;6、静焊臂;7、焊枪静电极;8、输水管;9、静焊臂导电块;10、动焊臂导电块;11、折返式电缸;12、中频变压器;13、水划板;14、挂架板。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参阅图1-4,本实用新型提供一种技术方案:一种模块化轻x型中频伺服机器人点焊枪,包括焊枪支撑架1、转动中轴2、动焊臂3、焊枪动电极4、电极帽5、静焊臂6、焊枪静电极7、输水管8、静焊臂导电块9、动焊臂导电块10、折返式电缸11、中频变压器12、水划板13和挂架板14,焊枪支撑架1的中部安装有转动中轴2,转动中轴2上安装有动焊臂3,动焊臂3上安装有焊枪动电极4,焊枪动电极4上安装有电极帽5。
21.转动中轴2,包括锁紧螺栓头201、锁紧螺栓杆202、中轴外壳203、锁紧螺母204、中轴挡片205、防尘垫圈206、轴承207和轴承垫圈208,锁紧螺栓头201安装在锁紧螺栓杆202的左侧,锁紧螺栓杆202的外侧设置有中轴外壳203,中轴外壳203与锁紧螺栓杆202之间为滑
动关系,锁紧螺栓杆202的右端与锁紧螺母204螺纹相连,中轴外壳203的外侧安装有轴承207,轴承207的外侧安装有轴承垫圈208,轴承207可插入至轴承垫圈208的内部,轴承207和轴承垫圈208在中轴外壳203上同时分布有两个,轴承207的外侧安装有防尘垫圈206,防尘垫圈206的外侧设置有中轴挡片205。
22.焊枪支撑架1的右端下侧固定安装有静焊臂6,静焊臂6的固定方向与动焊臂3的初始方向相同,静焊臂6上安装有焊枪静电极7,焊枪静电极7的上端安装有电极帽5,焊枪静电极7位于焊枪动电极4的正下侧,焊枪静电极7的内部开设有冷却水槽,冷却水槽的外端连接有输水管8,输水管8通过防水接头连接至焊枪支撑架1上,接头连接在焊枪支撑架1的内部与水划板13相连通,水划板13通过输水管8与动焊臂3内部的冷却水槽相连通,通过水冷对动焊臂3和静焊臂6进行冷却。
23.焊枪支撑架1的顶部安装有折返式电缸11,折返式电缸11通过推动杆与动焊臂3相连,通过推动杆的作用使动焊臂3在转动中轴2上转动,通过折返式电缸11来驱动动焊臂3。
24.焊枪支撑架1的内部固定有中频变压器12,中频变压器12的顶部与折返式电缸11电性相连,中频变压器12的左端与静焊臂导电块9和动焊臂导电块10分别电性相连,静焊臂导电块9和动焊臂导电块10均位于焊枪支撑架1的内部内,静焊臂导电块9的另一端与静焊臂6相连,动焊臂导电块10的另一端通过软连接与动焊臂3相连,通过中频变压器12对该装置的供电进行调控。
25.焊枪支撑架1的中部外侧安装有挂架板14,挂架板14与焊枪支撑架1之间通过螺栓进行固定,挂架板14的右侧面上安装有安装法兰,便于对该装置进行安装。
26.工作原理:在使用该模块化轻x型中频伺服机器人点焊枪时,首先通过挂架板14上的安装法兰将该装置安装在机器人上,将水划板13与供水装置相连通,通过中频变压器12给折返式电缸11供电,折返式电缸11通过推动杆向右侧拉动动焊臂3,使动焊臂3在转动中轴2上进行转动,使动焊臂3带动焊枪动电极4围绕转动中轴2转动一定的角度,在通过机器人的手臂将焊件装配成搭接接头后,移动至焊枪静电极7的上侧,再通过折返式电缸11的推动,使焊枪动电极4转动施加压力并压紧焊件,使中频变压器12通过静焊臂导电块9和动焊臂导电块10分别给静焊臂6和焊枪动电极4供电,使直流电通过静焊臂6和焊枪动电极4与焊件的接触面及邻近区域产生的电阻热熔化焊接焊件,到达电焊的目的。
27.在焊接的过程中,水划板13通过输水管8给动焊臂3和静焊臂6内部的冷却水槽供水,使水流回流带走动焊臂3和静焊臂6上的热量,同时水划板13的输水管8经过中频变压器12的外侧,能够对中频变压器12进行降温,且本说明书中未作详细描述的内容均属于本领域专业技术人员公知的现有技术。
28.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。