1.本实用新型涉及机械手技术领域,尤其涉及一种线控柔性机械手。
背景技术:
2.机械手一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作。
3.随着现代社会的发展,3d 打印技术和新型智能材料发展成熟,柔性机械手作为热门领域迅猛发展。其概念区别于传统的机械手,设计灵感往往来自于自然界的生物,如蚯蚓、海星和章鱼等。柔性机械手运用橡胶、形状记忆合金(shape memory alloys,sma)和智能材料等柔性材料的天然柔顺性,降低控制的复杂程度,实现其良好的灵活性以及与人、环境的安全交互性,有着十分广阔的研究和应用前景,然现有的部分线控柔性机械手在现实使用时还是存在机械手难以避免产生定位误差和振动的问题,因此,需要提出新型的一种线控柔性机械手。
技术实现要素:
4.本实用新型的目的是为了解决现有的技术中存在线控柔性机械手在使用过程中难以避免定位误差和振动的问题,而提出的一种线控柔性机械手。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种线控柔性机械手,包括底盘,所述底盘的内部设置有舵机本体,所述舵机本体的输出端固定有主动齿轮,所述底盘的内壁底部等距分布固定有三个圆柱杆,每个所述圆柱杆的外表面均通过第一轴承转动连接有从动齿轮,每个所述从动齿轮的底部均固定有绕线轴,所述底盘的外壁靠近底部位置的三个凹槽的内部均转动连接有连接件,每个所述连接件的底部凹槽处均转动连接有指根支架,每个所述指根支架的内部均固定有指根本体,每个所述指根本体的底部均等距分布设置有九个指节,其中三个所述指节的底部均设置有指尖,每个所述指尖的内部均固定有线端固定棒,每个所述线端固定棒的中间凹槽内部均固定有弹力绳,每个所述线端固定棒的其余两个凹槽内部均固定有控制线。
6.优选的,三个所述从动齿轮的齿牙均与主动齿轮的齿牙相啮合,每个所述绕线轴均通过第二轴承分别转动连接在每个圆柱杆的外表面。
7.优选的,二十七个所述指根本体共分为三组,每个所述弹力绳的一端均从下到上分别活动贯穿每个指尖的内部、每组指根本体的底部和每个指根支架的底部,每个所述弹力绳的一端均与底盘的底部相固定。
8.优选的,六个所述控制线共分为三组,每组所述控制线的一端均从下到上分别活动贯穿每个指尖的内部、每组指根本体的底部和每个指根支架的底部,三组所述控制线的一端均活动贯穿底盘的底部,且每组控制线分别与每个绕线轴上的两个凹槽内壁相固定。
9.优选的,所述底盘的内壁底部等距分布固定有三组线导管,每个所述控制线的一端分别活动套接在每个线导管的内部。
10.优选的,所述底盘的顶部安装有顶盖,所述顶盖的底部安装有舵机架,所述舵机架与舵机本体支架通过螺栓和螺母相配合固定,所述顶盖的顶部开设有安装孔。
11.与现有技术相比,本实用新型的优点和积极效果在于,
12.本实用新型中,通过在底盘、舵机本体、主动齿轮、圆柱杆、从动齿轮、线导管、绕线轴、连接件、指根支架、指根本体、指节、指尖、线端固定棒、弹力绳和控制线的配合下,可以有效地解决机械手使用过程中产生定位误差和振动的情况,即有效地提高线控柔性机械手的使用效率,在舵机本体、主动齿轮、三个从动齿轮和三个圆柱块的配合下,可以带动三个绕线轴进行同步转动,在弹力绳和线端固定棒的配合下,可以将所对应的一组指节、指根本体和指尖固定在一起,在顶盖和舵机架的配合下,可以让舵机本体稳定的带动主动齿轮进行转动。
附图说明
13.图1为本实用新型提出一种线控柔性机械手的部分立体图;
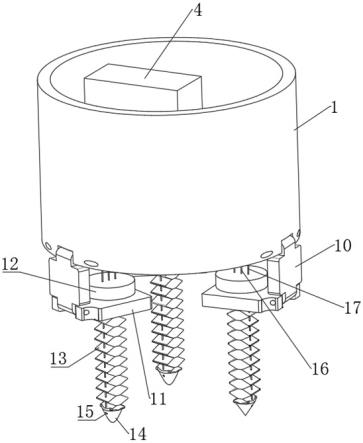
14.图2为本实用新型提出一种线控柔性机械手的另一角度部分立体图;
15.图3为本实用新型提出一种线控柔性机械手的俯视角度部分立体图;
16.图4为本实用新型提出一种线控柔性机械手的仰视角度部分立体图;
17.图5为本实用新型提出一种线控柔性机械手的舵机架立体图;
18.图6为本实用新型提出一种线控柔性机械手的底盘立体图;
19.图7为本实用新型提出一种线控柔性机械手的绕线轴立体图;
20.图8为本实用新型提出一种线控柔性机械手的线端固定棒立体图;
21.图9为本实用新型提出一种线控柔性机械手的指根支架、指根本体和指节的立体结构示意图。
22.图例说明:1、底盘;2、顶盖;3、舵机架;4、舵机本体;5、主动齿轮;6、圆柱杆;7、从动齿轮;8、线导管;9、绕线轴;10、连接件;11、指根支架;12、指根本体;13、指节;14、指尖;15、线端固定棒;16、弹力绳;17、控制线;18、安装孔。
具体实施方式
23.为了能够更清楚地理解本实用新型的上述目的、特征和优点,下面结合附图和实施例对本实用新型做进一步说明。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
24.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,本实用新型还可以采用不同于在此描述的其他方式来实施,因此,本实用新型并不限于下面公开说明书的具体实施例的限制。
25.如图1-9所示,本实用新型提供了一种线控柔性机械手,包括底盘1,底盘1的内部设置有舵机本体4,舵机本体4的输出端固定有主动齿轮5,底盘1的内壁底部等距分布固定有三个圆柱杆6,每个圆柱杆6的外表面均通过第一轴承转动连接有从动齿轮7,每个从动齿轮7的底部均固定有绕线轴9,底盘1的外壁靠近底部位置的三个凹槽的内部均转动连接有连接件10,每个连接件10的底部凹槽处均转动连接有指根支架11,每个指根支架11的内部均固定有指根本体12,每个指根本体12的底部均等距分布设置有九个指节13,其中三个指
节13的底部均设置有指尖14,每个指尖14的内部均固定有线端固定棒15,每个线端固定棒15的中间凹槽内部均固定有弹力绳16,每个线端固定棒15的其余两个凹槽内部均固定有控制线17,三个从动齿轮7的齿牙均与主动齿轮5的齿牙相啮合,每个绕线轴9均通过第二轴承分别转动连接在每个圆柱杆6的外表面,二十七个指根本体12共分为三组,每个弹力绳16的一端均从下到上分别活动贯穿每个指尖14的内部、每组指根本体12的底部和每个指根支架11的底部,每个弹力绳16的一端均与底盘1的底部相固定,六个控制线17共分为三组,每组控制线17的一端均从下到上分别活动贯穿每个指尖14的内部、每组指根本体12的底部和每个指根支架11的底部,三组控制线17的一端均活动贯穿底盘1的底部,且每组控制线17分别与每个绕线轴9上的两个凹槽内壁相固定,底盘1的内壁底部等距分布固定有三组线导管8,每个控制线17的一端分别活动套接在每个线导管8的内部,底盘1的顶部安装有顶盖2,顶盖2的底部安装有舵机架3,舵机架3与舵机本体4支架通过螺栓和螺母相配合固定,顶盖2的顶部开设有安装孔18,每组控制线17在所对应的绕线轴9的两个凹槽处内壁分别以顺时针与逆时针的方向缠绕。
26.其所达到的效果为,当需要对使用线控柔性机械手对物体进行夹持移动时,此时先将线控柔性机械手通过安装孔18的配合将其固定在机械臂上,当机械臂带动整个线控柔性机械手移动到需要夹持的物体时,此时直接启动舵机本体4,此时启动的舵机本体4会带动主动齿轮5进行转动,而转动的主动齿轮5会在三个圆柱杆6和三个第一轴承的配合下,同步带动三个从动齿轮7进行转动,而这时转动的三个从动齿轮7会分别带动三个绕线轴9进行转动,这时抓活动的每个绕线轴9都会带动所对应的一组其中一个控制线17进行收卷操作,而每组另一个控制线17的一端就会开始进行放卷操作,当每组其中一个控制线17的一端都被所对应的绕线轴9带动收卷时,此时在每个控制线17所对应的指尖14、线端固定棒15、弹力绳16、指根支架11、连接件10和指根本体12的配合下,每组指节13开始发生转动弯曲,这时弯曲的每组指节13也会带动所对应的指尖14发生转动,当三个指尖14的尖端将物体紧紧地夹住时,此时暂停舵机本体4,这时再利用机械臂带动夹持有物体的线控柔性机械手进行移动即可,当需要将夹持的物体放下来时,此时直接让舵机本体4的输出端进行反转,这时每组其中一个控制线17开始进行放卷操作,而每组另一个控制线17会进行收卷操作,当每组另一个控制线17的一端开始进行收卷操作时,每组另一个控制线17所对应的一组指节13和指尖14均开始复位初始位置,当三组指节13和三个指尖14均复位到初始位置时,此时物体即可解除被夹持的操作,此线控柔性机械手操作稳定,定位效果好,有效地避免被夹持物体在被移动时从三个指尖14之间滑落的情况,有效地保证物体的安全。
27.其中,舵机本体4为现有技术,在这里不做过多的解释。
28.工作原理:当需要对使用线控柔性机械手对物体进行夹持移动时,此时先将线控柔性机械手通过安装孔18的配合将其固定在机械臂上,当机械臂带动整个线控柔性机械手移动到需要夹持的物体时,此时直接启动舵机本体4,此时启动的舵机本体4会带动主动齿轮5进行转动,而转动的主动齿轮5会在三个圆柱杆6和三个第一轴承的配合下,同步带动三个从动齿轮7进行转动,而这时转动的三个从动齿轮7会分别带动三个绕线轴9进行转动,这时抓活动的每个绕线轴9都会带动所对应的一组其中一个控制线17进行收卷操作,而每组另一个控制线17的一端就会开始进行放卷操作,当每组其中一个控制线17的一端都被所对应的绕线轴9带动收卷时,此时在每个控制线17所对应的指尖14、线端固定棒15、弹力绳16、
指根支架11、连接件10和指根本体12的配合下,每组指节13开始发生转动弯曲,这时弯曲的每组指节13也会带动所对应的指尖14发生转动,当三个指尖14的尖端将物体紧紧地夹住时,此时暂停舵机本体4,这时再利用机械臂带动夹持有物体的线控柔性机械手进行移动即可,当需要将夹持的物体放下来时,此时直接让舵机本体4的输出端进行反转,这时每组其中一个控制线17开始进行放卷操作,而每组另一个控制线17会进行收卷操作,当每组另一个控制线17的一端开始进行收卷操作时,每组另一个控制线17所对应的一组指节13和指尖14均开始复位初始位置,当三组指节13和三个指尖14均复位到初始位置时,此时物体即可解除被夹持的操作。
29.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
