1.本实用新型涉及纤维机器人缠绕头,具体涉及一种用于纤维干法缠绕的机器人缠绕头。本实用新型属于复合材料自动化成型技术领域。
背景技术:
2.在现代航空航天的发展中,复合材料在降低了飞行器的重量和维护要求的同时,提高了系统的性能和可靠性,因此,复合材料技术被认为是现代航天航空发展中的关键技术之一。先进树脂基复合材料不仅具有质量轻、强度高、抗疲劳、耐腐蚀等优点,而且集设计制造一体化可用于成型复杂构件,目前已成为继铝、钢、钛之后的第四大航空航天结构材料。
3.在树脂基复合材料的各种自动化成型技术中,纤维缠绕能够按产品的受力状况设计缠绕规律,能够充分发挥纤维的强度,在实际应用中占据重要部分。传统的纤维缠绕机通常由纤维纱箱、运动小车胶槽及张力机构、缠绕丝嘴以及运动主轴组成,其中纤维纱箱用于实现连续纤维的初始供给并保证初始张力的稳定,运动小车则包含用于实现纤维与树脂混合的浸胶槽以及用于改善纤维张力的张力控制机构两个部分,缠绕丝嘴则用于实现纤维丝束的展开与送出,主轴与丝嘴通过一定的运动规律将浸渍后的纤维束缠绕在芯模表面,初步完成纤维缠绕制品的加工,之后,通过固化以及脱模实现缠绕制品的制作,由于机器人具有高自由度,在占据较小空间的同时具有较好的灵活性,因此被应用于干法缠绕,其整体由机器人机构以及纤维缠绕头组成,机器人携带纤维缠绕头完成缠绕工作。
4.现有的干法缠绕机器人缠绕头存在缠绕过程中纤维越出缠绕机构,出现滑纱的现象,且张力无法监测的问题。
技术实现要素:
5.本实用新型的目的是为了解决现有的干法缠绕机器人缠绕头存在缠绕过程中纤维越出缠绕机构,出现滑纱的现象,且张力无法监测的问题。进而提供一种用于纤维干法缠绕的机器人缠绕头。
6.所述技术问题是通过以下方案解决的:
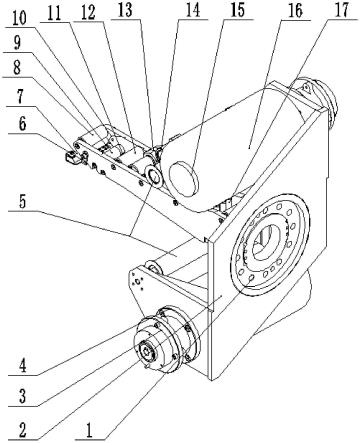
7.一种用于纤维干法缠绕的机器人缠绕头,它包括适配法兰、焊接支架、连接法兰、出纱辊、聚纱辊、平行支架、后梳子、张力传感器、前梳子、两个磁粉制动器、两个导纱辊、挑纱机构、两个走纱辊和两个纱团组件;适配法兰焊接安装在焊接支架上,平行支架通过螺栓固定安装在配法兰上,每个纱团组件与一个磁粉制动器固定连接,纱团组件通过连接法兰转动连接安装在焊接支架上,且两个纱团组件对称设置在平行支架的上方和下方,每个导纱辊靠近一个纱团组件固定安装在焊接支架上,挑纱机构靠近上方的导纱辊固定安装在焊接支架上,前梳子固定安装在挑纱机构下方的平行支架上,两个走纱辊、后梳子、聚纱辊和出纱辊依次远离前梳子安装在平行支架上,张力传感器位于两个走纱辊之间设置并安装在平行支架上。
8.本实用新型与现有技术相比包含的有益效果是:
9.1机器人的专用纤维干法缠绕头,重量轻,便于同负荷的机器人进行大张力缠绕。
10.2机器人缠绕过程通过张力传感器13进行监测,通过张力传感器13对机器人缠绕过程中的稳定性做出直观上的评价,便于发现及改善问题。
11.3红外灯管7加热温度可控,纤维束的加热效果直接影响机器人缠绕制品的质量,通过将加热温度进行控制,有利于提高缠绕质量。
12.4纤维缠绕制品易实现机械化和自动化生产,工艺条件确定后,缠出来的产品质量稳定,精确,同时,纤维缠绕生产效率高,在航空航天领域具有广泛的应用。
13.5、使用本技术进行走纱,通过合理的机械结构以及合适的走纱路线解决纤维缠绕过程中可能出现的纤维越出问题,有效避免纤维缠绕过程中出现的滑纱及纤维偏移出机构的现象发生,通过添加张力传感器13对缠绕过程中的张力进行实时监测,达到了走纱缠绕过程张力实时监测的效果。
附图说明
14.图1是本技术机器人缠绕头的轴测图。
15.图2是本技术机器人缠绕头的主视图。
16.图3是本技术机器人缠绕头的俯视图。
17.图4是图3的a-a向剖视图,图中虚线为纤维纱走纱示意图。
18.图5导纱辊5的剖视图。
19.图6是机械胀轴15的剖视图。
20.图7本技术机器人缠绕头安装在机械臂末端连接示意图。
具体实施方式
21.具体实施方式一:结合图1-图7说明本实施方式,所述一种用于纤维干法缠绕的机器人缠绕头,它包括适配法兰1、焊接支架2、连接法兰4、出纱辊8、聚纱辊9、平行支架10、后梳子11、张力传感器13、前梳子17、两个磁粉制动器3、两个导纱辊5、挑纱机构14、两个走纱辊12和两个纱团组件;适配法兰1焊接安装在焊接支架2上,平行支架10通过螺栓固定安装在配法兰1上,每个纱团组件与一个磁粉制动器3固定连接,纱团组件通过连接法兰4转动连接安装在焊接支架2上,且两个纱团组件对称设置在平行支架10的上方和下方,每个导纱辊5靠近一个纱团组件固定安装在焊接支架2上,挑纱机构14靠近上方的导纱辊5固定安装在焊接支架2上,前梳子17固定安装在挑纱机构14下方的平行支架10上,两个走纱辊12、后梳子11、聚纱辊9和出纱辊8依次远离前梳子17安装在平行支架10上,张力传感器13位于两个走纱辊12之间设置并安装在平行支架10上。
22.后梳子11与前梳子17用于纤维束的各自走纱,防止在走纱过程中两束纤维发生交织影响工作。张力传感器13置于两个走纱辊12之间,组成张力测量机构,用以测量纤维束的张力大小,便于后续的调整。
23.前梳子17与后梳子11均是用于将纤维束分开,防止两者交缠,前梳子17的梳子表面壳体可发生转动,减少纤维磨损,而后梳子11接近出纱点,故直接以固定的细长轴组成固定于10平行支架上。
24.出纱辊8包括出纱辊轴、出纱辊外套、两个出纱辊弹性挡圈、两个出纱辊盖板、两个出纱辊挡圈和两个出纱辊轴承,出纱辊外套通过两个出纱辊轴承套装在出纱辊轴上,且出纱辊轴每端分别套设有出纱辊弹性挡圈、出纱辊挡圈和出纱辊盖板,出纱辊轴的两端通过螺钉安装在平行支架10上。
25.走纱辊12包括走纱辊轴、走纱辊外套、两个走纱辊弹性挡圈、两个走纱辊盖板、两个走纱辊挡圈和两个走纱辊轴承,走纱辊外套通过两个出纱辊轴承套装在走纱辊轴上,且走纱辊轴每端分别套设有走纱辊弹性挡圈、走纱辊挡圈和走纱辊盖板,走纱辊轴的两端通过螺钉安装在平行支架10上。
26.具体实施方式二:结合图1-图7说明本实施方式,本实施方式所述它还包括加热灯支架6和红外灯管7;红外灯管7固定安装在加热灯支架6上,加热灯支架6靠近出纱辊8固定安装在平行支架10上。
27.加热灯支架6通过螺钉固定在平行支架10上,其中加热灯支架6做成了腰型孔,用以调节红外灯管的方向及到纤维束的距离,保证产品的加热效果,同时,为该机构制作了温控部分,用以稳定加热温度范围。红外灯管7选用700w半镀金红外线加热管,同时配备温控器,使缠绕过程中的加热温度可控,其它组成和连接方式与具体实施方式一相同。
28.具体实施方式三:结合图1-图7说明本实施方式,本实施方式所述一种用于纤维干法缠绕的机器人缠绕头,纱团组件包括机械胀轴15和纱团16;机械胀轴15通过轴承与焊接支架2固定连接,机械胀轴15的一端与磁粉制动器3固定连接,纱团16套装在机械胀轴15上。
29.纱团16胀紧连接套装在机械胀轴15上。其它组成和连接方式与具体实施方式一相同。
30.具体实施方式四:结合图1-图7说明本实施方式,本实施方式所述一种用于纤维干法缠绕的机器人缠绕头,焊接支架2上两个机械胀轴15平行设置,且两个磁粉制动器3分别设置在平行支架10两侧。其它组成和连接方式与具体实施方式三相同。
31.具体实施方式五:结合图1-图7说明本实施方式,本实施方式所述一种用于纤维干法缠绕的机器人缠绕头,导纱辊5包括辊轴、外套体、两个弹性挡圈和两个盖板;外套体通过两个轴承套装在辊轴上,外套体的两端分别设有一个弹性挡圈和盖板,弹性挡圈和盖板套装在辊轴上,辊轴的一端螺纹连接安装在焊接支架2上。其它组成和连接方式与具体实施方式一相同。
32.具体实施方式六:结合图1-图7说明本实施方式,本实施方式所述一种用于纤维干法缠绕的机器人缠绕头,聚纱辊9外圆面的中部加工有凹槽。
33.用于将两束纤维聚拢在一起,便于进行缠绕工作。其它组成和连接方式与具体实施方式一相同。
34.具体实施方式七:结合图1-图7说明本实施方式,本实施方式所述一种用于纤维干法缠绕的机器人缠绕头,它还包括汇合纱辊18、上走纱辊19和下走纱辊20;汇合纱辊18、上走纱辊19和下走纱辊20转动连接安装在平行支架10上,汇合纱辊18靠近走纱辊12位于前梳子17的一侧设置,上走纱辊19和下走纱辊20位于前梳子17的另一侧设置,且上走纱辊19设置在下走纱辊20的正上方。其它组成和连接方式与具体实施方式一相同。
35.工作原理
36.缠绕头与机械臂之间通过螺钉与销钉完成连接固定,在进行缠绕工作时,该缠绕
头随着机械臂在空间上移动,缠绕头并没有添加额外的丝嘴旋转轴,丝嘴的旋转通过机械臂的末端轴旋转实现,充分利用机械臂灵活性优势的同时,减少了缠绕头机械结构的设计工作,减轻了缠绕头的重量。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。