1.本实用新型涉及机械焊接技术领域,具体为一种机器人的机械焊接平台。
背景技术:
2.传统的焊接仪器主要通过人工对工件进行焊接,焊接机器人配套使用的焊接工装台位于焊接机器人的焊接工位中,焊接时,先上料,即将需要焊接的工件放置在工装台面板上,然后由焊接机器人上的焊枪对需要焊接的工件进行焊接操作,焊接完成后再下料,即将焊接完成的工件从工装台面板上移走,然后再上料,接着再进行下一个工件的焊接。
3.cn202121323689.3新型焊接机器人用焊接平台,本实用新型涉及焊接平台领域,公开了新型焊接机器人用焊接平台,本实用新型中,包括焊接平台,所述焊接平台的内壁固定安装有电机,所述电机的左端固定安装有螺纹杆.....所述螺纹杆座的右端活动安装有挡块,所述挡块的内壁滑动连接有弹簧块,所述弹簧块的右端固定安装有连接杆,该实用通过焊接平台和螺纹杆座内部的结构,便于对物件进行很好的固定,同时减少人员的使用,提高装置的智能化调节。
4.机械焊接平台主要针对工件的形状及尺寸对其焊接位置进行调节,同时焊接过程中不可避免的会产生大量烟气,烟气中的颗粒物及有害物质将严重影响车间工人的健康,而焊接平台需要进一步添加另一组烟气抽取结构对加工过程中烟气进行抽取及过滤,但机器人在运行过程中,自有运行的轨迹而烟气抽取机构不能与机器人运行轨迹同步,会影响机器人运行过程中安全性,同时需要人工对打磨面进行打磨操作,金属粉末也会掉落焊接平台表面。
技术实现要素:
5.本实用新型的目的在于提供一种机器人的机械焊接平台,以解决上述背景技术中提出机器人在运行过程中,自有运行的轨迹而烟气抽取机构不能与机器人运行轨迹同步,会影响机器人运行过程中安全性,同时需要人工对打磨面进行打磨操作,金属粉末也会掉落焊接平台表面的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种机器人的机械焊接平台,包括工件平台,其左右两侧焊接固定有矩形导轨,且矩形导轨的外侧滑块连接有牵引滑座,所述牵引滑座的正上方螺栓固定有液压机械臂,且液压机械臂的外侧螺栓固定有步进电机,还包括:焊接机构,其外侧连接有步进电机输出端;托举机构,其设置在工件平台的正上方,且工件平台的左右两侧上表面均开设有矩形滑槽,所述工件平台的中部上表面开设有置物凹槽。
7.优选的,所述液压机械臂与焊接机构通过步进电机连接,且焊接机构和步进电机为轴连接,并且焊接机构与托举机构为相互平行。
8.优选的,所述焊接机构的外侧包括有电焊机头和双向电机,电焊机头,其电线连接在焊接机构右侧,且电焊机头的正上方贯穿连接有抽取管道,所述抽取管道的尾端贯穿连
接有净化腔体;双向电机,其安装在焊接机构内部,且双向电机的左侧轴连接有打磨转块,所述双向电机的左侧轴连接有鼓风扇叶,且鼓风扇叶内嵌安装在净化腔体内部。
9.优选的,所述电焊机头与托举机构为相互垂直,且电焊机头与焊接机构通过双向电机和液压机械臂构成转动结构,并且液压机械臂的升降尺寸范围为30-70cm。
10.优选的,所述托举机构的外侧包括有辅助滑块和横向托块条;辅助滑块,其轴连接在托举机构的左右两侧,且托举机构的正上方胶合连接有橡胶圈垫;横向托块条,其正上方胶合连接有电磁铁块,且横向托块条的内部螺纹连接有螺纹杆,所述托举机构的左右两侧贯穿开设有矩形导槽。
11.优选的,所述横向托块条与托举机构通过矩形导槽连接,且横向托块条通过矩形导槽和螺纹杆构成滑动结构,并且横向托块条的数量为2组。
12.优选的,所述矩形滑槽关于工件平台中心线对称分布,且工件平台与液压机械臂通过矩形导轨和牵引滑座连接,通过牵引滑座对矩形导轨进行导向,对牵引滑座的位置进行调节。
13.与现有技术相比,本实用新型的有益效果是:
14.该机器人的机械焊接平台,设置有托举机构与横向托块条,横向托块条在矩形导槽在外侧进行滑动,对两组横向托块条之间的距离进行调节,横向托块条对工件的底部进行托举,根据工件的宽度对两组横向托块条托举尺寸进行调节,方便对不同宽度及长度工件进行托举及定位,避免工件在焊接过程中发生晃动情况,通过设置两组托举机构对工件的底部进行定位,在使用过程中,托举机构通过两侧的辅助滑块在工件平台的外侧进行滑动,对托举机构的两侧进行定位及锁定处理;
15.该机器人的机械焊接平台,设置有焊接机构及矩形导轨,矩形导轨对牵引滑座的外侧进行滑动,对牵引滑座及液压机械臂的底部进行定位,根据使用需求利用牵引滑座带动焊接机构进行垂直升降,根据工件的高度对焊接机构的位置进行调节,对不同高度工件进行垂直焊接调节,通过焊接机构带动双向电机带动鼓风扇叶和打磨转块进行转动,一方面打磨转块带动工件的表面焊接面进行打磨及找平处理,一方面加速净化腔体内部的空气的流速速度,通过抽取管道对打磨产生的碎屑进行抽取,避免碎屑附着在焊接件表面。
附图说明
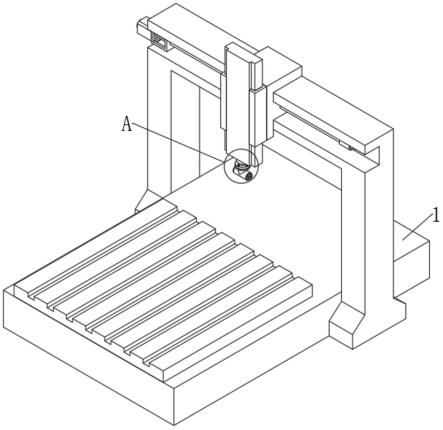
16.图1为本实用新型正视结构示意图;
17.图2为本实用新型托举机构立体结构示意图;
18.图3为本实用新型托举机构俯剖结构示意图;
19.图4为本实用新型工件平台局部俯视结构示意图;
20.图5为本实用新型焊接机构内部结构示意图;
21.图6为本实用新型焊接机构转动结构示意图。
22.图中:1、工件平台;2、矩形导轨;3、牵引滑座;4、液压机械臂;5、焊接机构;51、电焊机头;52、抽取管道;53、打磨转块;54、双向电机;55、净化腔体;56、鼓风扇叶;6、托举机构;61、辅助滑块;62、橡胶圈垫;63、横向托块条;64、电磁铁块;65、矩形导槽;66、螺纹杆;7、步进电机;8、矩形滑槽;9、置物凹槽。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.请参阅图1-6,本实用新型提供一种技术方案:一种机器人的机械焊接平台,包括工件平台1,其左右两侧焊接固定有矩形导轨2,且矩形导轨2的外侧滑块连接有牵引滑座3,牵引滑座3的正上方螺栓固定有液压机械臂4,且液压机械臂4的外侧螺栓固定有步进电机7,液压机械臂4与焊接机构5通过步进电机7连接,且焊接机构5和步进电机7为轴连接,并且焊接机构5与托举机构6为相互平行,还包括:
25.焊接机构5,其外侧连接有步进电机7输出端;
26.托举机构6,其设置在工件平台1的正上方,且工件平台1的左右两侧上表面均开设有矩形滑槽8,矩形滑槽8关于工件平台1中心线对称分布,且工件平台1与液压机械臂4通过矩形导轨2和牵引滑座3连接,工件平台1的中部上表面开设有置物凹槽9。
27.根据图1、图5及图6所示,操作人员通过控制液压机械臂4带动焊接机构5进行垂直下降,滨根据焊接件的部位,打开步进电机7,利用步进电机7带动焊接机构5进行转动,使得焊接机构5一侧的电焊机头51与焊接件的焊接端进行接触,同时打开双向电机54,利用双向电机54带动鼓风扇叶56进行转动,加速净化腔体55内部的空气的流速速度,通过抽取管道52对焊接产生的烟气进行抽取,当完成对焊接件的焊接段加工后,再通过打磨转块53对工件表面进行打磨处理;
28.焊接机构5的外侧包括有电焊机头51和双向电机54,电焊机头51,其电线连接在焊接机构5右侧,且电焊机头51的正上方贯穿连接有抽取管道52,抽取管道52的尾端贯穿连接有净化腔体55;双向电机54,其安装在焊接机构5内部,且双向电机54的左侧轴连接有打磨转块53,双向电机54的左侧轴连接有鼓风扇叶56,且鼓风扇叶56内嵌安装在净化腔体55内部;电焊机头51与托举机构6为相互垂直,且电焊机头51与焊接机构5通过双向电机54和液压机械臂4构成转动结构,并且液压机械臂4的升降尺寸范围为30-70cm。
29.根据图1、图2、图3及图4所示,首先将该装置放置在需要进行工作的位置,操作人员首先根据工件的宽度,握持螺纹杆66,螺纹杆66带动横向托块条63在矩形导槽65的外侧进行滑动,对左右两侧的横向托块条63在托举机构6的内部进行滑动,对两组横向托块条63之间距离进行调节,方便横向托块条63对工件四周进行托举,操作人员打开电磁铁块64对工件的底部进行吸附及定位,同时利用橡胶圈垫62增加工件在移动过程中的摩擦力,避免工件在焊接过程中,焊接机构5与工件相互触碰导致工件发生晃动情况,同时操作人员握持托举机构6,托举机构6通过左右两侧的辅助滑块61在矩形滑槽8的内部进行滑动,对两组托举机构6的距离进行调节;
30.托举机构6的外侧包括有辅助滑块61和横向托块条63;辅助滑块61,其轴连接在托举机构6的左右两侧,且托举机构6的正上方胶合连接有橡胶圈垫62;横向托块条63,其正上方胶合连接有电磁铁块64,且横向托块条63的内部螺纹连接有螺纹杆66,托举机构6的左右两侧贯穿开设有矩形导槽65,横向托块条63与托举机构6通过矩形导槽65连接,且横向托块条63通过矩形导槽65和螺纹杆66构成滑动结构,并且横向托块条63的数量为2组。
31.工作原理:在使用该机器人的机械焊接平台时,根据图1、图2、图5及图6所示,操作人员通过拉动托举机构6,通过两组托举机构6对工件左右两侧进行夹持,通过横向托块条63及电磁铁块64对工件的底部进行吸附;利用控制液压机械臂4带动焊接机构5进行垂直上升,利用步进电机7带动焊接机构5进行反方向转动,使得打磨转块53与焊接段相互接触,利用双向电机54带动打磨转块53进行转动,对焊接件的焊接面进行打磨处理,利用双向电机54带动鼓风扇叶56进行转动,加速净化腔体55内部的空气的流速速度,通过抽取管道52对打磨产生的碎屑进行抽取,避免碎屑附着在焊接件表面。
32.本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
33.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。