1.本发明属于旋转设备不平衡故障诊断领域,涉及一种基于模型的、采用时域响应信号提取转子不平衡参数的方法。
背景技术:
2.在工业应用中,存在着较多类型的转子可简化为单盘类转子,在这些类型的转子中不平衡故障是引起设备振动变大的最主要原因。当旋转设备长期运行于高振动条件下时,会导致设备的使用寿命降低,产生重大安全事故,从而造成经济和生命财产的损失。而转子动平衡是降低不平衡故障导致设备振动变大的最主要手段,因此,高效、准确的平衡转子具有重要的意义。
3.传统的平衡方法如影响系数法、振型平衡法由于需要多次启停机进行加减试重,存在平衡效率较低的问题。传统的基于模型的平衡方法虽然平衡效率较高,但对传感器的安装位置和数量有着一定的要求,当传感器数量较少时,方法的不平衡参数识别结果对传感器的位置较为敏感,也就是说,当采用不同的测量位置时,方法的不平衡参数识别结果存在着较大的差异,而且识别均存在着较大的误差。
4.综上,亟需一种新的基于模型的不平衡参数识别方法,其可在测量点数较少的情况下,完成不平衡参数的高效、准确识别。
技术实现要素:
5.为克服现有技术的不足之处,本发明提出了一种基于模型的、采用时域响应信号提取转子不平衡参数的方法,此方法可基于一个测量位置(x和y方向)的振动数据准确识别单盘转子的不平衡参数。
6.为达到以上目的,本发明采用如下技术方案:
7.1)建立单盘转子-支承系统有限元模型;
8.2)在考虑陀螺效应的情况下,采用iirs降阶技术对步骤1)中的有限元模型进行降阶;
9.3)采用步骤2)中获得的降阶模型建立不平衡力识别系统模型;
10.4)采用正则化方法求解步骤3)中建立的不平衡力识别系统模型,以获得不平衡力;
11.5)采用频谱校正法对步骤4)中获得的不平衡力进行处理,以获得不平衡参数(幅度和相位);
12.本发明的改进之处在于,步骤1)包括:
13.采用有限元方法,建立转子-支承系统的运动方程
[0014][0015]
式中,m为质量矩阵,c为阻尼矩阵,g为陀螺矩阵,k为刚度矩阵,f为不平衡力向量,q为位移响应向量;
[0016]
本发明的改进之处在于,步骤2)包括:
[0017]
首次考虑了陀螺效应的影响,采用iirs降阶技术对步骤1)中的模型矩阵m、c、g、k进行降阶,得到降阶后的质量、阻尼、陀螺和刚度矩阵:mr、cr、gr、kr,具体步骤参照如下:
[0018]
步骤2.1)在动态矩阵降阶技术中,全模型的总自由度2n通常分为主自由度2m(在简化模型中保留,在本文中总是包括测量和存在不平衡力的自由度)和从自由度2s(省略)。按照选定的主、从自由度的顺序调整模型矩阵,得到各分块矩阵
[0019]mmm
,m
ms
,m
sm
,m
ss
,c
mm
,c
ms
,c
sm
,c
ss
,g
mm
,g
ms
,g
sm
,g
ss
,k
mm
,k
ms
,k
sm
,k
ss
[0020]
步骤2.2)构建状态空间模型分块矩阵a,b,bc,bg:
[0021][0022]
步骤2.3)按如下过程进行迭代计算
[0023]
①
假设转化矩阵的初始值:
[0024][0025]
②
计算聚缩后的矩阵:
[0026]
t
[k]
=[i(t
[k]
)
t
]
t
[0027][0028][0029][0030][0031]
③
计算迭代后的转换矩阵:
[0032][0033]
④
计算结构模型缩聚后的复特征方程对应的复特征值λj,并按照特征值虚部ωj(即有阻尼自振频率数值)从小到大排列:
[0034][0035]
⑤
分别计算复特征值实部和虚部的相对误差:
[0036][0037]
式中ξ为事先给定的容许最大误差。
[0038]
⑥
重复
②
~
⑤
步,直至满足要求,退出循环。
[0039]
步骤2.4)整理迭代p次后的矩阵,得到缩聚后的模型矩阵为:
[0040]
[0041]
到此我们可得降阶后的mr,cr,gr和kr;
[0042]
本发明的改进之处在于,步骤3)包括:
[0043]
由步骤2)中获得的降阶矩阵,进一步得到连续时间状态空间方程和观测方程:
[0044][0045]
式中为状态向量,为系统矩阵,为输入影响矩阵,其中s为不平衡力的选择矩阵,y(t)为输出向量。当选用电涡流传感器作为采集转子-支承系统位移的传感器时,c=[sd]为状态输出矩阵,其中sd为系统位移选择矩阵,此时,直接传输矩阵d为零矩阵。
[0046]
由于测量通常在离散状态下进行,即在时刻kδt时进行测量,故需对上述方程进行离散化,得到下述方程:
[0047]
x
k 1
=axk bfk[0048]
yk=cxk dfk[0049]
式中xk=x(kδt)为离散状态向量,a=exp(acδt)为离散的状态矩阵,为离散输入矩阵,δt为采样周期。
[0050]
依据响应数据y(k)来预测系统的不平衡力f(k),对于零初始条件来说,可得任意时刻系统的输出y(k)
[0051][0052]
式中权重矩阵hi表示为h0=d,hi=ca
i-1
b(i=1,2,3...)
[0053]
通过对上式推导,可得到不平衡力识别系统模型:
[0054][0055]
式中
[0056][0057]
本发明的具体改进之处在于步骤4)中采用考虑陀螺效应的降阶模型构建了不平衡力识别系统模型,避免了传统方法模态扩展技术的应用,可以实现测量点数较小的情况下不平衡力的准确识别。
[0058]
本发明的改进之处在于,步骤4)包括:
[0059]
采用tikhonov正则化方法求解步骤3)中建立的不平衡力识别系统模型,其正则化解为:
[0060][0061]
式中α为正则化参数,本方法采用l曲线准则确定正则化参数α,通过以上方法即可
求取转子-支承系统在各个时刻的不平衡力。
[0062]
本发明的改进之处在于,步骤5)包括:
[0063]
采用频谱校正方法提取步骤4)计算得到的不平衡力的频率、幅值和相位。当采用矩形窗时,信号的频率、幅值和相位的校正公式如下:
[0064]
频率的校正公式为:
[0065][0066]
式中k δk为采用重心法用主瓣中两个相邻的具有最高幅度的两个谱线确定的主瓣横坐标,fs为采样频率,n为采样点数量,y
k-1
为对应谱线处的幅值,k为谱线的横坐标(k=0~n/2-1),
[0067]
幅度校正公式为:
[0068][0069]
相位的校正公式为
[0070][0071]
式中δψ=-kπ,rk和ik分别为fft变换的实部与虚部。至此可得到转子-支承系统的不平衡参数。
[0072]
本发明的具体改进之处在于步骤5)中采用频谱校正法识别不平衡参数,避免了传统方法采用最小二乘建立目标函数时使用优化算法陷入的局部最优问题,实现了不平衡故障参数的准确快速提取。
[0073]
与现有技术相比,本发明的有益效果是:
[0074]
现有的基于模型的不平衡参数识别方法,当测量点数较少时,存在识别误差较大的问题,而且不同的测量位置对识别结果也有较大的影响。为解决以上问题,本发明建立动力学模型时考虑了陀螺效应的影响,使发明的方法适用于转子半径较大的转子;本发明所采用的降阶方法考虑了陀螺效应的影响,保证了降阶模型的精度;本发明采用降阶模型建立不平衡力识别系统模型,避免了传统方法应用模态扩展技术所引入的误差;本发明采用频谱校正技术提取不平衡参数,避免了传统方法应用优化算法时引入的局部最优问题。通过实施本发明的不平衡参数识别方法,可以在仅有一个测量位置(x和y两个测量方向)的情况下,实现不平衡参数的准确高效识别。
附图说明
[0075]
图1是本发明的一种基于模型的单盘转子不平衡参数识别方法的原理图;
[0076]
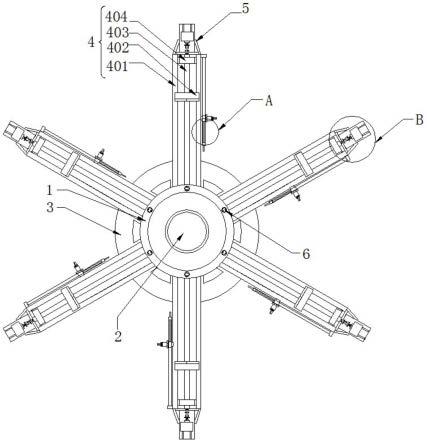
图2是本发明实施例中,单盘转子-支承系统的模型示意图;
[0077]
图3是本发明实施例中,当转速为80hz时,本发明方法识别的不平衡力与施加的不平衡力的比较;
[0078]
图4是本发明实施例中,步骤5)中所采用的频谱校正法的原理示意图。
具体实施方式
[0079]
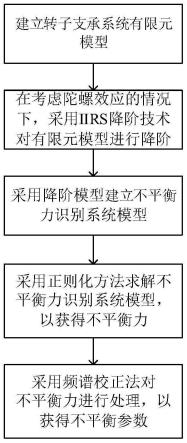
在本实施例的一种基于模型的单盘转子不平衡参数识别方法的原理图如图1所示,主要包括以下步骤:
[0080]
1)建立单盘转子-支承系统有限元模型;
[0081]
2)在考虑陀螺效应的情况下,采用iirs降阶技术对步骤1)中的有限元模型进行降阶;
[0082]
3)采用步骤2)中获得的降阶模型建立不平衡力识别系统模型;
[0083]
4)采用正则化方法求解步骤3)中建立的不平衡力识别系统模型,以获得不平衡力;
[0084]
5)采用频谱校正法对步骤4)中获得的不平衡力进行处理,以获得不平衡参数(幅度和相位);
[0085]
其中,步骤1)包括:
[0086]
考虑转子-支承系统的陀螺效应,建立转子-支承系统的运动方程
[0087][0088]
式中,m为质量矩阵,c为阻尼矩阵,g为陀螺矩阵,k为刚度矩阵,f为不平衡力向量,q为位移响应向量;
[0089]
步骤2)包括:
[0090]
采用iirs降阶技术对步骤1)中的模型矩阵m、c、g、k进行降阶,得到降阶后的质量、阻尼、陀螺和刚度矩阵:mr、cr、gr、kr,具体步骤参照如下:
[0091]
步骤2.1)在动态矩阵降阶技术中,全模型的总自由度2n通常分为主自由度2m(在简化模型中保留,在本文中总是包括测量和存在不平衡力的自由度)和从自由度2s(省略)。按照选定的主、从自由度的顺序调整模型矩阵,得到各分块矩阵:
[0092]mmm
,m
ms
,m
sm
,m
ss
,c
mm
,c
ms
,c
sm
,c
ss
,g
mm
,g
ms
,g
sm
,g
ss
,k
mm
,k
ms
,k
sm
,k
ss
[0093]
步骤2.2)构建状态空间模型分块矩阵a,b,bc,bg:
[0094][0095]
步骤2.3)按如下过程进行迭代计算
[0096]
①
假设转化矩阵的初始值:
[0097][0098]
②
计算聚缩后的矩阵:
[0099]
t
[k]
=[i(t
[k]
)
t
]
t
[0100][0101][0102]
[0103][0104]
③
计算迭代后的转换矩阵:
[0105][0106]
④
计算结构模型缩聚后的复特征方程对应的复特征值λj,并按照特征值虚部ωj(即有阻尼自振频率数值)从小到大排列:
[0107][0108]
λj=-εj±
iωj[0109]
⑤
分别计算复特征值实部和虚部的相对误差:
[0110][0111]
式中ξ为事先给定的容许最大误差;
[0112]
⑥
重复
②
~
⑤
步,直至满足要求,退出循环;
[0113]
步骤2.4)整理迭代p次后的矩阵,得到缩聚后的模型矩阵为:
[0114][0115]
到此我们可得降阶后的mr,cr,gr和kr;
[0116]
步骤3)包括:
[0117]
由降阶后的矩阵,得到连续时间状态空间方程和观测方程:
[0118][0119]
式中为状态向量,为系统矩阵,为输入影响矩阵,其中s为不平衡力的选择矩阵,y(t)为输出向量。当选用电涡流传感器作为采集转子-支承系统位移的传感器时,c=[sd]为状态输出矩阵,其中sd为系统位移选择矩阵,此时,直接传输矩阵d为零矩阵。
[0120]
由于测量通常在离散状态下进行,即在时刻kδt时进行测量,故需对上述方程进行离散化,得到下述方程:
[0121]
x
k 1
=axk bfk[0122]
yk=cxk dfk[0123]
式中xk=x(kδt)为离散状态向量,a=exp(acδt)为离散的状态矩阵,为离散输入矩阵,δt为采样周期。
[0124]
依据响应数据y(k)来预测系统的不平衡力f(k),对于零初始条件来说,可得任意时刻系统的输出y(k)
[0125]
[0126]
式中权重矩阵hi表示为h0=d,hi=ca
i-1
b(i=1,2,3...)。
[0127]
通过对上式推导,可得到不平衡力识别系统模型:
[0128][0129]
式中
[0130][0131]
步骤4)包括:
[0132]
采用tikhonov正则化方法求解步骤3)中建立的不平衡力识别系统模型,其正则化解为:
[0133][0134]
式中α为正则化参数,本方法采用l曲线准则确定正则化参数α,通过以上方法即可求取转子-支承系统在各个时刻的不平衡力。
[0135]
步骤5)包括:
[0136]
采用频谱校正方法提取步骤4)计算得到的不平衡力的频率、幅值和相位。当采用矩形窗时,信号的频率、幅值和相位的校正公式如下:
[0137]
频率的校正公式为:
[0138][0139]
式中k δk为采用重心法用主瓣中两个相邻的具有最高幅度的两个谱线确定的主瓣横坐标,fs为采样频率,n为采样点数量,y
k-1
为对应谱线处的幅值,k为谱线的横坐标(k=0~n/2-1),
[0140]
幅度校正公式为:
[0141][0142]
相位的校正公式为:
[0143][0144]
式中δψ=-kπ,rk和ik分别为fft变换的实部与虚部。至此可得到转子-支承系统的不平衡参数。
[0145]
为验证本发明的不平衡参数识别方法的有效性和优越性,采用图2所示的转子-支承系统进行仿真验证,如图2所示,电涡流位移传感器分别放置于测量点x和y方向。仿真基于测量点的位移响应对转子-支承系统的不平衡参数进行识别,其中,测量点的转子位移数据采用全阶模型计算。当施加的不平衡量为8
×
10-3
kg
·
m(-130
°
),经过步骤1)至步骤4)的计算后,图3为在转速为80hz时应用本发明方法识别的不平衡力与施加的不平衡力的比较。
图4为步骤5)中频谱校正法的原理示意图,应用频谱校正法处理上一步骤中识别的不平衡力,即可得到单盘转子的不平衡参数,其识别结果件表1第2行。表1其余行分别为应用本发明方法在转速分别为120hz和160hz时的识别的单盘转子的不平衡参数。从表1的结果中可以看出,本发明所提供的不平衡参数识别方法可以基于一个测点的振动数据,对单盘转子的不平衡参数进行高效准确地识别。
[0146]
表1不同转速条件下发明方法的不平衡参数识别结果
[0147][0148]
以上实施例仅是一种本发明的技术方案的优选实施方式,尽管上述实施例对本发明的技术方案进行了详细的说明,但是本发明“一种基于模型的单盘转子不平衡参数识别方法”的保护范围并不局限于上述实施例,应当指出,对本领域内的技术人员来说,所有未脱离本发明精神和范围的任何改进或者同等变换,均在本发明的权利要求保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。