技术特征:
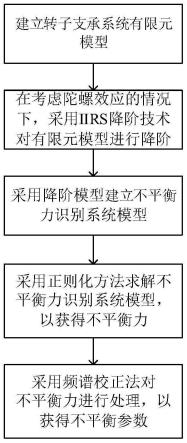
1.一种基于模型的、采用时域响应信号提取转子不平衡参数的方法,其特征在于,方法采用以下步骤:1)建立单盘转子-支承系统有限元模型;2)在考虑陀螺效应的情况下,采用iirs降阶技术对步骤1)中的有限元模型进行降阶;3)采用步骤2)中获得的降阶模型建立不平衡力识别系统模型;4)采用正则化方法求解步骤3)中建立的不平衡力识别系统模型,以获得不平衡力;5)采用频谱校正法对步骤4)中获得的不平衡力进行处理,以获得不平衡参数(幅度和相位);其中,步骤1)包括:考虑转子-支承系统的陀螺效应,建立转子-支承系统的运动方程式中,m为质量矩阵,c为阻尼矩阵,g为陀螺矩阵,k为刚度矩阵,f为不平衡力向量,q为位移响应向量;步骤2)包括:采用iirs降阶技术对步骤1)中的模型矩阵m、c、g、k进行降阶,得到降阶后的质量、阻尼、陀螺和刚度矩阵:m
r
、c
r
、g
r
、k
r
,具体步骤参照如下:步骤2.1)在动态矩阵降阶技术中,全模型的总自由度2n通常分为主自由度2m(在简化模型中保留,在本文中总是包括测量和存在不平衡力的自由度)和从自由度2s(省略)。按照选定的主、从自由度的顺序调整模型矩阵,得到各分块矩阵:m
mm
,m
ms
,m
sm
,m
ss
,c
mm
,c
ms
,c
sm
,c
ss
,g
mm
,g
ms
,g
sm
,g
ss
,k
mm
,k
ms
,k
sm
,k
ss
步骤2.2)构建状态空间模型分块矩阵a,b,b
c
,b
g
:步骤2.3)按如下过程进行迭代计算
①
假设转化矩阵的初始值:
②
计算聚缩后的矩阵:t
[k]
=[i (t
[k]
)
t
]
tttt
③
计算迭代后的转换矩阵:
④
计算结构模型缩聚后的复特征方程对应的复特征值λ
j
,并按照特征值虚部ω
j
(即有阻尼自振频率数值)从小到大排列:λ
j
=-ε
i
±
iω
j
⑤
分别计算复特征值实部和虚部的相对误差:式中ξ为事先给定的容许最大误差;
⑥
重复
②
~
⑤
步,直至满足要求,退出循环;步骤2.4)整理迭代p次后的矩阵,得到缩聚后的模型矩阵为:到此我们可得降阶后的m
r
,c
r
,g
r
和k
r
;步骤3)包括:由降阶后的矩阵,得到连续时间状态空间方程和观测方程:式中为状态向量,为系统矩阵,为输入影响矩阵,其中s为不平衡力的选择矩阵,y(t)为输出向量。当选用电涡流传感器作为采集转子-支承系统位移的传感器时,c=[s
d
]为状态输出矩阵,其中s
d
为系统位移选择矩阵,此时,直接传输矩阵d为零矩阵。由于测量通常在离散状态下进行,即在时刻kδt时进行测量,故需对上述方程进行离散化,得到下述方程:x
k 1
=ax
k
bf
k
y
k
=cx
k
df
k
式中x
k
=x(kδt)为离散状态向量,a=exp(a
c
δt)为离散的状态矩阵,为离散输入矩阵,δt为采样周期。依据响应数据y(k)来预测系统的不平衡力f(k),对于零初始条件来说,可得任意时刻系统的输出y(k)式中权重矩阵h
i
表示为h0=d,h
i
=ca
i-1
b(i=1,2,3...)通过对上式推导,可得到不平衡力识别系统模型:式中
步骤4)包括:采用tikhonov正则化方法求解步骤3)中建立的不平衡力识别系统模型,其正则化解为:式中α为正则化参数,本方法采用l曲线准则确定正则化参数α,通过以上方法即可求取转子-支承系统在各个时刻的不平衡力;步骤5)包括:采用频谱校正方法提取步骤4)计算得到的不平衡力的频率、幅值和相位。当采用矩形窗时,信号的频率、幅值和相位的校正公式如下:频率的校正公式为:式中k δk为采用重心法用主瓣中两个相邻的具有最高幅度的两个谱线确定的主瓣横坐标,f
s
为采样频率,n为采样点数量,y
k-1
为对应谱线处的幅值,k为谱线的横坐标(k=0~n/2-1);幅度校正公式为:相位的校正公式为:式中δψ=-kπ,r
k
和i
k
分别为fft变换的实部与虚部,至此可得到转子-支承系统的不平衡参数。2.根据权利要求书中1所述的一种基于模型的、采用时域响应信号提取转子不平衡参数的方法,其特征在于,步骤2)中,在采用iirs降阶技术对转子-支承系统进行降阶时,考虑了陀螺效应的影响。3.根据权利要求书中1所述的一种基于模型的、采用时域响应信号提取转子不平衡参数的方法,其特征在于,步骤3)中,采用降阶模型建立了不平衡力识别系统模型。4.根据权利要求书中1所述的一种基于模型的、采用时域响应信号提取转子不平衡参数的方法,其特征在于,步骤5)中,采用频谱校正的方法提取不平衡参数(幅度和相位)。
5.根据权利要求书中1,2,3,4所述的一种基于模型的、采用时域响应信号提取转子不平衡参数的方法,其特征在于,所述识别方法对测量位置不敏感,而且能够有效改善不平衡参数的识别精度。
技术总结
本发明为一种基于模型的单盘转子不平衡参数识别方法,是一种基于模型的、采用时域响应信号提取转子不平衡参数的方法。方法首先建立转子-支承系统有限元模型,之后采用考虑陀螺效应的IIRS降阶技术对有限元模型进行降阶,之后基于降阶模型建立不平衡力识别系统模型,通过正则化方法的求解可以实现在仅有一个测量位置情况下的不平衡力的准确计算,之后,方法采取频谱校正技术提取不平衡参数。本发明能够基于一个测量位置(x和y两个方向)的振动数据高准确地识别转子系统的不平衡参数,并且方法对测量位置不敏感,便于工程应用。便于工程应用。便于工程应用。
技术研发人员:崔继文 孙逊 陈越 谭久彬
受保护的技术使用者:哈尔滨工业大学
技术研发日:2022.08.04
技术公布日:2022/12/19
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。