1.本发明属于汽车检测教学技术领域,尤其是涉及一种商用车道路试验检测技术培训方法及装置。
背景技术:
2.随着我国经济的飞速发展,大量的货运车辆、工程用车等商用车广泛应用。商用车道路试验是检验车辆安全与否的重要手段,由于车辆应用条件十分复杂,因此检测条件也相对苛刻,试验流程复杂、危险系数高,导致绝大多数现有针对商用车的检测为一驾一检(一名驾驶员和一名检测人员)的方式。学习人员无法直观地以第一视角进行学习,导致学习效果差、教学效率低,增加了检测方法学习推广的局限性。
3.现有的试验方法教学主要以理论教学为主或是每次测试开始前检测人员在试验场地外现场指导的方式间歇性的开展教学,学习效果较差,消耗的时间和成本较高;故此,本专利申请设计了一种商用车道路试验检测技术培训方法及装置。
技术实现要素:
4.有鉴于此,本发明旨在提出一种商用车道路试验检测技术培训方法及装置,以解决现有的试验方法教学学习效果较差,消耗的时间和成本较高的问题。
5.为达到上述目的,本发明的技术方案是这样实现的:
6.第一方面,本发明提供了一种商用车道路试验检测技术培训方法,包括以下步骤:
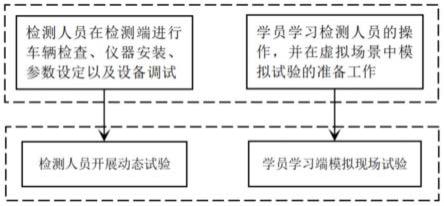
7.s1、检测人员在检测端进行车辆道路试验的准备工作;检测端采集检测人员的语音信息和操作图像信息,并将语音信息和操作图像信息发送至学习端,学习端接收并播放显示该语音信息和该操作图像信息,学员在学习端模拟学习检测人员的操作,并在虚拟场景中模拟试验的准备工作;
8.s2、检测人员开展车辆道路动态试验,检测端采集动态试验路况场景信息,并实时传输至学习端,学生根据实时采集的场景信息进行模拟场景下的动态模拟试验操作。
9.进一步的,步骤s1具体包括如下方法:
10.在检测端进行车辆道路试验的准备工作包括:测试设备安装、测试车辆参数设定以及测试设备的调试工作;
11.调试工作完成后,检测人员陈述准备工作中每一步的操作,并对重点步骤详细讲解,检测端采集检测人员的语音信息,并将语音信息发送至学习端;
12.检测端采集试验车辆驾驶室内操作图像,并对采集到的操作图像信息进行数据处理,处理后的操作图像信息以三维操作场景的形式显示出来。
13.进一步的,步骤s1还包括:学员根据播放的语音信息和显示的三维操作场景,学习检测人员的准备工作流程,并在虚拟场景中进行试验准备工作的虚拟操作。
14.进一步的,步骤s2具体包括如下方法:
15.准备工作就绪后,将试验车辆行驶到试验路面开展试验;
16.检测端采集动态试验路况场景信息,对所述场景信息进行数据处理得到三维行驶场景,并显示该三维行驶场景;
17.检测人员陈述检测过程中的每一步的操作,对重点步骤详细讲解,检测端采集检测人员的语音信息,并将语音信息发送至学习端,学员学习试验过程中检测人员的操作指令,并进行虚拟操作,模拟感受试验过程中的车辆运行情况。
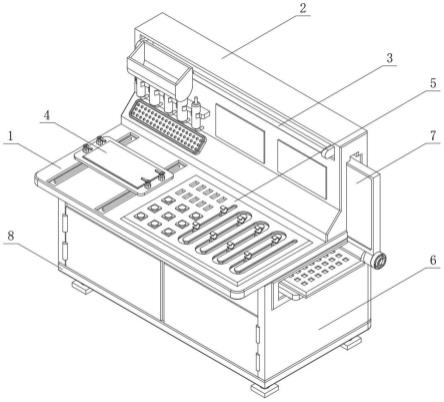
18.第二方面,本发明提供了一种应用如第一方面所述的一种商用车道路试验检测技术培训方法的商用车道路试验检测技术培训装置,所述培训装置包括:检测端设备和学习端设备;
19.所述检测端设备包括第一图像采集装置、第二图像采集装置、检测装置和语音采集装置;第一图像采集装置用于采集检测人员的试验操作场景信息,第二图像采集装置用于采集试验过程中的路况变化场景信息,检测装置用于检测副驾驶位的速度变化、转向角度变化,并将采集到的速度数据和转向角度数据传输给学习端设备,语音采集装置用于采集检测人员的语音信息;
20.所述学习端设备包括图像显示装置、图像处理装置、仿真座椅、操作手柄,扬声器;图像处理装置与图像采集装置通过无线网络连接,将接收到的图像信息转化为可用于图像显示装置显示的三维场景,学员根据检测人员的操作步骤,利用操作手柄在虚拟显示场景中进行相应操作,仿真座椅用于模拟试验过程中的路况场景,扬声器用于实时接收语音收集装置采集到的语音信息,并进行播放。
21.进一步的,仿真座椅包括安全带、底座、转向机构、摇摆机构、处理器和电控装置;
22.处理器根据接收到的速度数据和转向角度数据得到实际的加速度、转向角度以及摆动值,并处理得到所述仿真座椅的控制信号,电控装置根据控制信号控制所述仿真座椅倾斜和转动,使所述仿真座椅与副驾驶座椅的运动一致;
23.摇摆机构和转向机构用于模拟车辆试验过程中的车辆状态变化,以及因各轴制动力不均匀、车轮两侧路面附着系数差异因素导致的侧滑、旋转情况;
24.转向机构包括转向轴和控制电机,转向轴下端与控制电机输出端连接,转向轴上端与底座底面中心连接,控制电机设置在底座上,电控装置根据相应信号控制转向轴动作;
25.摇摆机构包括摇摆电机,摇摆电机设置在底座下方,用于控制所述仿真座椅摇摆。
26.进一步的,速度数据包括车辆运行曲率半径r,计算公式为:
[0027][0028]
其中,vforward为瞬时车速,angrate为瞬时角速度。
[0029]
进一步的,还包括车辆瞬时侧向加速度,计算公式如下:
[0030][0031]ay
为车辆瞬时侧向加速度,a'y为加速度传感器采集的侧向加速度,g为重力加速度,φ为车身侧倾角。
[0032]
相对于现有技术,本发明所述的一种商用车道路试验检测技术培训方法及装置具有以下有益效果:
[0033]
(1)本发明所述的一种商用车道路试验检测技术培训方法及装置通过全程采集检
测工作流程,并传输到学习端进行显示,检测端与学习端一致性高,学员学习端操作与试验测试同步进行,实现多人同时同步学习,有利于检测方法的推广。
[0034]
(2)本发明所述的一种商用车道路试验检测技术培训方法及装置通过座椅的转向机构和摇摆机构能够实现车辆状态的实时模拟,实现安全模拟,保证学习者的安全;
[0035]
(3)本发明所述的一种商用车道路试验检测技术培训方法及装置通过高精度轮速传感器与雷达测速仪对标,确定试验车辆滚动半径,提高试验车辆瞬时速度的准确度,进而提高检测方法的准确性。
附图说明
[0036]
构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
[0037]
图1为本发明实施例所述的基于虚拟现实技术的检测技术培训装置原理图;
[0038]
图2为本发明实施例所述的检测端与学习端交互过程示意图;
[0039]
图3为本发明实施例所述的虚拟场景中主、副显示区位置示意图。
具体实施方式
[0040]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
[0041]
下面将参考附图并结合实施例来详细说明本发明。
[0042]
请参阅图1所示,实施例一,本发明实施例提供了一种商用车道路试验检测技术培训方法,包括以下步骤:
[0043]
步骤一、检测人员在检测端进行车辆道路试验的准备工作;检测端采集检测人员的语音信息和操作图像信息,并将语音信息和操作图像信息发送至学习端,学习端接收并播放显示该语音信息和该操作图像信息,学员在学习端模拟学习检测人员的操作,并在虚拟场景中模拟试验的准备工作。
[0044]
检测人员进行仪器安装、参数设定以及设备调试等准备工作;检测人员按照试验操作规程和试验要求选择高精度轮速传感器、陀螺仪、测量方向盘、机器人和数据采集器等设备进行安装;
[0045]
高精度轮速传感器安装在试验车辆两侧车轮,可测得精确地轮速,结合车辆滚动半径确定试验车辆瞬时速度;
[0046]
陀螺仪安装于副驾驶座椅刚性结构上,并在陀螺仪中输入车辆参数及其相对于试验车辆的准确坐标,用于测量试验车辆车身侧倾角、侧向加速度和横摆角速度等;
[0047]
测量方向盘安装于试验车辆方向盘上并加固使其与试验车辆方向盘不发生相对运动,用于读取方向盘转角及作用在方向盘上的转矩;
[0048]
机器人安装于驾驶室内与测量方向盘联接,不与驾驶室发生相对运动。输入相应的数据可控制测量方向盘转动速度、角度和转矩等;
[0049]
数据采集器安装于驾驶室内,可根据试验需求与上述设备联接,测得车辆运行曲率半径、横摆角速度、车身侧倾角、侧向加速度、车辆瞬时速度、方向盘转角、方向盘转矩、检测时间等一系列参数,车辆运行曲率半径、横摆角速度、车身侧倾角、侧向加速度既作为试
验车辆检验结果,也作为学习端处理器的导入数据;车辆瞬时速度、方向盘转角、方向盘转矩、检测时间等参数可根据试验需求保存作为试验后处理的原始数据。
[0050]
检测人员陈述准备工作中每一步的操作,对重点步骤详细讲解,语音采装置采集检测人员的语音信息,并将语音信息发送至学习端。
[0051]
第一图像采集装置采集驾驶室内图像,将采集到的图像信息发送至图像处理装置,通过图像处理装置处理得到三维操作场景,将三维操作场景发送至图像显示装置,在图像显示装置的主显示区显示。
[0052]
在学习端,通过扬声器在学习端播放检测人员的语音信息,作为教学过程中的现场指令,使学员了解操作流程重点细节;
[0053]
学员通过扬声器播放的语音信息和图像显示装置显示的三维操作场景,学习检测人员的准备工作流程,利用手柄在虚拟场景中进行试验准备工作的虚拟操作;若在准备过程中有接线错误、参数设置不符等问题,报警器发出视觉警示信号和听觉警示信号,并且视觉警示信号和听觉警示信号一直存在,直至操作正确时止。
[0054]
步骤二、检测人员开展车辆道路动态试验,检测端采集动态试验路况场景信息,并实时传输至学习端,学生根据实时采集的场景信息进行模拟场景下的动态模拟试验操作。
[0055]
准备工作就绪后,由专业驾驶员驾驶试验车辆并根据检验人员指令将试验车辆行驶到试验路面依据相关要求开展试验,第二图像采集装置实时采集试验环境、路面信息等场景信息,将场景信息发送至图像处理装置,通过图形处理装置处理得到三维行驶场景,将三维行驶场景发送至图像显示装置,在图像显示装置的副显示区显示。
[0056]
检测人员陈述检测过程中的每一步的操作,对重点步骤详细讲解,语音采装置采集检测人员的语音信息,并将语音信息发送至学习端。
[0057]
现有测速方法大多采用gps采集测试车速,由于gps系统精度有限,且通常用于测量一段时间内的平均速度,以此来用作测试车速,结果存在一定误差;本发明采用高精度轮速传感器测得车辆瞬时轮速n,结合车辆滚动半径测得滚动半径i,得到更准确地车辆瞬时速度vforward,计算公式如下:
[0058]
vforward=2πi
·
n;
[0059]
由于不同车辆滚动半径存在差异,为了使滚动半径值更准确,每次试验前采用雷达测速仪监测车辆瞬时速度,通过对标雷达测速仪测得的车辆瞬时速度v调整滚动半径i的数值,使其满足:
[0060][0061]
此时高精度轮速传感器得到的车辆瞬时速度vforward与雷达测速结果v一致。
[0062]
检测端采集车辆瞬时速度和横摆角速度计算车辆运行曲率半径r:
[0063][0064]
其中,vforward为车辆瞬时速度,angrate为瞬时角速度,学习端仿真座椅根据车辆运行运行曲率半径值r调整学员座椅姿态。
[0065]
在调整学员姿态同时为了使其有相同的感受还需计算每个时刻的侧向加速度ay:
[0066][0067]ay
为瞬时侧向加速度,a'y为加速度传感器指示的侧向加速度,g为重力加速度,为车身侧倾角,由陀螺仪采集。
[0068]
试验车辆行驶过程中,通过高精度轮速传感器、数据采集器、陀螺仪等设备得到车辆瞬时速度、横摆角速度、车身侧倾角、侧向加速度、车辆运行曲率半径等信息,经处理器处理后得到副驾驶实际的瞬时侧向加速度、座椅侧倾角,座椅偏转角度,进而得到的座椅的控制信号,电控装置根据控制信号控制座椅倾斜和转动,使座椅与副驾驶座椅的运动一致,使学员能够感受试验过程中的车辆运动情况。
[0069]
在控制座椅运动的同时,通过图像显示装置的副显示区显示试验车辆行驶过程中的试验环境、路面信息,使学员产生身临其境的感受。
[0070]
试验过程中通过座椅上的扬声器进行播放检测人员的语音信息,使学员学习试验过程中检测人员的操作指令。
[0071]
如图2所示,实施例二,本发明实施例还提供了一种应用如实施例一所述的一种商用车道路试验检测技术培训方法的商用车道路试验检测技术培训装置,所述培训装置包括:检测端设备和学习端设备;
[0072]
所述检测端设备包括图像采集装置、检测装置和语音采集装置;
[0073]
图像采集装置(可以是摄像头)设置于试验车辆驾驶室内部,包括第一图像采集装置和第二图像采集装置,第一图像采集装置固定于副驾驶位座椅头枕左侧,用于采集检测人员的试验操作场景,第二图像采集装置安装于前风挡玻璃上部位置,用于采集试验过程中的路况变化场景,包括试验环境、路面信息等场景信息。
[0074]
检测装置,包括高精度轮速传感器、陀螺仪、测量方向盘、机器人和数据采集器等;
[0075]
高精度轮速传感器安装在试验车辆两侧车轮,可测得精确地轮速,结合车辆滚动半径确定试验车辆瞬时速度;
[0076]
陀螺仪安装于副驾驶座椅刚性结构上,并在陀螺仪中输入车辆参数及其相对于试验车辆的准确坐标,用于测量试验车辆车身侧倾角、侧向加速度和横摆角速度等;
[0077]
测量方向盘安装于试验车辆方向盘上并加固使其与试验车辆方向盘不发生相对运动,用于读取方向盘转角及作用在方向盘上的转矩;
[0078]
机器人安装于驾驶室内与测量方向盘联接,不与驾驶室发生相对运动。输入相应的数据可控制测量方向盘转动速度、角度和转矩等;
[0079]
数据采集器安装于驾驶室内,可根据试验需求与上述设备联接,测得车辆运行曲率半径、横摆角速度、车身侧倾角、侧向加速度、车辆瞬时速度、方向盘转角、方向盘转矩、检测时间等一系列参数,车辆运行曲率半径、横摆角速度、车身侧倾角、侧向加速度既作为试验车辆检验结果,也作为学习端处理器的导入数据;车辆瞬时速度、方向盘转角、方向盘转矩、检测时间等参数可根据试验需求保存作为试验后处理的原始数据。
[0080]
语音采集装置,安装于副驾驶位顶部右侧,用于采集检测人员的语音信息。
[0081]
所述学习端设备包括图像显示装置、图像处理装置、仿真座椅、操作手柄,扬声器;
[0082]
图像处理装置,与图像采集装置通过无线网络连接,将接收到的图像信息转化成可用于图像显示装置显示的三维场景。图像处理装置的输出端与图像显示装置的输出端连
接,将三维场景传输到图像显示装置中进行显示。
[0083]
图像显示装置(可以是vr显示屏或vr眼镜),用于实时接收从图像处理装置传输的数据信息,图像显示装置呈现的是驾驶室和道路信息的虚拟场景,场景中设置汽车道路试验所需的仪器设备,这些设备用于学习人员模拟试验前的准备工作。如图3所示,虚拟场景的前风挡玻璃设置为主显示器和副显示区两个区域,整个前风挡玻璃范围为主显示区,用于显示检测端驾驶室内检测人员的操作图像,副显示区位于主显示区右下角位置,用于显示检测端试验车辆行驶过程中路况场景,使学习人员能够观察到检测人员的操作步骤以及试验过程中的路况变化情况。
[0084]
手柄:学员根据检测人员的操作步骤,利用手柄在虚拟显示场景中按步骤进行相应操作;学生端还设置警报模块,用于当学员出现危险操作、错误接线、参数设置不符等问题时,发出警示。
[0085]
高精度轮速传感器测得精确地轮速,结合车辆滚动半径确定试验车辆瞬时速度,陀螺仪测量试验车辆车身侧倾角、侧向加速度和横摆角速度等,数据采集器根据试验需求与上述设备联接,输入所需算法获取并显示车辆瞬时速度、横摆角速度、车身侧倾角、侧向加速度、车辆运行曲率半径等一系列参数。
[0086]
仿真座椅,包括安全带、底座、转向机构、摇摆机构、处理器和电控装置;处理器根据接收到的车辆瞬时速度、横摆角速度、车身侧倾角、侧向加速度、车辆运行曲率半径等信息经数据处理后得到仿真座椅的控制信号,电控装置根据控制信号控制座椅倾斜和转动,使座椅与副驾驶座椅的运动一致。
[0087]
摇摆机构和转向机构用于模拟车辆试验过程中的车辆状态变化,以及因各轴制动力不均匀、车轮两侧路面附着系数差异等因素导致侧滑、旋转等情况。
[0088]
转向机构包括转向轴和控制电机,转动轴下端与控制电机输出端连接,转动轴上端与底座底面中心连接,控制电机设置在底座上。电控装置根据相应信号控制传动轴动作。
[0089]
摇摆机构包括摇摆电机,摇摆电机设置在底座下方,用于控制座椅摇摆。
[0090]
当车辆匀速行驶时,座椅保持稳定状态。
[0091]
当速度变化时
[0092]
当轮速传感器检测到车辆为减速时,控制仿真座椅向后加速运动产生与检测端副驾驶座椅相应的减速度;当轮速传感器检测到车辆为加速时,控制仿真座椅向前加速运动产生与检测端副驾驶座椅相应的加速度。
[0093]
当试验车辆发生转向时
[0094]
当车辆向转向,控制仿真座椅根据车辆运行曲率半径和侧向加速度调整倾斜角度并旋转,倾斜角度与侧向加速度成比例;利用试验车辆转向时的车辆瞬时速度和曲率半径,通过积分计算获得车辆的瞬时转向角度,座椅的旋转角度与车辆转向角度一致。
[0095]
扬声器,设置在仿真座椅椅背上端左右两侧,用于实时接收语音收集装置采集到的语音信息,并进行播放。
[0096]
具体实施例如下:
[0097]
用于防抱制动性能试验的学习;检测过程涉及不同载荷、不同附着系数路面以及不用车速的多种工况,试验过程复杂、危险系数较高;以n3类载货汽车为例,检测端检测人员在动态测试前进行试验的准备工作,检测人员正确连接高精度轮速传感器、压力传感器、
车速仪和数据采集器等设备,并进行相应的参数设定,如压力传感器的工作电压和量程范围、高精度轮速传感器的滚动半径等。操作过程由第一图像采集装置采集、操作指令由语音采集装置采集并实时传输至学习端。
[0098]
学习端图像处理装置对检测端的图像信息接收并处理,处理后的图像信息显示在主显示区;操作指令经扬声器播放。学习人员依据主显示区内容和操作指令依次完成相应准备工作。若学习人员准备过程中有接线错误、参数设置不符等问题,如:高精度轮速传感器参数设置错误,此时警报器发出语音提示并在主显示区左上角显示闪烁的叹号图像,至学员将错误纠正时,语音提示和叹号图像消失。
[0099]
准备工作就绪,检测端检测人员将试验车辆行驶到试验路面依据法规要求开展试验。将车辆停在发车位置,加速至规定速度行驶到指定路面,到达指定路面后快速制动,使试验车辆停止。在这个过程中,检测端检测装置采集副驾驶座椅的速度变化和转向角度变化。将采集到的速度数据和转向数据、第二图像采集装置将采集到的动态试验的路况场景实时传输至学习端。学习端处理器根据接收到的速度数据和转向数据得到实际的加速度、转动角度以及摆动值,并处理得到的座椅的控制信号,电控装置根据控制信号控制座椅倾斜和转动,使座椅与副驾驶座椅的运动一致。
[0100]
试验过程中也会遇到因车辆制动力不均、路面水膜不均、abs失效等问题引起的车辆侧滑或旋转等危险情况。学习端可同时接收该运动数据,控制座椅在电控装置的作用下完成相应的运动,使学员在安全带的保护下既不会受伤,同时能够感受到试验过程中的真实状态。
[0101]
除防抱制动性能试验的学习,本发明的商用车道路试验检测技术培训装置及其培训方法还可以用于商用车辆电子稳定性控制系统性能试验、弯道制动试验、转向力与操纵稳定性试验等试验的教学。
[0102]
本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元及方法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
[0103]
在本技术所提供的几个实施例中,应该理解到,所揭露的方法和系统,可以通过其它的方式实现。例如,以上所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。上述单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本发明实施例方案的目的。
[0104]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
[0105]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。