1.本发明属于流体力学、流动控制领域,具体涉及一种通过主动流动控制实现钝体水动力隐身的实验装置及方法。
背景技术:
2.流体流经钝体后流场会发生显著的变化,例如水流过圆柱会产生卡门涡街,这些非对称,非定常的变化就是钝体与流场相互作用产生的水动力扰动。同样地,当钝体在静水中运动时,也会产生水动力扰动。利用水动力扰动信息进行目标探测是从水生生物群落的捕食关系中发现的新型探测手段。在生物自建立的流场信息与上游目标之间的联系基础之上,通过感知流场中扰动,来判断物体形状和运动状态。主动流动控制能有效改变流场结构,只需在流场中人为地施加微小的扰动,就能达到减阻增升,减振降噪等目的,而利用深度强化学习,还可以实现更为复杂的控制目标。
3.专利cn114323147a公布了一种高灵敏度的水下仿生侧线结构,利用该结构可探测水动力扰动,作为新型水下传感器有效补充了非声探测领域的不足。针对利用水动力扰动进行探测的新型探测手段,亟需发展新型的水动力隐身方法,通过消除钝体在流体中运动产生的水动力扰动,实现水动力隐身。
技术实现要素:
4.要解决的技术问题:
5.为了避免现有技术的不足之处,本发明提供一种通过主动流动控制实现钝体水动力隐身的实验装置及方法,该装置的钝体模型在流体中运动,流场会发生显著改变,而主动流动控制利用发生器在近壁区抽/吸流体,影响剪切层发展,因而能有效改变下游尾涡的形态,实现水动力隐身。
6.本发明的技术方案是:一种通过主动流动控制实现钝体水动力隐身的实验装置,包括水槽、单自由度振动模块、主动控制模块、测速模块、智能体模块,所述水槽为实验提供流体环境;
7.所述单自由度振动模块包括钝体模型、支架和阻尼器;所述钝体模型置于水中,通过支架与水槽滑动连接,能够在水中做模拟运动;所述钝体模型的两侧均设置有阻尼器,以实现钝体在竖直方向上的单自由度振动;
8.所述主动控制模块包括发生器和水泵,所述发生器为排布在钝体模型表面的射流孔,水泵通过导管与发生器连通;
9.所述测速模块设置于钝体模型的后方,用于采集并反馈流场信息;
10.所述智能体模块接收测速模块反馈的流场信息,实时计算控制参数,对水泵的抽水和喷水动作、流速实时控制。
11.本发明的进一步技术方案是:所述支架包括上支杆、侧支杆和下支杆,所述上支杆与水槽相对两侧壁的外缘滑动连接,能够沿水槽侧壁外缘做直线运动;所述钝体模型的两
端与下支杆固定连接;所述下支杆的两侧外端分别通过阻尼器、侧支杆与上方支杆的两端连接。
12.本发明的进一步技术方案是:所述阻尼器包括柱体杆件、外筒和弹簧;所述外筒为底部开口的套筒结构,其顶部开有中心孔;所述柱体杆件沿轴向贯穿外筒,其中部设有限位装置;所述弹簧设置于外筒内,其上端与外筒顶部内端面连接,下端与限位装置的上端面连接;
13.所述柱体杆件的底部通过下支杆连接,所述外筒的侧壁与侧支杆连接;基于弹簧的压缩或拉升作用力,柱体杆件能够相对外筒做轴向运动,因此钝体模型受到外力作用远离弹簧的平衡位置后,会在阻尼器限制下做竖直方向的单自由度振动。
14.本发明的进一步技术方案是:所述钝体模型为中空的圆柱结构,沿周向设置有多个径向射流孔,即发生器。
15.本发明的进一步技术方案是:所述发生器的数量为10个,其中心轴分别与钝体模型圆形截面的水平中心线成夹角θ,θ=0
°
,
±
40
°
,
±
80
°
,
±
120
°
,
±
150
°
,180
°
,位于所述水平中心线两侧的发生器孔径是钝体模型圆形截面周长的1/30,其他位置的发生器孔径是钝体模型圆形截面周长的1/60。
16.本发明的进一步技术方案是:所述发生器的射流作动方向均为水平方向,即仅向水平方向抽/喷水;位于θ=
±
40
°
,
±
80
°
的发生器接收到的控制信号相同,上、下游对应位置发生器,即位于θ= 80
°
和θ= 120
°
、θ= 40
°
和θ= 150
°
、θ=0
°
和θ=180
°
、θ=-40
°
和θ=-150
°
、θ=-80
°
和θ=-120
°
的发生器收到的控制信号相位差为180
°
。
17.本发明的进一步技术方案是:所述测速模块通过连接架与所述单自由度振动模块的支架连接,与钝体模型之间为固定距离;包括测压尾耙、数据线和采集卡,测压尾耙上的传感器以阵列形式布置,并通过数据线与采集卡连接,将流场信息反馈给智能体模块。
18.本发明的进一步技术方案是:所述智能体模块为数据处理终端,包括高性能计算机和单片机,接收所述测速模块获得的流场信息,实时计算控制参数,由所述单片机生成并发送作动信号至主动控制模块。
19.本发明的进一步技术方案是:所述水槽为顶部开口的方槽,其两侧壁的顶端设置有导轨,所述单自由度振动模块的支架和测速模块的连接架均与导轨配合安装,由电机驱动支架沿导轨做直线运动,从而带动单自由度振动模块和测速模块在流体中运动。
20.一种通过主动流动控制实现钝体水动力隐身的方法,具体步骤如下:
21.步骤1:电机开启后,钝体模型在水槽中运动并产生尾涡脱落,此时流体在钝体模型表面产生周期性作用力;流体作用力将阻尼器拉伸或压缩,使得钝体模型沿竖直方向的单自由度振动;
22.步骤2:所述测速模块的测压尾耙获取下游流场中压力,并换算得到流场固定测点处各个方向的速度;
23.步骤3:所述智能体模块接收流场速度信息,计算机进行在线训练,定义尾流速度与参考速度的速度差为目标函数,通过深度强化学习生成控制策略;再利用单片机输出控制信号至主动控制模块,根据控制信号调节水泵动作,进而控制发生器处抽/喷水的速度,调制流场结构。
24.所述发生器为以阵列形式排布在钝体模型周面的射流孔,射流孔底部均与导管连
通,利用水泵向流场中抽/喷,影响尾涡结构;通过主动流动控制,减小钝体经过前后流体的速度亏损,在钝体近场范围外,仅凭速度和涡量信息已经无法感知钝体,实现水动力隐身的目的。
25.有益效果
26.本发明的有益效果在于:
27.1.本发明钝体模型在流体中运动,流场会发生显著改变,而主动流动控制利用发生器在近壁区抽/吸流体,影响剪切层发展,因而能有效改变下游尾涡的形态。
28.2.本发明智能体模块中利用深度强化学习方法,可以接收多个流场测点获得的反馈信息,经过在线计算,对不同位置作动器输出多个控制信号。通过合理设置动作网络和评价网络,可以实现减小钝体经过前后的流体速度亏损这一复杂目标。
29.3.本发明利用深度强化学习生成控制策略,利用主动流动控制调制流场结构,可以有效消除钝体在流体中经过前后的流体速度亏损,在近场范围内,利用水动力探测装置无法获得速度及涡量的变化信息,最终实现水动力隐身。
附图说明
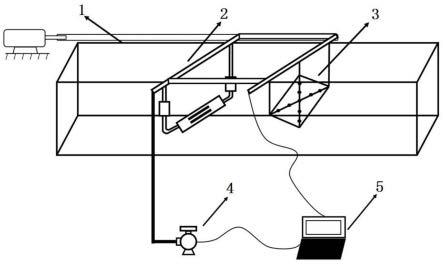
30.图1是本发明中利用主动控制实现钝体水动力隐身的实验装置总体示意图;
31.图2是本发明中单自由度振动模块示意图;
32.图3是本发明中主动流动控制发生器位置示意图;
33.图4是本发明中测速模块位置示意图;
34.图5是本发明中流场与智能体模块交互的示意图;
35.图6是本发明实施效果示意图。
36.附图标记说明:1.水槽,2.单自由度振动模块,3.测速模块,4.主动控制模块,5.智能体模块,2-1.支架,2-2.柱体杆件,2-3.外筒,2-4.弹簧,2-5.钝体模型。
具体实施方式
37.下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
38.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
39.本发明提供了一种通过主动流动控制实现钝体水动力隐身的实验装置,包括如下组成部分:单自由度振动模块,主动控制模块,测速模块,智能体模块以及水槽。单自由度振动模块包括钝体模型,支架和阻尼器。钝体模型内部镂空,以放置导管。钝体模型两端与支架连接,阻尼器安装在支架上,以实现钝体在竖直方向上的单自由度振动。主动控制模块包括发生器、水泵和导管。导管一端连接水泵,一端连接钝体表面的发生器,发生器为排布在钝体表面的射流孔。发生器的作动信号由智能体模块生成并发出,控制水泵来实现抽水和喷水两种动作,流速由水泵实时控制。测速模块包括测压尾耙、数据线和采集卡。测压尾耙
上的传感器以阵列形式布置,具体位置在试验前通过对数值模拟结果进行敏感性分析获得。测压尾耙上传感器通过数据线与采集卡连接,将流场信息反馈给智能体模块。智能体模块为数据处理终端,组成部分包括高性能计算机以及单片机,接收测速模块获得的流场信息,实时计算控制参数,由单片机生成并发送作动信号至主动控制模块。水槽为顶部开口的方槽,且水槽顶端设置导轨,来安装单自由度振模块和测速模块,以上两模块在导轨上的运动由电机控制。
40.所述单自由度振动模块安装在水槽导轨上。电机开启后,钝体在水槽中运动会产生尾涡脱落,此时流体在钝体表面产生周期性作用力,由于钝体通过支架与阻尼器连接,因此钝体上的流体作用力会将阻尼器拉伸或压缩,表现为钝体沿竖直方向的单自由度振动。
41.所述单自由度振动模块与测速模块以固定距离排布在水槽导轨上,测速模块安装在圆柱后方,利用测速模块中的测压尾耙获取下游流场中压力并换算得到流场固定测点处各个方向的速度。
42.所述测速模块中获得的流场速度信息通过数据线和采集卡传入智能体模块。利用智能体模块中的高性能计算机进行在线训练,定义尾流速度与参考速度的速度差为目标函数,通过深度强化学习生成控制策略,利用单片机输出控制信号至主动控制模块,根据控制信号调节水泵来控制发生器处抽/喷水的速度。
43.所述主动控制模块的发生器为以阵列形式排布的射流孔,射流孔底部与导管连通,利用水泵向流场中抽/喷,影响尾涡结构。发生器射流孔沿钝体轴线对称排列。处于上下对称位置的发生器接收到的控制信号相位保持一致。为了保证发生器流入和流出量一致,前后对称位置的发生器接收到的控制信号相位差为180
°
。
44.在单自由度振动模块下游设置测速模块获取流场中速度信息,根据尾迹中的速度信息,在智能体模块中利用深度强化学习制定相应的控制策略,经主动控制模块中发生器向流场中抽/喷水,调制流场结构。通过主动流动控制,减小钝体经过前后流体的速度亏损,在钝体近场范围外,仅凭速度和涡量信息已经无法感知钝体,实现水动力隐身的目的。
45.实施例:
46.本实施例是针对利用水动力扰动进行目标探测的新型探测手段,提供一种通过主动流动控制实现钝体水动力隐身的实验装置,如图1所示,包括如下构成部分:单自由度振动模块2,主动控制模块4,测速模块3,智能体模块5以及水槽1。实现在近场范围内,仅凭涡量和速度信息无法感知钝体。以圆柱这一典型钝体模型作为实例对技术路线进行详细说明。
47.所述单自由度模块2与测速模块3前后排布在导轨上,如图1。两模块由支架连接以保持相对距离一致,并由放置在水槽外部的电机驱动做匀速运动。
48.单自由度模块2如图2所示,图中2-1为支架,2-5为钝体模型,阻尼器包括柱体杆件2-2,、外筒2-3及弹簧2-4。外筒2-3底部开口,上端面为弹簧安装槽,槽与弹簧2-4上部连接,同时在上端面打孔,孔的直径与柱体杆件2-2直径一致,保证柱体杆件2-2可在外筒2-3中自由穿插。柱体杆件2-2中部为柱体杆件上的限位装置。限位装置与弹簧2-4底部连接。阻尼器中柱体杆件仅能沿弹簧压缩或拉升方向运动,柱体杆件底端与安装钝体模型2-5的支架连接。因而钝体受到外力作用远离弹簧的平衡位置后,会在阻尼器限制下做沿竖直方向的单自由度振动。
49.所述主动控制模块4中发生器在圆柱表面排布参考图3,共10个发生器。发生器以与中心线夹角为θ=0
°
,
±
40
°
,
±
80
°
,
±
120
°
,
±
150
°
,180
°
位置排布,位于中心线位置的发生器即3号和8号射流孔开口大小为圆柱周长的1/30,其他开口大小为圆柱周长的1/60,射流作动方向均为水平方向,即仅向水平方向抽/喷水。位于θ=
±
40
°
,
±
80
°
的发生器即1和5,2和4接收到的控制信号相同,上下游对应位置发生器即1和6,2和7,3和8,4和9,5和10收到的控制信号相位差为180
°
。控制信号相同表明发生器同时抽/喷,相反即发生器其中一个抽时,另一个喷。每个发生器抽/喷水的速度由对应的水泵控制。因此,需要从智能体模块中输出三个控制信号。
50.所述测压尾耙中传感器阵列的布置参考图4,在圆柱下游位置w1=2d处设置测压尾耙,其中特征长度d为圆柱的直径,运动过程中测压尾耙与圆柱的距离始终保持不变。测压尾耙选为圆形平面,平面垂直于圆柱的运动方向,传感器布置为:选取n=33个速度传感器在面上排列,具体位置由试验前通过敏感性分析对数值模拟结果进行评估获得,测压尾耙半径为h1=2d,最终测点测得圆柱下游流场中固定位置处的速度信息ui(i=1,2,3),即测压尾耙可以获得n个ui。同时,以圆柱运动速度为参考速度:refui(i=1,2,3),圆柱运动速度可直接由电机测得。定义速度亏损为:
[0051][0052]
本发明的最终目的就是尽量消除圆柱运动引起的流体速度亏损j。
[0053]
在所述智能体模块5中利用深度强化学习方法同步进行计算,输出控制参数。深度强化学习智能体的训练采用近端策略优化模型,与流场交互过程,参考图5:利用传感器测得的流场状态和实际奖励,生成动作影响流场,其中实际奖励为-j。利用神经网络生成策略,主要包括两套网络:动作网络和评价网络。评价网络输入为流场信息,输出为预测奖励,其目标为减小预测奖励与实际奖励差异。动作网络输入为流场信息,输出为控制参数,其目标为提高奖励增益。
[0054]
所述发生器的连续控制通过高斯扰动施加,将标准差作为前后时刻抽/吸的速度变化。传感器测得流场信息传入智能体模块后,经过实时计算,输出标准差作为控制参数。
[0055]
在施加控制之前,首先需要开启电机,驱动圆柱及测速模块匀速运动,周期性涡脱落会导致圆柱表面流体动力的变化,圆柱会发生振动。一段时间后,圆柱处于稳定的振动状态后,随后同步开启主动控制模块及智能体模块。在发生器作动的一个时间间隔内,测速模块将测得的流场测点信息传入智能体模块,智能体模块通过深度强化学习方法进行实时在线计算,输出控制参数至主动控制模块,调节水泵作动,使得对应位置的发生器以不同速度抽/喷水,影响尾涡结构。
[0056]
经过多次学习后的标准差不断缩减,高斯扰动的标准差在常数值附近极小范围内变化,施加连续控制的随机性以及振荡已经被消除,射流速度保持不变。
[0057]
利用主动流动控制实现水动力隐身的效果最后实现的效果参考图6。
[0058]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。