技术特征:
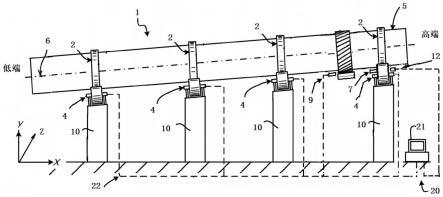
1.一种监测或减少运转中旋转体多个托轮在水平面歪倾的系统,所述旋转体通过筒体外轮带被各轮带下部左右侧设置的托轮所支承,在轮带侧面以接触轮带的方式设置挡轮,挡轮设置有挡轮液压系统;其特征在于:以不改变挡轮液压系统结构的方式,在旋转体的挡轮液压系统油路中安装1个压力传感器,该压力传感器设置为把所测压力信号通过无线或有线方式发给一个计算机系统;以不改变旋转体结构的方式,把1个测距传感器平行于旋转体轴线安装到旋转体某一个固定结构件的端平面附近,该测距传感器设置为把所测旋转体轴向位移的位置通过无线或有线方式发给所述计算机系统;所述某一个固定结构件为某旋转体上套设的大齿圈或挡轮;以不改变托轮结构的方式,把测量传感器分别安装到旋转体的每一个托轮外壳上、或每一个托轮的轴体旁、或每一个托轮的轮幅结构旁;每一个所述测量传感器各自通过无线或有线方式与所述计算机系统连接,用于监测每一个托轮各自承受的由旋转体轴向力特载荷所产生的特性信号。2.根据权利要求1所述的监测或减少运转中旋转体多个托轮在水平面歪倾的系统,其特征在于所述测量传感器是位移传感器或倾斜传感器;当采用位移传感器时,则该每一个位移传感器均平行于各自托轮轴线安装在托轮某一侧轴向端面处,该端面处位于每一个托轮轴某一端的端平面、或在托轮轴体结构某一端的端平面、或在托轮轮幅结构某一端的端平面;以分别实时监测每一个托轮的轴向距离差值的函数信号,所述轴向距离差值为托轮轴中点与托轮轴向力“中性点”之间的差值;该函数信号中包含有距离差值及正负号,该距离差值的绝对值与旋转体在每个托轮上产生的轴向力载荷成正比;该距离差值的正负号用于判断每一个托轮对旋转体推力的方向;当采用倾斜传感器时,则该每一个倾斜传感器均平行于各自托轮轴线安装在托轮外壳某个位置上;以分别实时监测每一个托轮的当前轴向倾斜角度与“理想零角度位置”的变化差值的函数信号,该函数信号中包含有轴向倾斜角度差值及倾斜角度的正负号,该轴向倾斜角度差值的绝对值与旋转体在每个托轮上产生的轴向力载荷成正比;该倾斜角度的正负号用于判断每一个托轮对旋转体推力的方向;所述位移传感器或倾斜传感器各自的数量至少与旋转体所有托轮的总数量相同。3.根据权利要求1所述的监测或减少运转中旋转体多个托轮在水平面歪倾的系统,其特征在于所述测量传感器为位移传感器,计算机系统通过连接每一个位移传感器来分别实时监测每一个托轮的轴向距离差值的函数信号,所述轴向距离差值为托轮轴中点与托轮轴向力“中性点”之间的差值;其中,托轮轴向力“中性点”表示为(gl gh)/2,gh和gl分别是托轮与其高端轴瓦和低端轴瓦的间隙值;所述低端与所述高端沿着旋转体轴线方向设置。4.根据权利要求1所述的监测或减少运转中旋转体多个托轮在水平面歪倾的系统,其特征在于所述的1个压力传感器不改变挡轮液压系统结构就能拆卸;所述测定旋转体轴向位置的1个测距传感器不改变旋转体结构就能拆卸;所述测量传感器均在不改变托轮结构前提下就能拆卸;所述的旋转体是一个具有≥2组的轮带及托轮组回转窑,左右侧托轮为一组。5.根据权利要求1所述的监测或减少运转中旋转体多个托轮在水平面歪倾的系统,其特征在于其所述测量传感器为非接触磁电、或激光、或光电感应类的位移传感器、或是接触
式光栅容栅类、或电磁容栅感应类的位移传感器;或者是电子类倾斜角度传感器、或电解式倾斜角度传感器;所述测距传感器是非接触磁电、或激光、或光电、或超声波感应类距离传感器,或是接触式光栅、或容栅类、或电磁容栅感应类的位移传感器;所述的1个压力传感器是数字式压力传感器。6.根据权利要求1所述的监测或减少运转中旋转体多个托轮在水平面歪倾的系统,其特征在于所述压力传感器和测距传感器及所有测量传感器均各自通过有线的物理信号、无线信号或其组合电子方式的线路与一个计算机系统连接通信;所述压力传感器和测距传感器及所有测量传感器均由可充电电池或有线电源供电。7.一种监测运转中旋转体多个托轮在水平面歪倾的方法,其特征在于采用上述权利要求1-6任一项所述的监测或减少运转中旋转体多个托轮在水平面歪倾的系统,该方法包括如下步骤:以不改变挡轮液压系统结构的方式,在旋转体的挡轮液压系统油路中安装1个压力传感器,该压力传感器把所测压力信号通过无线或有线方式发给一个计算机系统;以不改变旋转体结构的方式,把1个测距传感器平行于旋转体轴线安装到旋转体某一个固定结构件的端平面附近,该测距传感器把所测旋转体轴向位移的位置通过无线或有线方式发给所述计算机系统;所述某一个固定结构件为某旋转体上套设的大齿圈或挡轮;以不改变托轮结构的方式,把测量传感器分别安装到旋转体的每一个托轮外壳上、或每一个托轮的轴体旁、或每一个托轮的轮幅结构旁;每一个所述测量传感器各自通过无线或有线方式与所述计算机系统连接,用于测量旋转体的每个托轮各自承受的旋转体的轴向推力载荷对应的特性信号;当该测量传感器采用位移传感器时,所述特性信号用于表征该托轮轴中点与其轴向力“中性点”的差值的函数信号,当该托轮轴中点>轴向力“中性点”的轴向位置时,表示运转中托轮给轮带及旋转体向低端轴推力,托轮自身处在高端位置,需要被调整而向低端移动;当该测量传感器采用倾斜传感器时,则所述特性信号用于表征该托轮轴“中性零角度方位”与其轴向倾斜角度变化的函数信号,当旋转体对该托轮产生轴向推力时,用该倾斜传感器测量该托轮轴所承受轴向力倾斜角度的差值及方向;该轴向倾斜角度差值的绝对值与旋转体在该托轮上产生的轴向力载荷成正比;该倾斜角度的正负号用于判断每一个托轮对旋转体推力的方向;当倾斜传感器测出该倾斜角度朝向托轮低端方向,则表示旋转体把该托轮推向低端移动,该倾斜角度的方向即为正。8.一种减少运转中旋转体多个托轮在水平面歪倾的方法,其特征在于采用上述权利要求1-6任一项所述的监测或减少运转中旋转体多个托轮在水平面歪倾的系统,该方法包括如下步骤:以不改变挡轮液压系统结构的方式,在旋转体的挡轮液压系统油路中安装1个压力传感器,该压力传感器把所测压力信号通过无线或有线方式发给一个计算机系统;以不改变旋转体结构的方式,把1个测距传感器平行于旋转体轴线安装到旋转体某一个固定结构件的端平面附近,该测距传感器把所测旋转体轴向位移的位置通过无线或有线方式发给所述计算机系统;所述某一个固定结构件为某旋转体上套设的大齿圈或挡轮;以不改变托轮结构的方式,把测量传感器分别安装到旋转体的每一个托轮外壳上、或
每一个托轮的轴体旁、或每一个托轮的轮幅结构旁;每一个所述测量传感器各自通过无线或有线方式与所述计算机系统连接,用于测量旋转体的每个托轮各自承受的旋转体的轴向推力载荷对应的特性信号,当该测量传感器采用位移传感器时,则所述特性信号用于表征该托轮轴中点与其轴向力中性点的差值的函数信号,当轴向中点处在轴向力“中性点”的高端方向,表示运转中托轮给轮带及旋转体向低端的轴推力,托轮自身处在高端而需要调整托轮的水平面歪斜;所述低端与所述高端沿着旋转体轴线方向设置,所述水平面歪斜所在的水平面方向垂直于所述旋转体轴线方向;通过调整所有托轮在水平面歪斜的角度方位,使每个托轮的实时托轮轴中点均处于托轮“中性点”低端下坡方的合适范围内;当该测量传感器采用倾斜传感器时,则所述特性信号用于表征该托轮轴“理想中性零角度方位”与其轴向倾斜角度的变化的信号,当旋转体对该托轮产生轴向推力时,用该倾斜传感器测量该托轮轴所承受轴向力倾斜角度的差值及方向;该轴向倾斜角度差值的绝对值与旋转体在该托轮上产生的轴向力载荷成正比;该倾斜角度的正负号用于判断每一个托轮对旋转体推力的方向;当倾斜传感器测出该倾斜角度朝向托轮低端方向,则表示旋转体把该托轮推向低端移动,该倾斜角度的方向为正,即托轮轴向中点处于其“中性点”低端下坡方的合适范围内。9.根据权利要求8所述减少运转中旋转体多个托轮在水平面歪倾的方法,其特征在于还包括根据所述压力传感器发给所述计算机系统的压力值信号进行判断调整的步骤,当该压力值被控制在设定压力范围内,按照每个支撑轮带的顺序对每个托轮进行如下步骤的调整:(a)在第一轮带处,针对该轮带的一个托轮的至少一个轴承,调整该轴承在水平面歪斜的方向,直到使该托轮轴向中点被移动到其轴向力“中性点”的低端合适范围内;在第一轮带处,针对该轮带的另一个托轮的至少一个轴承,调整该轴承水平面歪斜的方向,直到使该托轮轴向中点被移动到其轴向力“中性点”的低端合适范围内;(b)重复上述步骤(a),按照第二轮带、第三轮带的轮带序号,顺序地针对各轮带的托轮分别进行操作,直到完成各轮带处所有托轮的至少一个轴承在水平面歪斜的方向调整;且所有托轮的轴向中点均被移动到其轴向力“中性点”位置的低端合适范围内,即旋转中所有托轮都给旋转体向高端方向一定的轴向推力。10.根据权利要求8所述减少运转中旋转体多个托轮在水平面歪倾的方法,其特征在于通过调整托轮某一侧的高端螺栓或低端螺栓,调整或减少该侧托轮在高端或低端的水平面歪斜。
技术总结
本发明公开了一种监测和减少旋转体托轮在水平面歪斜的方法及系统,在旋转体的挡轮液压系统油路中安装1个压力传感器;把1个测距传感器平行于旋转体轴线安装到旋转体某一个固定结构件的端平面附近,该测距传感器把所测旋转体轴向位移的位置发给计算机系统;把测量传感器分别安装到旋转体的每一个托轮外壳上、或每一个托轮的轴体旁、或每一个托轮的轮幅结构旁;每一个所述测量传感器各自用于监测每一个托轮各自承受的由旋转体轴向力特载荷所产生的特性信号,以监测需要调整托轮的水平面歪斜。只需旋转体设备向一个方向旋转既可以实现托轮在水平面的精确校准,明显减少和消除托轮轴向力超载引起托轮轴瓦烧瓦停窑事故,适用任何类型回转窑设备。何类型回转窑设备。何类型回转窑设备。
技术研发人员:张云 张晰
受保护的技术使用者:武汉理工大学
技术研发日:2022.08.25
技术公布日:2022/12/16
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。