用于高分辨率深度映射的具有经改进扫描速度的激光雷达系统
1.分案申请的相关信息
2.本技术是申请号为201680071399.x、申请日为2016年11月3日、发明名称为“用于高分辨率深度映射的具有经改进扫描速度的激光雷达系统”的中国发明专利申请的分案申请。
3.以引用方式并入任何优先权申请案中
4.举例来说,本技术案主张2015年11月5日提出申请且标题为“用于高分辨率深度映射的具有经改进扫描速度的激光雷达系统(lidar system with improved scanning speed for high-resolution depth mapping)”的美国临时专利申请案第62/251,672号的优先权,所述美国临时专利申请案的全文据此以引用的方式并入本文中。
技术领域
5.本发明涉及用于形成能视野(field of regard)的深度图的扫描激光雷达系统。
背景技术:
6.激光雷达是一种可用于测量距远程目标的距离的技术。通常,激光雷达系统包含光源及检测器。光源朝向目标发射光脉冲,所述目标接着使光散射。经散射光中的一些经散射光在检测器处被往回接收。系统基于与经返回光脉冲相关联的一或多个特性而确定距目标的距离。举例来说,系统可基于经返回光脉冲的飞行时间而确定距目标的距离。
技术实现要素:
7.在一些实施例中,一种激光雷达系统包括:光源,其经配置以发射光脉冲;扫描仪,其经配置以:使所述光源的视野跨越从所述激光雷达系统顺发射方向地定位的多个像素而在正向扫描方向上进行扫描,其中所述多个像素包括第一像素及第二像素,其中所述第二像素沿着所述正向扫描方向邻近于所述第一像素而定位;朝向所述第二像素引导所述光脉冲;及使所述激光雷达系统的第一检测器的视野进行扫描,其中:使所述第一检测器视野跨越所述多个像素而在所述正向扫描方向上进行扫描;且所述第一检测器视野在与所述正向扫描方向相反的方向上从所述光源视野偏移,其中,当发射所述脉冲时:所述第一检测器视野与所述第一像素至少部分地重叠;且所述光源视野与所述第二像素至少部分地重叠;及所述第一检测器,其中所述第一检测器经配置以检测所述光脉冲的由至少部分地位于所述第二像素内的目标散射的一部分。
8.在一些实施例中,一种方法包括:由激光雷达系统的光源发射光脉冲;使所述光源的视野跨越从所述激光雷达系统顺发射方向地定位的多个像素而在正向扫描方向上进行扫描,其中所述多个像素包括第一像素及第二像素,其中所述第二像素沿着所述正向扫描方向邻近于所述第一像素而定位;朝向所述第二像素引导所述光脉冲;使所述激光雷达系统的第一检测器的视野进行扫描,其中:使所述第一检测器视野跨越所述多个像素而在所
述正向扫描方向上进行扫描;且所述第一检测器视野在与所述正向扫描方向相反的方向上从所述光源视野偏移,其中当发射所述脉冲时:所述第一检测器视野与所述第一像素至少部分地重叠;且所述光源视野与所述第二像素至少部分地重叠;及检测所述光脉冲的由至少部分地位于所述第二像素内的目标散射的一部分。
附图说明
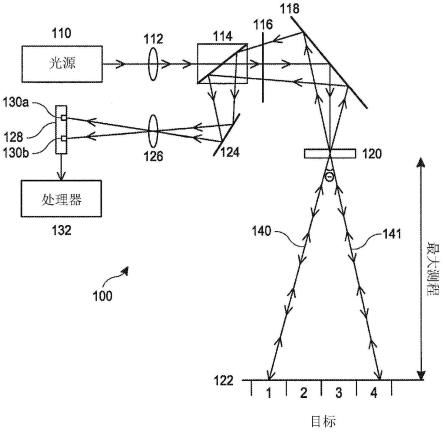
9.图1图解说明能够改进高分辨率深度映射的扫描速度的激光雷达系统100。
10.图2图解说明在对应于像素#1中的近测程目标的扫描时间处的顺发射方向像素与第一检测器130a的视野之间的空间关系。
11.图3图解说明在对应于像素#1中的中测程目标的扫描时间处的顺发射方向像素与第一检测器130a的视野之间的空间关系。
12.图4图解说明在对应于像素#1中的最大测程目标的扫描时间处的顺发射方向像素与第一检测器130a的视野之间的空间关系。
13.图5图解说明在对应于像素#1中的2倍最大测程目标的扫描时间处的顺发射方向像素与第一检测器130a的视野之间的空间关系。
14.图6是展示在各种测距周期期间一起检测哪些像素的图式。
15.图7是展示随时间在每一扫描排中检测哪些像素的图式。
16.图8是包含检测器130a到f的检测器阵列128的图式,所述检测器在两个维度上间隔开以用于同时扫描能视野中的多个行。
17.图9图解说明顺发射方向像素与检测器的视野之间的空间关系,其中检测器视野大于像素。
18.图10是包含两个检测器的检测器阵列的图式。
19.图11图解说明基于图10中的检测器阵列的正向及反向扫描。
20.图12是包含三个检测器的检测器阵列的图式。
21.图13图解说明基于图12中的检测器阵列的正向及反向扫描。
22.图14图解说明用于检测由目标散射的光的实例性方法。
23.图15图解说明用于检测来自角度上分离的光脉冲的经散射光的实例性方法。
具体实施方式
24.激光雷达系统可用于确定距顺发射方向目标的距离。通过使激光雷达系统跨越能视野进行扫描,所述系统可用于将距离映射到能视野内的若干个点。这些点中的每一者可称为像素。通常期望能视野内的经深度映射点尽可能紧密地间隔以便实现能视野的高分辨率深度图。另外,通常期望形成深度图所需的扫描时间为尽可能短的。举例来说,可期望以足够快以支持深度图视频(例如,30帧/秒)的帧速率重复地完成能视野的深度图。本发明描述能够以视频帧速率实现相对高分辨率深度图的激光雷达系统100。
25.图1图解说明能够改进高分辨率深度映射的扫描速度的激光雷达系统100。激光雷达系统100包含光源110。举例来说,光源可为脉冲激光。光源110发射朝向准直透镜112传播的光脉冲。在通过准直透镜112之后,光脉冲朝向四分之一波板116直接透射穿过分束器114。光脉冲接着从扫描仪118反射。举例来说,扫描仪118可为围绕至少一个轴线进行旋转
以便跨越能视野而引导光脉冲的扫描镜118。作为实例,扫描仪118可包含电流计扫描仪、共振扫描仪、音圈电机、dc电机、步进电机或微机电系统(mems)装置。在一些实施例中,替代分束器114及四分之一波板116,激光雷达系统100可包含镜,所述镜经配置使得由光源110发射的光脉冲通过所述镜。作为实例,镜可包含光脉冲在其行进到扫描镜118时所通过的孔、狭槽或其它孔口。由目标122散射的光可朝向激光雷达系统往回传播,且镜可朝向镜124反射此返回光,镜124接着朝向检测器透镜126引导所述光。还可使用其它物理布局及光学元件组合。
26.在从扫描仪118反射之后,光脉冲入射于全息元件、像素绘图器(pixelator)、衍射元件或类似装置120上。全息元件或像素绘图器120将光脉冲分裂成两个脉冲,所述两个脉冲现在沿着单独的角度上分离的路径140、141行进。两个光脉冲从激光雷达系统100朝向目标122顺发射方向地传播。在图1中,将目标122图解说明为位于激光雷达系统100的最大测程处。
27.在一些实施例中,由全息元件或像素绘图器120赋予的角度分离θ使得处于激光雷达系统的最大测程处的两个光脉冲之间的距离对应于多个像素的宽度。举例来说,全息元件或像素绘图器可经设计使得处于最大测程处的两个光脉冲之间的分离对应于大于或等于三个像素(例如,3个、5个、7个、9个等)的奇数个像素。(下文描述此特定间隔的重要性。)在图1中,在目标122上标记四个像素。将光脉冲中的一者引导到第一像素,而将另一光脉冲引导到第四像素。因此,在此实施例中,光脉冲之间的间隔为三个像素。
28.光脉冲从目标122散射且每一脉冲的一部分沿着往复路径140、141朝向激光雷达系统往回传播。每一返回光脉冲由扫描仪118(其在脉冲被透射时已从其位置稍微旋转)朝向四分之一波板116反射。在通过四分之一波板116之后,返回光脉冲由分束器114朝向镜124反射。(虽然图1图解说明光源110及检测器阵列128经由分束器114而共享孔口,但不具有共享孔口的其它实施例为可能的。)镜124将返回光脉冲朝向检测器透镜126反射,检测器透镜126将返回光脉冲聚焦于位于透镜126的焦平面处的检测器阵列128上。如本文中进一步所论述,检测器焦平面阵列128包含至少两个空间上分离的检测器130a、130b。两个检测器130a、130b之间的分离处于激光雷达系统100的扫描维度上。如图1中所展示,来自像素#1的返回光脉冲聚焦于第一检测器130a上,而来自像素#4的返回光脉冲聚焦于第二检测器130b上。因此,两个检测器130a、130b之间的分离对应于处于激光雷达系统100的最大测程处的光脉冲之间的间隔。因此,检测器130a、130b之间的分离同样对应于大于或等于三个的奇数个像素之间的间隔。(再次,下文论述此间隔的重要性。)
29.检测器130a、130b形成指示返回光脉冲的电信号。电信号被馈送到处理器132,所述处理器接着基于(举例来说)光脉冲的飞行时间而确定距目标122的距离。随着扫描仪118横穿能视野而重复此过程以便形成场景的深度图。处理器132还可用于控制来自光源110的光脉冲的时序及激光雷达系统100的其它功能。
30.图2图解说明在对应于像素#1中的近测程目标的扫描时间处的顺发射方向像素与第一检测器130a的视野之间的空间关系。像素的大小取决于光源110的角度视野的大小及距顺发射方向目标122的距离。在一些实施例中,光源110具有大约毫弧度的角度视野,但所述角度视野可取决于应用而为更大或更小的。在一些实施例中,每一检测器130a、130b的角度视野大体上等于光源110的角度视野,但此并非必需的。然而如图2中所图解说明,像素与
检测器视野具有相同大小。
31.激光雷达系统100经设计使得每一检测器130a、130b与顺发射方向像素对准,所述每一检测器分别从光源110与其对准的顺发射方向像素中的一者偏移(光源110由于像素绘图器120而同时与两个顺发射方向像素对准)。举例来说,在一些实施例中,检测器130a、130b瞄准于两个像素处,所述两个像素直接邻近(在与扫描方向相反的方向上)于光源与其对准的相应顺发射方向像素。
32.参考图2,光源110在时间t1处发射光脉冲,此时扫描仪118经定位以便朝向像素#1引导第一脉冲(且朝向像素#4引导第二脉冲)。在光脉冲被发射(且随后被分裂成两个脉冲)之后,扫描仪118继续扫描(从左到右)到下一像素。由于第一检测器130a的视野在与扫描方向相反的方向上从光源的视野偏移,因此第一检测器130a的视野直到t1之后的后续时间才与像素#1对准。
33.在图2中,自光脉冲被发射以来,已度过相对短的时间周期。因此,检测器130a的视野与像素#1稍微重叠。如果返回脉冲由检测器130a在图2中所图解说明的时间处接收,那么由于短的逝去飞行时间,因此处理器132将登记对近测程目标122的检测。虽然在近测程目标的情形中,检测器视野仅与像素#1部分地重叠,但返回脉冲仍为足够强的以被检测到,这是因为1/r^2信号损失由于所述目标的相对近测程而为较小的。
34.图3图解说明在对应于像素#1中的中测程目标的扫描时间处的顺发射方向像素与第一检测器130a的视野之间的空间关系。在此扫描时间处,检测器130a的视野与像素#1重叠达比图2中的短测程目标的情形大的量。这是归因于自t1以来的较长逝去扫描时间。由于检测器130a的视野与像素#1之间的较大重叠,因此由较遥远目标导致的较大1/r^2信号损失至少部分地偏移。检测器130a因此能够检测来自中测程目标的返回脉冲。
35.图4图解说明在对应于像素#1中的最大测程目标的扫描时间处的顺发射方向像素与第一检测器130a的视野之间的空间关系。如图4所图解说明,扫描仪118的扫描速度可经设定使得在与针对位于激光雷达系统100的最大测程处的目标122的往返时间对应的扫描时间处,第一检测器130a的视野与像素#1大体上完全重叠。(换句话说,在所图解说明实例的情形中,使扫描仪移动一个像素的宽度所需的时间与针对系统100的最大测程的往返时间大约相同;用以从一侧到另一侧完全横穿一个像素的时间为针对最大测程的往返时间的2倍。)针对最大测程目标而使检测器的视野与像素#1大体上完全重叠以便使由与激光雷达系统的最大测程相关联的往返传播距离导致的较大1/r^2信号损失至少部分地偏移为有利的。
36.图4与图2的比较显示,在对应于像素#1的最大测程目标的扫描时间处,当像素#1的扫描开始时,检测器视野相对于像素#2所处的位置与其相对于像素#1所处的位置相同。此可表明检测器可在此时间处开始扫描像素#2。然而,进行此的问题是位于像素#1中的恰好超出激光雷达系统100的最大测程的目标可被混淆为位于像素#2中的短测程目标。用以避免此模糊的一种方式将为暂停或减小扫描仪118的扫描速度。用以避免所述模糊的另一方式将为降低扫描分辨率。然而,这些解决方案均非特别合意的。图1中所图解说明的激光雷达系统100使用较好的解决方案。
37.如图1中所展示,检测器阵列128包含两个空间上分离的检测器130a、130b。并且如已论述,两个检测器130a、130b在扫描方向上彼此偏移达对应于大于或等于三个的奇数个
像素的距离。具体来说,在图1中,检测器彼此偏移达对应于三个像素的距离。因此,当第一检测器130a与像素#1对准时,第二检测器130b与像素#4对准。此外,由于全息元件或像素绘图器120的存在,因此当朝向像素#1发射光脉冲时,也朝向像素#4发射另一光脉冲。此意味着可由两个检测器130a、130b同时检测像素#1及像素#4。
38.如刚刚关于图4所论述,当扫描仪118处于使第一检测器130a开始扫描像素#2的位置中时,存在与开始扫描像素#2相关联的缺点。出于相同原因,当扫描仪处于使第二检测器130b开始扫描像素#5的位置中时,还存在与开始扫描像素#5相关联的缺点。这是因为将位于像素#1及#4中的超出系统的最大测程的遥远目标分别错误识别为位于像素#2及#5中的短测程目标的风险。可通过以下操作而减轻此风险:在此时间处跳过像素#2及像素#5(即,在此时间处不朝向这些像素发射激光脉冲)且替代地等待直到扫描仪118处于使第一检测器130a扫描像素#3及使第二检测器130b扫描像素#6的位置中为止。此在图5中进行图解说明。
39.图5图解说明在对应于像素#1中的2倍最大测程目标的扫描时间处的顺发射方向像素与第一检测器130a的视野之间的空间关系。在此扫描位置处,存在错误地检测像素#1中的目标的经减弱风险,这是因为此目标将位于系统的最大测程的两倍处且返回光脉冲将引发与所述距离相关联的相对大量的1/r^2损失。与任何此返回相关联的信号将可能不会上升到高于系统的噪声本底(noise floor)。(然而,如果即使像素中的目标在系统的最大测程的2倍的距离处,错误识别所述目标的测程的风险仍被认为太大,那么可替代地使第一检测器130a与第二检测器130b分离达对应于5个、7个、9个等像素的距离。)在图5中所图解说明的扫描位置处,第一检测器130a处于将开始扫描像素#3的位置中。尽管未图解说明,但第二检测器130b将类似地处于将开始扫描像素#6的位置中。因此,处理器132可致使光源110在扫描仪位置处发射光脉冲。如本文中已论述,光脉冲由全息元件或像素绘图器120划分以便致使脉冲在相同时间处朝向像素#3及像素#6两者被发送。随着扫描仪118跨越能视野继续前进,这些像素接着由检测器130a、130b进行测距(以与图2到4中所图解说明相同的方式)。
40.图6是展示在各种测距周期期间一起检测哪些像素的图式。在图6中用星形物来指示在特定测距周期中被检测的像素,而划掉或未展示在所述测距周期期间未检测的像素。如本文中已论述,在一些实施例中,第一检测器130a及第二检测器130b为空间上分离的,使得其处于将对在扫描方向上由三个像素间隔开的像素同时进行测距/检测的位置中。因此,在第一测距周期期间,检测像素#1及像素#4。在第二测距周期期间,检测像素#3及像素#6。在第三测距周期期间,检测像素#5及像素#8,以此类推。以此方式,第一检测器130a检测奇数像素,而第二检测器130b检测偶数像素。
41.图7是展示随时间在每一扫描排中检测哪些像素的图式。如图式中所展示,检测扫描排中的每个像素,只有像素#2除外。在许多应用中,此折衷将为可接受的,以便实现较高扫描速度及经增加分辨率。然而,如果有必要扫描所述排中的每个像素,那么扫描仪118可经配置以扫描所述排的尾端处的一或多个额外像素以便进行补偿。
42.图8是包含检测器130a到f的检测器阵列128的图式,所述检测器在两个维度上间隔开以用于同时扫描能视野中的多个行。检测器阵列128中的每一行检测器可在相同时间处扫描能视野中的一排。如所图解说明,检测器130a及130b可以本文中已论述的方式扫描
排#1。同时,检测器130c及130d可扫描排#5且检测器130e及130f可扫描排#9。通过在垂直轴线中将检测器间隔开,扫描仪可简单地使方向反向且使视线向下移动一排以实现扫描。否则,扫描将被延迟到在起始下一(些)扫描排之前扫描的垂直部分横穿若干个检测器排之后的时间。然而,在垂直于扫描方向的方向上的检测器之间的其它布置及间隔也是可能的。
43.在一些实施例中,激光雷达系统100可包含光源110、扫描仪118及检测器(例如,检测器130a)。扫描仪118可经配置以使光源110的视野跨越从激光雷达系统顺发射方向地定位的多个像素(例如,图1到5中所图解说明的像素#1到像素#3或图6到7中所图解说明的像素#1到像素#8)而在扫描方向上进行扫描。像素可包含像素#1及像素#2,其中像素#2沿着扫描方向邻近于像素#1而定位。像素#2沿着扫描方向邻近于像素#1而定位可指示光源视野在跨越像素#2进行扫描之前开始跨越像素#1进行扫描(即,像素#1在像素#2之前被扫描)。作为实例,如果扫描方向是从左到右(例如,如图2到5中所指示),那么像素#2位于像素#1右侧。图2到5中所指示的扫描方向(例如,从左到右)可称为正向扫描方向,且大体上与正向扫描方向相反的方向(例如,从右到左)可称为反向扫描方向。
44.在一些实施例中,像素可表示或可对应于光源110的视野。随着光源束远离光源110传播,所述束的直径(以及对应像素的大小)可根据束发散度而增加。作为实例,如果光源110具有1毫弧度(mrad)的发散度,那么在距光源110的100m距离处,光源束可具有大约10cm的大小或直径,且对应像素还可具有大约10cm的对应大小或直径。在距光源110的200m距离处,光源束及对应像素可各自具有大约20cm的直径。
45.在一些实施例中,光源110可在时间t1处发射光脉冲,且扫描仪118可朝向像素#2引导光脉冲(例如,当发射脉冲时,光源视野可与像素#2部分地、大体上或完全重叠)。扫描仪118还可经配置以使检测器130a的视野在与扫描光源视野相同的扫描方向上跨越像素而进行扫描。在一些实施例中,检测器130a视野可在与扫描方向相反的方向上从光源视野偏移(例如,检测器130a的视野落后于光源视野)。检测器与光源视野之间的偏移可使得在发射脉冲时的时间t1处,检测器130a的视野与像素#1至少部分地重叠,且光源视野与像素#2至少部分地重叠(例如,检测器130a的视野落后于光源视野达大约一个像素)。作为实例,在时间t1处,检测器130a的视野可与像素#1的大体上全部(例如,大于或等于80%)重叠(例如,如图4中所图解说明),且光源视野可与像素#2的大体上全部(例如,大于或等于80%)重叠。另外,在时间t1处,检测器130a的视野可与像素#2的小于10%重叠,且光源视野可与像素#1的小于10%重叠。检测器视野可相对于光源视野为任何适合大小。作为实例,检测器视野的角度大小可小于光源视野的角度大小、与所述光源视野的角度大小大体上相同或大于所述光源视野的角度大小。
46.在一些实施例中,检测器130a可经配置以检测光脉冲的由至少部分地位于像素#2内的目标散射的一部分。可在发射脉冲时的t1之后的任何适合时间处检测光脉冲的所述部分(例如,检测器130a可在时间t2处检测脉冲的所述部分,其中t2》t1)。在一些实施例中,激光雷达系统100可包含处理器132,所述处理器至少部分地基于光脉冲的飞行时间而确定从激光雷达系统100到目标的距离,其中所述飞行时间为(t
2-t1)。如果激光雷达系统100测量飞行时间δt(例如,δt(其等于t
2-t1)表示光从激光雷达系统100行进到目标并返回到激光雷达系统100的往返时间),那么从目标到激光雷达系统100的距离d可表达为d=c
·
δt/2,其中c为光速度(大约3.0
×
108m/s)。作为实例,如果飞行时间测量为δt=300ns,那么从目
标122到激光雷达系统100的距离为大约d=45.0m。
47.如果从激光雷达系统100到目标122的距离对应于激光雷达系统100的最大测程,那么对应于激光雷达系统的最大测程的往返时间为大约(t
2-t1),且在时间t2处(当检测器检测所发射脉冲的经散射部分时),检测器130a的视野与像素#2的大体上全部(例如,大于或等于80%)重叠。激光雷达系统100的最大测程可为任何适合距离,例如,100m、200m、500m或1km。作为实例,如果最大测程为200m,那么对应于最大测程的飞行时间为大约在一些实施例中,如果目标为位于激光雷达系统100的最大测程的20%以内的近测程目标,那么在时间t2处(当检测器检测所发射脉冲的经散射部分时),检测器视野可与像素#2的小于或等于20%重叠。在一些实施例中,如果目标为位于激光雷达系统100的最大测程的20%到80%之间的中测程目标,那么在时间t2处,检测器视野可与像素#2的20%到80%重叠。在一些实施例中,如果目标位于激光雷达系统100的最大测程的大于或等于80%的距离处,那么在时间t2处,检测器视野可与像素#2的大于或等于80%重叠。
48.在一些实施例中,检测器130a的视野与光源视野可具有大约相同扫描速度。作为实例,检测器视野及光源视野可各自在大约等于与激光雷达系统100的最大测程对应的往返时间的时间内扫描一个像素的宽度。在一些实施例中,检测器视野在与扫描方向相反的方向上从光源视野偏移可导致检测器视野在时间t3处与像素#2对准,其中t3大于t1、t3大于或等于t2且(t
3-t1)对应于针对激光雷达系统100的最大测程的往返时间。作为实例,光源可在时间t1处朝向像素#2发射光脉冲,且可在后续时间t2处接收来自像素#2的对应返回信号。检测器视野可在时间t3处与像素#2对准,其中时间t3发生在时间t1之后(例如,时间t3》t1),且时间(t
3-t1)对应于针对激光雷达系统100的最大测程的往返时间。如果来自像素#2的返回信号包含来自位于最大测程处的目标的经散射光,那么t3可为大约等于t2(例如,在与检测器视野对准于像素#2的时间大约相同的时间处接收光)。否则,如果来自像素#2的返回信号源自位于比最大测程近的目标,那么t3大于t2(例如,在检测器视野于时间t3处与像素#2大体上对准之前在时间t2处接收光)。
49.在一些实施例中,在于时间t1处发射光脉冲之后,光源110可经配置以在时间t4处发射另一光脉冲。可在检测器视野与像素#2对准时的时间处或在后续时间处发射后续光脉冲。检测器视野可在时间t3处与像素#2对准,其中(t
3-t1)对应于针对激光雷达系统100的最大测程的往返时间,且光源110可在时间t4处发射后续光脉冲,其中t4大于或等于t3。另外,像素可包含沿着扫描方向邻近于像素#2而定位的像素#3,且在发射脉冲时的时间t4处,光源110的视野可经对准以朝向像素#3引导脉冲。
50.图9图解说明顺发射方向像素与检测器的视野之间的空间关系,其中检测器视野(fov)大于像素。在一些实施例中,检测器视野的角度大小可大于光源视野的角度大小。作为实例,检测器视野可比像素(其对应于光源110的视野)的大小大1.5倍、2倍、3倍、4倍、5倍或10倍。在图9中,检测器fov比像素#1大大约2.5倍(例如,检测器fov的直径是像素#1的直径的大约2.5倍)。作为另一实例,检测器fov的发散度可比光源fov的发散度大大约1.5倍、2倍、3倍、4倍、5倍或10倍。如果检测器fov具有3-mrad发散度且光源fov具有1-mrad发散度,那么在距光源110的任何特定距离处,检测器fov比光源fov大3倍。举例来说,在距光源110的100m距离处,光源束(其对应于像素#1)可具有大约10cm的直径,且检测器fov可具有大约
30cm的直径。在200m距离处,光源束可具有大约20cm的直径,且检测器fov可具有大约60cm的直径。
51.在一些实施例中,激光雷达系统100可执行一系列正向及反向扫描。作为实例,正向扫描可包含使检测器fov从左到右水平地进行扫描,且反向扫描可包含使检测器从右到左进行扫描,或反之亦然。作为另一实例,正向扫描可包含使检测器fov垂直地进行扫描(例如,向上或向下扫描),且反向扫描可包含使检测器fov在相反方向上进行扫描。作为另一实例,正向扫描可包含使检测器fov沿着任何适合方向(例如,沿着45度角)开始进行扫描,且反向扫描可包含使检测器fov沿着大体上相反方向进行扫描。
52.如图9中所图解说明,可在正向扫描期间使检测器fov沿着从左到右方向进行扫描,且可在反向扫描期间使检测器fov沿着从右到左方向进行扫描。在一些实施例中,正向及反向扫描可跟踪彼此邻近或相对于彼此位移的路径。作为实例,反向扫描可沿循能视野中的位移于前一正向扫描的上方、下方、左侧或右侧的排。作为另一实例,反向扫描可扫描能视野中的位移于前一正向扫描的下方的行,且下一正向扫描可位移于所述反向扫描的下方。正向及反向扫描可以交替方式继续,其中每一扫描相对于前一扫描进行位移直到已覆盖完整能视野为止。扫描可相对于彼此进行位移达任何适合角度量,例如,达大约0.05
°
、0.1
°
、0.2
°
、0.5
°
、1
°
或2
°
。
53.在一些实施例中,激光雷达系统100可经配置使得检测器fov大于光源fov,且检测器与光源fov大体上重合或重叠。光源110可朝向像素#1发射光脉冲(例如,当发射脉冲时,光源fov可与像素#1部分地、大体上或完全重叠)。检测器的fov可大于光源fov,且当朝向像素#1发射光脉冲时,检测器fov可含纳像素#1且可大约以像素#1为中心。如图9中所图解说明,检测器fov可不具有相对于光源fov的任何实质偏移,且当光脉冲传播到目标及从目标传播时,检测器fov在正向扫描期间扫描到右侧且在反向扫描期间扫描到左侧。像素#1及检测器fov的大小可经配置使得在正向或反向扫描期间,检测器fov可至少在对应于激光雷达系统的最大测程的往返时间逝去之前大体上含纳像素#1。当对应于激光雷达系统的最大测程的往返时间已逝去时,检测器fov可已移动使得像素#1位于检测器fov的左侧或右侧边缘处或其附近。举例来说,在正向扫描期间,在对应于所述最大测程的往返时间已逝去之后,像素#1的左边缘可与检测器fov的左边缘大体上重合。
54.图10是包含两个检测器130g、130h的检测器阵列128的图式。在一些实施例中,激光雷达系统100可包含具有第一检测器130g及第二检测器130h的检测器阵列128。作为实例,检测器130g及130h中的每一者可为雪崩光电二极管(apd)或单光子雪崩二极管(spad)。作为另一实例,检测器130g及130h中的每一者可为pn光电二极管(例如,由p型半导体及n型半导体形成的光电二极管结构)或pin光电二极管(例如,由位于p型区域与n型区域之间的未经掺杂固有半导体区域形成的光电二极管结构)。检测器130g、130h可各自具有包含硅、锗或ingaas的作用区域或雪崩倍增区域。作用区域或雪崩倍增区域可具有任何适合大小,例如,大约50μm到500μm的直径或宽度。
55.图11图解说明基于图10中的检测器阵列的正向及反向扫描。在一些实施例中,激光雷达系统100可包含光源110、扫描仪118及具有两个检测器130g、130h的检测器阵列128。两个检测器130g及130h可沿着对应于光源扫描方向的方向彼此偏移,且光源110的视野可位于检测器130g的fov与检测器130h的fov之间。扫描仪118可经配置以使光源fov(以及检
测器130g及130h的fov)跨越从激光雷达系统顺发射方向地定位的多个像素而在正向扫描方向上且在反向扫描方向上进行扫描。作为实例,扫描仪118可使光源fov(及检测器fov)沿着正向扫描方向进行扫描,且接着扫描仪118可使方向反向且沿着反向扫描方向进行后续扫描。如本文中所论述,正向及反向扫描可跟踪彼此邻近或相对于彼此位移的路径。可交替地执行正向及反向扫描,其中每一反向扫描相对于前一正向扫描进行位移,且每一正向扫描相对于前一反向扫描进行位移。作为实例,正向扫描可沿循大体上水平路径,且针对后续反向扫描,扫描仪118可使光源fov(以及检测器130g及130h的fov)垂直地偏转达某一角度(例如,0.5
°
)。
56.在图11中,正向扫描水平地从左到右跨越像素#1进行跟踪,且反向扫描跨越像素#2从右到左进行跟踪,所述像素#2位于像素#1下方。在一些实施例中,检测器130g的视野可在与正向扫描方向相反的方向(其对应于反向扫描方向)上从光源视野偏移,且检测器130h的视野可在正向扫描方向上从光源视野偏移。在图11中所图解说明的正向扫描中,检测器130h的fov领先于光源fov(对应于像素#1),且检测器130g的fov落后于光源fov。在反向扫描中,检测器的相对定向互换,使得检测器130g的fov领先于光源fov(对应于像素#2),且检测器130h的fov落后于光源fov。在一些实施例中,在正向扫描期间,激光雷达系统100可使用来自检测器130g的信号来确定距目标的距离,且在反向扫描期间,激光雷达系统100可使用来自检测器130h的信号来确定距目标的距离。在一些实施例中,可在正向扫描期间忽略由检测器130h产生的信号,且可在反向扫描期间忽略由检测器130g产生的信号。
57.在一些实施例中,在正向扫描期间,光源110可发射光脉冲,且扫描仪118可朝向像素#1引导光脉冲。当发射所述脉冲时,检测器130g及130h的fov可各自与像素#1的小于或等于20%重叠。扫描仪118可使检测器130g及130h的fov沿着正向扫描方向(例如,在图11中从左到右)进行扫描,且检测器130g可检测光脉冲的由从激光雷达系统100顺发射方向地定位的目标散射的一部分。随着时间进展,检测器130h fov与像素#1的重叠可降低直到不存在重叠为止,且检测器130g fov与像素#1的重叠可增加直到其达到最大重叠(例如,大于或等于80%重叠)为止。检测器130g fov与像素#1之间的最大重叠可发生在对应于激光雷达系统的最大测程的时间处,且在此之后,检测器130g fov与像素#1之间的重叠可随着正向扫描继续进行而降低。
58.在一些实施例中,在反向扫描期间,光源110可发射另一光脉冲,且扫描仪118可朝向像素#2引导光脉冲。当发射所述脉冲时,检测器130g及130h的fov可各自与像素#2的小于或等于20%重叠。扫描仪118可使检测器130g及130h的fov沿着反向扫描方向(例如,在图11中从右到左)进行扫描,且检测器130h可检测光脉冲的由从激光雷达系统100顺发射方向地定位的目标散射的一部分。随着时间进展,检测器130g fov与像素#2的重叠可降低直到不存在重叠为止,且检测器130h fov与像素#2的重叠可增加直到其达到最大重叠(例如,大于或等于80%重叠)为止。检测器130h fov与像素#2之间的最大重叠可发生在对应于激光雷达系统的最大测程的时间处,且在此之后,检测器130h fov与像素#2之间的重叠可随着反向扫描继续进行而降低。
59.在一些实施例中,检测器阵列128可包含两个检测器(例如,第一检测器及第二检测器),其中第一检测器用于在正向扫描期间检测经散射光,且第二检测器用于在反向扫描期间检测经散射光。激光雷达系统100可包含光学元件,所述光学元件经配置以在正向扫描
期间将经散射光引导到第一检测器且在反向扫描期间将经散射光引导到第二检测器。作为实例,扫描仪118可用于在正向扫描期间施加第一量的固定偏转或角度偏移,使得将来自所发射脉冲的经散射光引导到第一检测器。类似地,扫描仪118可在反向扫描期间施加第二量的偏转或角度偏移,使得将经散射光引导到第二检测器。作为另一实例,激光雷达系统100可包含额外偏转镜或偏转元件(例如,楔形光学器件),所述额外偏转镜或偏转元件具有用于分别在正向或反向扫描期间将经散射光引导到第一检测器或第二检测器的两个偏转状态。在一些实施例中,激光雷达系统可包含一个检测器,所述一个检测器经配置以在正向及反向扫描两者期间检测经散射光。激光雷达系统100可包含光学元件,所述光学元件提供检测器fov的两个定向状态。在正向扫描期间,检测器fov可经定向使得其落后于光源fov并检测来自所发射脉冲的经散射光,且在反向扫描期间,检测器fov可经定向使得其也落后于光源fov。
60.在一些实施例中,激光雷达系统100可包含光源110、分裂器120、扫描仪118及检测器阵列128。光源110可发射光脉冲,且分裂器120可将每一所发射光脉冲分裂成两个或两个以上角度上分离的光脉冲。可使所述脉冲分离达任何适合角度θ,例如,1mrad、2mrad、5mrad、10mrad、20mrad或50mrad。扫描仪118可使光脉冲跨越从激光雷达系统100顺发射方向地定位的像素而沿着扫描方向进行扫描,所述光脉冲由光源110发射且由分裂器120分裂。检测器阵列128可包含两个或两个以上检测器。作为实例,分裂器120可将所发射脉冲分裂成两个角度上分离的光脉冲(例如,第一脉冲及第二脉冲),且检测器阵列128可包含第一检测器130a及第二检测器130b。第一检测器与第二检测器可沿着对应于光脉冲的扫描方向的方向而分离达检测器分离距离。第一检测器可经配置以检测来自第一光脉冲的经散射光,且第二检测器可经配置以检测来自第二光脉冲的经散射光。在一些实施例中,激光雷达系统100还可包含处理器,所述处理器经配置以至少部分地基于第一光脉冲的飞行时间或第二光脉冲的飞行时间而确定距一或多个目标的一或多个距离。
61.在一些实施例中,分裂器120可包含全息光学元件、衍射光学元件、偏光分束器、非偏光分束器或者具有金属或电介质涂层的分束器。作为实例,分裂器120可包含使用全息过程来制造的分束器,或分裂器120可包含衍射分束器。作为另一实例,分裂器120可包含将输入束划分成两个或两个以上输出束的全息元件或衍射元件。在一些实施例中,分裂器120可定位于扫描仪118之后,使得分裂器120从扫描仪118接收所发射光脉冲。如图1中所图解说明,扫描仪118接收由光源110发射的光脉冲,且分裂器120定位于扫描仪118之后以从扫描仪118接收脉冲。在一些实施例中,扫描仪118可定位于分裂器120之后,使得分裂器120接收由光源110发射的光脉冲,且扫描仪118在光脉冲由分裂器120分裂之后接收所述光脉冲。
62.在一些实施例中,分裂器120可经配置以将光脉冲大体上均等地分裂成两个脉冲。作为实例,分裂器120可接收一个光脉冲且将其分裂成第一脉冲及第二脉冲,其中第一脉冲及第二脉冲各自具有所接收光脉冲的能量或峰值功率的大约一半。在一些实施例中,分裂器120可经配置以将光脉冲分裂成三个角度上分离的光脉冲(例如,第一脉冲、第二脉冲及第三脉冲)。另外,检测器阵列可包含三个检测器(例如,第一检测器、第二检测器及第三检测器),其中每一检测器经配置以接收并检测来自相应光脉冲中的一者的光(例如,第一检测器检测来自第一脉冲的光)。在一些实施例中,可沿着对应于扫描方向的方向将来自分裂器120的角度上分离的光脉冲分裂。作为实例,如果扫描方向为大体上水平的,那么还可沿
着相同水平方向将角度上分离的光脉冲分裂。
63.在一些实施例中,光源110可在时间t1处发射光脉冲,且分裂器120可将所述脉冲分裂成两个脉冲(例如,第一脉冲及第二脉冲)。扫描仪118可使与第一脉冲相关联的第一光源视野及与第二脉冲相关联的第二光源视野沿着扫描方向且跨越从激光雷达系统100顺发射方向地定位的像素而进行扫描。所述像素可包含沿着扫描方向按次序定位的像素#1、像素#2、像素#3、像素#4及像素#5(例如,第一光源视野或第二光源视野可跨越所述像素进行扫描且按以下次序遇到所述像素:像素#1、像素#2、像素#3、像素#4及像素#5)。在一些实施例中,扫描仪118可朝向像素#2引导第一光脉冲且朝向像素#5引导第二光脉冲。另外,扫描仪118可使第一检测器的视野及第二检测器的视野跨越所述像素而沿着扫描方向进行扫描。第一检测器视野可在与扫描方向相反的方向上从第一光源视野偏移,其中在时间t1处,第一检测器视野与第一像素至少部分地重叠,且第一光源视野与第二像素至少部分地重叠。类似地,第二检测器视野可在与扫描方向相反的方向上从第二光源视野偏移,其中在时间t1处,第二检测器视野与第四像素至少部分地重叠,且第二光源视野与第五像素至少部分地重叠。
64.在一些实施例中,在激光雷达系统100的最大测程处的第一光脉冲与第二光脉冲之间的分离距离可对应于检测器130a与130b之间的分离距离。作为实例,当第一光脉冲及第二光脉冲入射于位于激光雷达系统100的最大测程处的目标上时,第一光脉冲与第二光脉冲可分离达对应于检测器分离距离的距离。当发射第一光脉冲及第二光脉冲时,所述第一光脉冲及第二光脉冲的视野可分别与像素#2及#5重叠。当第一光脉冲及第二光脉冲在从目标散射之后返回到激光雷达系统100时,第一检测器视野可与像素#2重叠,且第二检测器视野可与像素#5重叠。在一些实施例中,在激光雷达系统100的最大测程处的第一光脉冲与第二光脉冲之间的分离距离可对应于大于或等于三个像素的奇数个像素。作为实例,在最大测程处,第一光脉冲与第二光脉冲可分离达对应于三个像素的距离,使得当第一脉冲被引导于像素#2处时,第二脉冲被引导于像素#5处。在一些实施例中,检测器分离距离可对应于大于或等于三个像素的奇数个像素。作为实例,检测器分离距离可对应于三个像素,使得当第一检测器从像素#2接收光时,第二检测器从像素#5接收光。
65.图12是包含三个检测器130i、130j及130k的检测器阵列128的图式。检测器130i、130j及130k中的每一者可为apd或spad。在一些实施例中,激光雷达系统100可包含光源110、扫描仪118、分裂器120以及具有三个检测器130i、130j及130k的检测器阵列128。三个检测器130i、130j、130k可沿着对应于光源扫描方向的方向而彼此分离达检测器分离距离。
66.图13图解说明基于图12中的检测器阵列的正向及反向扫描。在正向扫描期间,分裂器120可将所发射脉冲分裂成两个角度上分离的光脉冲(例如,分别被引导到像素#1及像素#2的第一脉冲及第二脉冲)。当发射所述脉冲时,第一脉冲的视野(对应于像素#1)可位于检测器130i的fov与检测器130j的fov之间,且第二脉冲的视野(对应于像素#2)可位于检测器130j的fov与检测器130k的fov之间。检测器130i fov可落后于第一脉冲的fov,且检测器130i可经配置以检测来自第一脉冲的经散射光。类似地,检测器130j fov可落后于第二脉冲的fov,且检测器130j可经配置以检测来自第二脉冲的经散射光。另外,在正向扫描期间,可忽略来自检测器130k的信号。在一些实施例中,可存在位于像素#1与像素#2之间的额外像素(图13中未图解说明)(及位于像素#3与像素#4之间的额外像素)。
67.在一些实施例中,扫描仪118可经配置以使额外光脉冲沿着对应于与正向扫描方向相反的方向的反向扫描方向进行扫描,所述额外光脉冲由光源110发射且由分裂器120分裂。在扫描仪118于反向扫描方向上进行扫描的同时,光源110可发射额外光脉冲。如本文中所论述,反向扫描方向的扫描可相对于正向扫描方向进行位移。在图13中,正向扫描跨越像素#1及像素#2进行跟踪,且反向扫描跨越像素#3及像素#4进行跟踪,所述像素#3及像素#4位于像素#1及像素#2下方。分裂器120可将所发射脉冲分裂成角度上分离的第三光脉冲及第四光脉冲。第三脉冲可被引导到像素#3,且第四脉冲可被引导到像素#4。当发射所述脉冲时,第三脉冲的视野(对应于像素#3)可位于检测器130j的fov与检测器130k的fov之间,且第二脉冲的视野(对应于像素#4)可位于检测器130i的fov与检测器130j的fov之间。在反向扫描期间,检测器130k fov可落后于第三脉冲的fov,且检测器130k可经配置以检测来自第三脉冲的经散射光。类似地,检测器130j fov可落后于第四脉冲的fov,且检测器130j可经配置以检测来自第四脉冲的经散射光。另外,在反向扫描期间,可忽略来自检测器130i的信号。
68.如本文中所描述或图解说明的激光雷达系统100还可包含在2015年10月19日提出申请且标题为“在存在太阳背景噪声的情况下具有经改进信噪比的激光雷达系统(lidar system with improved signal-to-noise ratio in the presence of solar background noise)”的美国临时专利申请案第62/243633号或2015年11月30日提出申请且标题为“具有分散式激光及多个传感器头的激光雷达系统(lidar system with a distributed laser and a plurality of sensor heads)”的美国临时专利申请案第62/261214号中所描述或图解说明的各种元件,所述美国临时专利申请案中的每一者以引用的方式并入本文中。
69.图14图解说明用于检测由目标散射的光的实例性方法400。所述方法可在步骤410处开始,其中激光雷达系统100的光源110在时间t1处发射光脉冲。在步骤420处,可使光源110的视野跨越从激光雷达系统100顺发射方向地定位的多个像素而在正向扫描方向上进行扫描。所述像素可包含第一像素及第二像素,其中第二像素沿着正向扫描方向邻近于第一像素而定位。在步骤430处,可朝向第二像素引导光脉冲。在步骤440处,可使激光雷达系统100的第一检测器的视野进行扫描。可使第一检测器视野跨越所述像素而在正向扫描方向上进行扫描。另外,第一检测器视野可在与正向扫描方向相反的方向上从光源视野偏移,其中在时间t1处,第一检测器视野与第一像素至少部分地重叠,且光源视野与第二像素至少部分地重叠在步骤450处,可检测光脉冲的由至少部分地位于第二像素内的目标散射的一部分,此时所述方法可结束。可在时间t2处检测光脉冲的所述部分,其中t2大于t1。
70.图15图解说明用于检测来自角度上分离的光脉冲的经散射光的实例性方法500。所述方法可在步骤510处开始,其中激光雷达系统100的光源110发射光脉冲。在步骤520处,可将所发射光脉冲分裂成两个或两个以上角度上分离的光脉冲。所述两个或两个以上脉冲可由分裂器120分裂且可包含第一光脉冲及第二光脉冲。在步骤530处,可使光脉冲(其由光源110发射且由分裂器120分裂)跨越从激光雷达系统100顺发射方向地定位的像素而沿着扫描方向进行扫描。在步骤540处,可检测来自第一光脉冲的经散射光。在步骤550处,可检测来自第二光脉冲的经散射光,此时所述方法可结束。可分别由第一检测器及第二检测器检测来自第一光脉冲及第二光脉冲的经散射光,其中第一检测器及第二检测器为检测器阵
列的部分。第一检测器与第二检测器可沿着对应于光脉冲的扫描方向的方向而分离达检测器分离距离。
71.在以下段落中描述额外实例性实施例:
72.一种激光雷达系统,其包括:光源,其经配置以发射光脉冲;分裂器,其经配置以将所述所发射光脉冲分裂成包括第一光脉冲及第二光脉冲的两个或两个以上角度上分离的光脉冲;扫描仪,其经配置以使光脉冲跨越从所述激光雷达系统顺发射方向地定位的多个像素而沿着扫描方向进行扫描,所述光脉冲由所述光源发射且由所述分裂器分裂;及
73.检测器阵列,其包括第一检测器及第二检测器,其中:所述第一检测器与所述第二检测器沿着对应于所述光脉冲的所述扫描方向的方向而分离达检测器分离距离;所述第一检测器经配置以检测来自所述第一光脉冲的经散射光;且所述第二检测器经配置以检测来自所述第二光脉冲的经散射光。
74.激光雷达系统,其中:所述扫描仪经配置以使所述光脉冲进行扫描包括所述扫描仪经配置以使与所述第一脉冲相关联的第一光源视野及与所述第二脉冲相关联的第二光源视野跨越所述多个像素而沿着所述扫描方向进行扫描;且所述多个像素包括沿着所述扫描方向而定位的第一像素、第二像素、第三像素、第四像素及第五像素,其中所述第一光源视野或第二光源视野跨越所述多个像素进行扫描且按如下次序遇到所述像素:第一像素、第二像素、第三像素、第四像素、第五像素。
75.激光雷达系统,其中在时间t1处发射所述光脉冲且所述扫描仪进一步经配置以:朝向所述第二像素引导所述第一光脉冲;朝向所述第五像素引导所述第二光脉冲;及使所述第一检测器的视野及所述第二检测器的视野跨越所述多个像素而沿着所述扫描方向进行扫描,其中:所述第一检测器视野在与所述扫描方向相反的方向上从所述所述第一光源视野偏移,其中在时间t1处:所述第一检测器视野与所述第一像素至少部分地重叠;且所述第一光源视野与所述第二像素至少部分地重叠;并且所述第二检测器视野在与所述扫描方向相反的所述方向上从所述第二光源视野偏移,其中在时间t1处:所述第二检测器视野与所述第四像素至少部分地重叠;且所述第二光源视野与所述第五像素至少部分地重叠。
76.激光雷达系统,其进一步包括处理器,所述处理器经配置以至少部分地基于所述第一光脉冲的飞行时间或所述第二光脉冲的飞行时间而确定距一或多个目标的一或多个距离。
77.激光雷达系统,其中所述扫描仪经配置以从所述分裂器接收所述第一光脉冲及所述第二光脉冲。
78.激光雷达系统,其中所述分裂器经配置以从所述扫描仪接收所述所发射光脉冲。
79.激光雷达系统,其中所述分裂器包括全息元件或衍射元件。
80.激光雷达系统,其中所述分裂器经配置以将所述所发射光脉冲大体上均等地分裂成两个脉冲,其中所述第一光脉冲及所述第二光脉冲各自具有所述所发射光脉冲的能量或峰值功率的大约一半。
81.激光雷达系统,其中:所述分裂器经配置以将所述所发射光脉冲分裂成三个角度上分离的光脉冲;所述角度上分离的光脉冲进一步包括第三脉冲;且所述检测器阵列进一步包括第三检测器,所述第三检测器经配置以检测来自所述第三光脉冲的经散射光。
82.激光雷达系统,其中所述角度上分离的光脉冲沿着对应于所述扫描方向的方向而
分裂。
83.激光雷达系统,其中在所述激光雷达系统的最大测程处的所述第一光脉冲与所述第二光脉冲之间的分离距离对应于所述检测器分离距离。
84.激光雷达系统,其中在所述激光雷达系统的最大测程处的所述第一光脉冲与所述第二光脉冲之间的分离距离对应于大于或等于三个像素的奇数个像素。
85.激光雷达系统,其中所述检测器分离距离对应于大于或等于三个像素的奇数个像素。
86.激光雷达系统,其中所述扫描仪进一步经配置以使额外光脉冲沿着对应于与所述扫描方向相反的方向的反向扫描方向进行扫描,所述额外光脉冲由所述光源发射且由所述分裂器分裂。
87.激光雷达系统,其中:所述光源进一步经配置以在所述扫描仪于所述反向扫描方向上进行扫描的同时发射额外光脉冲;所述分裂器进一步经配置以将所述额外光脉冲分裂成角度上分离的第三光脉冲及第四光脉冲;且所述检测器阵列进一步包括第三检测器,其中:所述第二检测器经配置以检测来自所述第四光脉冲的经散射光;且所述第三检测器经配置以检测来自所述第三光脉冲的经散射光。
88.激光雷达系统,其中所述第二检测器与所述第三检测器沿着对应于所述光脉冲的所述扫描方向的所述方向而分离达所述检测器分离距离。
89.一种方法,其包括:由激光雷达系统的光源发射光脉冲;
90.由分裂器将所述所发射光脉冲分裂成包括第一光脉冲及第二光脉冲的两个或两个以上角度上分离的光脉冲;使光脉冲跨越从所述激光雷达系统顺发射方向地定位的多个像素而沿着扫描方向进行扫描,所述光脉冲由所述光源发射且由所述分裂器分裂;由检测器阵列中的第一检测器检测来自所述第一光脉冲的经散射光,其中所述检测器阵列包括所述第一检测器及第二检测器,其中所述第一检测器与所述第二检测器沿着对应于所述光脉冲的所述扫描方向的方向而分离达检测器分离距离;及由所述检测器阵列中的所述第二检测器检测来自所述第二光脉冲的经散射光。
91.所述方法进一步包括:至少部分地基于所述第一光脉冲的飞行时间或所述第二光脉冲的飞行时间而确定距一或多个目标的一或多个距离。
92.所述方法进一步包括:使额外光脉冲沿着对应于与所述扫描方向相反的方向的反向扫描方向进行扫描,所述额外光脉冲由所述光源发射且由所述分裂器分裂。
93.所述方法进一步包括:在所述扫描仪于所述反向扫描方向上进行扫描的同时,由所述光源发射额外光脉冲;由所述分裂器将所述额外光脉冲分裂成角度上分离的第三光脉冲及第四光脉冲;由所述第二检测器检测来自所述第四光脉冲的经散射光;及由所述检测器阵列中的第三检测器检测来自所述第三光脉冲的经散射光。
94.已结合附图描述实施例。然而,应理解,各图并未按比例绘制。距离、角度等仅为说明性的且未必表现与所图解说明的实际尺寸及装置的布局的确切关系。另外,已在细节层次上描述前述实施例以允许所属领域的技术人员制作并使用本文中所描述的装置、系统等。宽广范围的变化形式是可能的。可变更、添加、移除或重新布置组件、元件及/或步骤。尽管已明确地描述特定实施例,但所属领域的技术人员将基于本发明而明了其它实施例。
95.可至少部分地使用计算机软件、硬件、固件或软件、硬件及固件的任何组合而有利
地实施本文中所描述的系统及方法。软件模块可包括用于执行本文中所描述的功能的计算机可执行代码。在一些实施例中,计算机可执行代码由一或多个通用计算机执行。然而,所属领域的技术人员鉴于本发明将了解,可使用将在通用计算机上执行的软件实施的任何模块也可使用硬件、软件或固件的不同组合来实施。举例来说,此模块可使用集成电路的组合而完全实施于硬件中。替代地或另外,此模块可使用经设计以执行本文中所描述的特定功能的专业计算机(而非由通用计算机)来完全地或部分地实施。另外,其中在将方法描述为由计算机软件至少部分地执行或可以由计算机软件至少部分地执行的情况下,应理解,此类方法可提供于计算机可读媒体(例如,光盘(例如cd或dvd)、硬盘驱动器、快闪存储器、磁盘等等)上,所述计算机可读媒体在由计算机或其它处理装置读取时致使所述计算机或其它处理装置执行所述方法。
96.尽管已明确地描述特定实施例,但所属领域的技术人员将基于本发明而明了其它实施例。因此,打算参考权利要求书而非仅关于所明确描述的实施例而界定本发明的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。