1.本发明涉及一种基于谐波减速器的足式空间机器人关节在反驱工作模式下的摩擦模型辨识方法,属于空间机器人动力学参数辨识及建模领域,可用于存在反驱特性的空间驱动组件的动力学建模与算法补偿设计等过程。
背景技术:
2.随着深空探测任务的不断发展,地外天体的撞击坑等存在大量非结构化地形的区域成为探测热点,而足式机器人相比轮式星球车针对非结构化的地形具有更好的通过性,因此也更有利于探测范围和科学任务的拓展。
3.不同于轮式星球车,足式机器人的关节除存在正驱工作模式外(输出端力矩与转速同向),为了避免与足端与地面间的硬接触,缓和机器人本体结构及有效载荷所承受的冲击力,还存在反驱工作模式(输出端力矩与转速反向)。反驱工作模式下,关节正向输出力矩与反驱摩擦力矩共同作用,消耗外部冲击能量,实现触地缓冲。若无法有效辨识关节反驱摩擦力矩的模型,则反驱过程的关节正向输出力矩控制误差较大,难以实现理想的触地缓冲效果;此外,足式机器人多采用谐波减速器作为传动组件,关节负载能力受谐波减速器能力的限制,若控制误差过大将使得谐波减速器的实际承载超限,从而导致关节结构受损甚至产生强度破坏。与传统的行星齿轮减速器等不同,谐波减速器为多齿啮合且柔轮存在扭转和弯曲变形,润滑特性与温度、力矩及转速等条件相耦合,通过解析计算的方式很难求解本文研究对象的内部摩擦特性参数变化规律。因此,通过试验设计获得足式机器人关节的反驱特性标定数据与模型辨识十分必要。本发明针对足式空间机器人的反驱摩擦模型的识别问题提出了一种多参数标定试验及模型辨识方法。
4.目前,针对空间机器人关节的动力学模型与控制算法补偿大多只针对正驱过程开展,但对于存在频繁高速反驱且工作温度高低温变化的足式空间机器人关节,尚无针对性的反驱摩擦模型辨识方法。
技术实现要素:
5.本发明的目的是设计一种获取基于谐波减速器的足式空间机器人关节在反驱工作模式下的内部摩擦特性模型的试验设计方法与反驱摩擦模型辨识方法,通过控制变量法(温度、反驱转速、力矩)识别关节的反驱摩擦模型,相比传统的库伦-粘滞摩擦模型,还引入了温度与力矩两种参数的影响,对于反驱摩擦模型的辨识更加精确。
6.一种足式空间机器人关节反驱特性参数辨识方法,其机械部分包括高低温真空罐、关节、关节输出轴、轴承支架、磁流体密封轴、力矩传感器、联轴器、超载离合器、减速器和反拖电机,关节包括速度旋变、第二电机、谐波减速器和位置旋变;
7.其中的高低温真空罐用于模拟在轨环境,实现关节的真空及多温度点t的标定条件,速度旋变用于实时采集关节的反驱转速数据,电机用于输出主动力矩,经过谐波减速器放大关节输出轴的主动力矩,位置旋变用于实时采集关节输出端的角度数据,轴承支架实
现高低温真空罐的磁流体密封轴与关节输出轴的连接与同轴度调整,磁流体密封轴实现高低温真空罐的真空密封,力矩传感器与磁流体密封轴固连,实施记录关节输出轴处的负载大小,反拖电机与减速器配合输出反拖力矩,驱动关节输出轴实现反驱,超载离合器位于力矩传感器和减速器之间,通过设定离合力矩可约束反驱力矩施加上限,保护关节受载安全,联轴器将力传感器、超载离合器、减速器以及反拖电机固连,实现反驱驱动力矩的传递。
8.所述电机通过设定0速保持模式及电流限幅值iq,当反拖电机设定恒定转速并使得关节实现反驱时,电机工作在电流限幅状态,电机的力矩电流系数为ki,谐波减速器的减速比为nj,即关节输出轴处输出的力矩:
9.tj=iq×ki
×
njꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
10.此时关节处于恒速反驱模式,力矩传感器采集的力矩为ts,则对应的反驱摩擦力:
11.tf=t
s-tjꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
12.减速器的速比为n1,调整反拖电机13的转速改变反驱过程速度旋变的转速可实现关节在不同转速下的反驱摩擦力tf标定,调整电机的限幅电流值iq,关节承载力矩tj随之改变,即实现关节在不同力矩下的反驱摩擦力标定;
13.通过单一变量控制法,分别改变高低温真空罐的温度t、速度旋变的转速关节输出轴的力矩tj三个变量,即可采集多组不同温度、转速及力矩条件下的反驱摩擦力,通过最小二乘法对测试数据进行拟合,可实现对足式空间机器人的关节在反驱工作模式下的摩擦模型的辨识,反驱摩擦力的数学模型如下:
[0014][0015]
其中,m代表第m个温度点,tm代表第m个温度点的温度,上式模型的可视化表达见图2。
[0016]
高低温真空罐将机器人关节的谐波减速器稳定至特定温度tm,反拖电机以恒定转速通过减速器、联轴器、超载离合器、力矩传感器以及磁流体密封轴带动关节反驱,记录此时力矩传感器的力矩ts、速度旋变的转速以及电机的电流iq,根据式(1)及式(2)即可得到温度点tm、转速电流iq下关节反驱摩擦力tf。
[0017]
通过单一变量控制法,分别改变温度点tm、转速电流iq,即可得到多组tf与tm、iq的关系,通过最小二乘法线性拟合,即可得到反驱摩擦力的数学模型,如式(3)所示。
[0018]
本发明与现有技术相比,具有以下有益效果:
[0019]
1、本发明针对空间机器人关节在反驱工作模式下的摩擦模型开展了辨识工作,有利于机器人在缓冲过程中的精准力控;
[0020]
2、本发明对高低温条件、转速以及力矩等多参数,通过单一变量控制法,得到多参数摩擦模型,有利于不同在轨环境及使用工况下针对反驱摩擦力实时补偿算法的实现;
[0021]
3、通过获取准确的反驱摩擦模型,可有效实现关节输出端的力矩控制,避免关节输出轴及谐波减速器等部组件超载使用,确保关节承载的安全性。
附图说明
[0022]
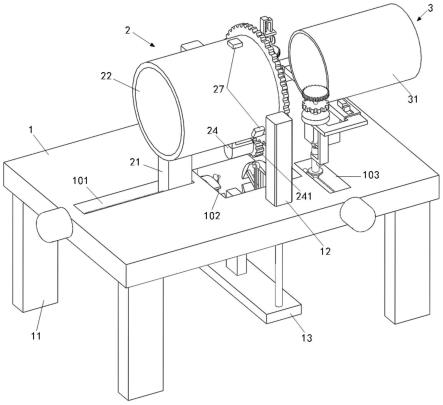
图1是反驱摩擦模型标定方案示意;
[0023]
图2是反驱摩擦模型的可视化表达。
具体实施方式
[0024]
如图1所示,一种足式空间机器人关节反驱特性参数辨识方法,其机械部分包括高低温真空罐1、关节、关节输出轴6、轴承支架7、磁流体密封轴8、力矩传感器9、联轴器10、超载离合器11、减速器12和反拖电机13,关节包括速度旋变2、第二电机3、谐波减速器4和位置旋变5;
[0025]
其中的高低温真空罐1用于模拟在轨环境,实现关节的真空及多温度点t的标定条件,速度旋变2用于实时采集关节的反驱转速数据,电机3用于输出主动力矩,经过谐波减速器4放大关节输出轴8的主动力矩,位置旋变5用于实时采集关节输出端的角度数据,轴承支架6实现高低温真空罐1的磁流体密封轴7与关节输出轴6的连接与同轴度调整,磁流体密封轴7实现高低温真空罐1的真空密封,力矩传感器9与磁流体密封轴7固连,实施记录关节输出轴6处的负载大小,反拖电机13与减速器12配合输出反拖力矩,驱动关节输出轴6实现反驱,超载离合器11位于力矩传感器9和减速器12之间,通过设定离合力矩可约束反驱力矩施加上限,保护关节受载安全,联轴器10将力传感器9、超载离合器11、减速器12以及反拖电机13固连,实现反驱驱动力矩的传递。
[0026]
所述电机3通过设定0速保持模式及电流限幅值iq,当反拖电机13设定恒定转速并使得关节实现反驱时,电机3工作在电流限幅状态,电机3的力矩电流系数为ki,谐波减速器4的减速比为nj,即关节输出轴6处输出的力矩
[0027]
tj=iq×ki
×
njꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0028]
此时关节处于恒速反驱模式,力矩传感器9采集的力矩为ts,则对应的反驱摩擦力:
[0029]
tf=t
s-tjꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0030]
减速器12的速比为n1,调整反拖电机13的转速改变反驱过程速度旋变2的转速可实现关节在不同转速下的反驱摩擦力tf标定,调整电机3的限幅电流值iq,关节承载力矩tj随之改变,即实现关节在不同力矩下的反驱摩擦力标定;
[0031]
通过单一变量控制法,分别改变高低温真空罐1的温度t、速度旋变2的转速关节输出轴6的力矩tj三个变量,即可采集多组不同温度、转速及力矩条件下的反驱摩擦力,通过最小二乘法对测试数据进行拟合,可实现对足式空间机器人的关节在反驱工作模式下的摩擦模型的辨识,反驱摩擦力的数学模型如下:
[0032][0033]
其中,m代表第m个温度点,tm代表第m个温度点的温度,上式模型的可视化表达见图2。
[0034]
如图1所示,高低温真空罐1将机器人关节的谐波减速器4稳定至特定温度tm,反拖电机13以恒定转速通过减速器12、联轴器10、超载离合器11、力矩传感器9以及磁流体密封轴8带动关节反驱,记录此时力矩传感器9的力矩ts、速度旋变2的转速以及电机3的电流iq,根据式(1)及式(2)即可得到温度点tm、转速电流iq下关节反驱摩擦力tf。
[0035]
通过单一变量控制法,分别改变温度点tm、转速电流iq,即可得到多组tf与tm、iq的关系,通过最小二乘法线性拟合,即可得到反驱摩擦力的数学模型,如式(3)所示。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。