1.本发明属于破拆机器人机械臂的控制领域,具体涉及一种破拆机器人机械臂同步协调控制系统、方法及机械臂。
背景技术:
2.破拆机器人具有小巧紧凑、车小力大、控制精确、机动灵活等特点,主要用于矿山隧道破碎开挖及冶金、水泥炉窑破碎,具备现场危险性大、空间密闭狭窄、空气流通不畅、作业地点多样性等特征。
3.目前,破拆机器人在工作过程中,主要包括以下两种控制方法:(1)由操作手通过视觉的判断,依次通过相应的控制手柄来控制机械臂的动作,不仅增加了操作的复杂性,还降低了破拆机器人的工作效率。(2)通过调试经验在程序中固化来调整破拆机器人机械臂的同步动作,虽然能达到破拆机器人的1号臂和2号臂同步动作,但其水平协调性不理想,对工作点的定位有偏移。
技术实现要素:
4.针对上述问题,本发明提出一种破拆机器人机械臂同步协调控制系统、方法及破拆机器人机械臂,能够降低操作复杂性,提高作业工作效率,实现智能化控制破拆机器人三段式机械臂中的1号臂和2号臂同步协调动作。
5.为了实现上述技术目的,达到上述技术效果,本发明通过以下技术方案实现:
6.第一方面,本发明提供了一种破拆机器人机械臂同步协调控制系统,包括:操作手柄、角位移传感器、控制器、第一电磁阀、第二电磁阀、第三电磁阀、第四电磁阀;
7.所述角位移传感器用于采集机械臂中2号臂与水平方向夹角的角度值;
8.所述第一电磁阀、第二电磁阀用于与机械臂中的1号油缸相连,所述1号油缸与机械臂中的1号臂相连;
9.所述第三电磁阀、第四电磁阀用于与机械臂中的2号油缸相连,所述2号油缸与机械臂中的2号臂相连;
10.所述控制器的输入端分别与操作手柄和所述角位移传感器相连,基于接收到的2号臂与水平方向夹角的角度值和操作手柄的摆动方向,分别控制所述第一电磁阀、第二电磁阀、第三电磁阀、第四电磁阀,使得机械臂中2号臂与1号臂同步水平前伸或后退。
11.可选地,当控制器判定出操作手柄的摆动方向后,输出电流i1至第一电磁阀或第二电磁阀,输出电流i2给第三电磁阀或第四电磁阀,并且保持电流i1与电流i2的值相等;
12.所述控制器采集角位移传感器输出的2号臂与水平方向夹角的角度值,并判定该角度值是否在预设角度范围内,如果角度值在预设角度范围内,表明1号臂和2号臂为同步协调水平伸出或后退,如果角度值不在预设角度范围内,表明1号臂和2号臂未达到同步协调水平伸出,控制器基于该角度值判断2号臂处于水平方向的下方或上方,并基于判断结果增大或减小电流i2,同时保持电流i1不变,直至角位移传感器输出的2号臂与水平方向夹角
的角度值位于预设角度范围内,然后保持电流i1与电流i2的值相等。
13.可选地,所述预设角度范围为-3
°
~3
°
。
14.可选地,若控制器判断出2号臂处于水平方向的下方,则保持电流i1不变,并增大电流i2;若控制器判断出2号臂处于水平方向的上方,则控保持电流i1不变,并减小电流i2。
15.可选地,当操作手柄向后摆动,表明1号臂和2号臂要进行同步水平后退动作;当操作手柄向前摆动,表明1号臂和2号臂要进行同步水平前进动作。
16.第二方面,本发明提供了一种破拆机器人机械臂同步协调控制方法,包括:
17.利用角位移传感器采集机械臂中2号臂与水平方向夹角的角度值,并发送至控制器;
18.利用控制器判断操作手柄的摆动方向,并基于接收到的2号臂与水平方向夹角的角度值和操作手柄的摆动方向,分别控制与其相连的第一电磁阀、第二电磁阀、第三电磁阀、第四电磁阀,使得机械臂中2号臂与1号臂同步水平前伸或后退,其中,所述第一电磁阀、第二电磁阀用于与机械臂中的1号油缸相连,所述1号油缸与机械臂中的1号臂相连;所述第三电磁阀、第四电磁阀用于与机械臂中的2号油缸相连,所述2号油缸与机械臂中的2号臂相连。
19.可选地,所述分别控制与其相连的第一电磁阀、第二电磁阀、第三电磁阀、第四电磁阀,使得机械臂中2号臂与1号臂同步水平前伸或后退,具体包括:
20.当控制器判定出操作手柄的摆动方向后,输出电流i1至第一电磁阀或第二电磁阀,输出电流i2给第三电磁阀或第四电磁阀,并且保持电流i1与电流i2的值相等;
21.所述控制器采集角位移传感器输出的2号臂与水平方向夹角的角度值,并判定该角度值是否在预设角度范围内,如果角度值在预设角度范围内,表明1号臂和2号臂为同步协调水平伸出或后退,如果角度值不在预设角度范围内,表明1号臂和2号臂未达到同步协调水平伸出,控制器基于该角度值判断2号臂处于水平方向的下方或上方,并基于判断结果增大或减小电流i2,同时保持电流i1不变,直至角位移传感器输出的2号臂与水平方向夹角的角度值位于预设角度范围内,然后保持电流i1与电流i2的值相等。
22.可选地,所述预设角度范围为-3
°
~3
°
。
23.可选地,若控制器判断出2号臂处于水平方向的下方,则保持电流i1不变,并增大电流i2;若控制器判断出2号臂处于水平方向的上方,则控保持电流i1不变,并减小电流i2。
24.可选地,当操作手柄向前摆动,表明1号臂和2号臂要进行同步水平后退动作,所述控制器分别向第一电磁阀和第三电磁阀输出电流i1和电流i2;
25.当操作手柄向后摆动,表明1号臂和2号臂要进行同步水平前进动作,所述控制器分别向第二电磁阀和第四电磁阀输出电流i1和电流i2。
26.第三方面,本发明提供了一种破拆机器人机械臂,包括第一方面中任一项所述的破拆机器人机械臂同步协调控制系统。
27.与现有技术相比,本发明的有益效果:
28.本发明基于现有破拆机器人机械臂的控制原理,通过角位移传感器的角度反馈,以及相应的控制策略,控制相关电磁阀的动作,进而实现破拆机器人三段式机械臂中的1号臂和2号臂同步协调动作,最终可使1号臂和2号臂同步水平前伸或后退,可保证在不移动破拆机器人的情况下,同时操作1号臂和2号臂即可调整破拆机器人的工作点,从而提高工作
效率。
29.进一步地,基于本发明提出的协调控制系统,操作手通过单个操作手柄即可同时操作1号臂和2号臂同步协调动作,从而可使1号臂和2号臂同步水平前伸或后退,降低了操作的复杂性,可使操作手快速上手。
附图说明
30.为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本发明作进一步详细的说明,其中:
31.图1为本发明一种实施例中破拆机器人机械臂同步协调控制系统原理框图;
32.图2为本发明一种实施例中破拆机器人机械臂同步协调控制方法流程示意图;
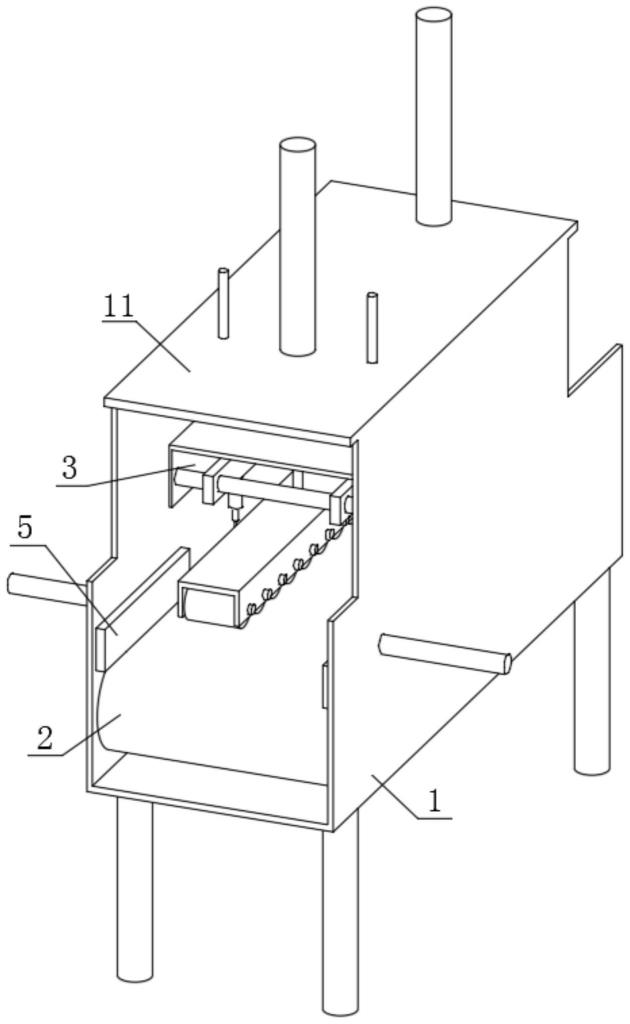
33.图3为本发明一种实施例中破拆机器人机械臂的结构组成示意图;
34.1-1号油缸,2-1号臂,3-角位移传感器,4-2号油缸,5-2号臂,1-3号油缸,7-3号臂,8-4号油缸,9-破碎锤,10-操作手柄,11-控制器,12-第一电磁阀,13-第二电磁阀,14-第三电磁阀,15-第四电磁阀。
具体实施方式
35.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明的保护范围。
36.下面结合附图对本发明的应用原理作详细的描述。
37.实施例1
38.本发明实施例中提供了一种破拆机器人机械臂同步协调控制系统,如图1和图3所示,包括:操作手柄10、角位移传感器3、控制器11、第一电磁阀12、第二电磁阀13、第三电磁阀14、第四电磁阀15;
39.所述角位移传感器3用于采集机械臂中2号臂5与水平方向夹角的角度值,具体地,所述角位移传感器3装在1号臂2与2号臂5的铰点连接处,角位移传感器3的输出轴可以与2号臂5的铰点一起转动,从而发生角度变化;
40.所述第一电磁阀12、第二电磁阀13用于与机械臂中的1号油缸1,所述1号油缸1与机械臂中的1号臂2相连,用于控制1号臂2的伸出与缩回;
41.所述第三电磁阀14、第四电磁阀15用于与机械臂中的2号油缸4,所述2号油缸4与机械臂中的2号臂5相连,用于控制2号臂5的伸出与缩回;
42.所述控制器11的输入端分别与操作手柄10和所述角位移传感器3相连,基于接收到的2号臂5与水平方向夹角的角度值和操作手柄10的摆动方向,分别控制所述第一电磁阀12、第二电磁阀13、第三电磁阀14、第四电磁阀15,使得机械臂中2号臂5与1号臂2同步水平前伸或后退。
43.本发明实施例中的破拆机器人机械臂同步协调控制系统,基于现有破拆机器人机械臂的控制原理,通过角位移传感器3的角度反馈,以及相应的控制策略,控制相关电磁阀的动作,进而实现破拆机器人三段式机械臂中的1号臂2和2号臂5同步协调动作,最终可使1号臂2和2号臂5同步水平前伸或后退,可保证在不移动破拆机器人的情况下,同时操作1号
臂2和2号臂5即可调整破拆机器人的工作点,从而提高工作效率。
44.在本发明实施例的一种具体实施方式中,当操作手操作操作手柄10后,首先由控制器11判断操作手柄10的摆动方向;当操作手柄10向后摆动,表明1号臂2和2号臂5要进行同步水平后退动作;当操作手柄10向前摆动,表明1号臂2和2号臂5要进行同步水平前进动作;
45.当控制器11判定出操作手柄10的摆动方向后,输出电流i1至第一电磁阀12或第二电磁阀13,输出电流i2给第三电磁阀14或第四电磁阀15,并且保持电流i1与电流i2的值相等;
46.进一步地,所述控制器11采集角位移传感器3输出的2号臂5与水平方向夹角的角度值,并判定该角度值是否在预设角度范围内,如果角度值在预设角度范围内,表明1号臂2和2号臂5为同步协调水平伸出或后退,如果角度值不在预设角度范围内,表明1号臂2和2号臂5未达到同步协调水平伸出,控制器11基于该角度值判断2号臂5处于水平方向的下方或上方,并基于判断结果增大或减小电流i2,同时保持电流i1不变,直至角位移传感器3输出的2号臂5与水平方向夹角的角度值位于预设角度范围内,然后保持电流i1与电流i2的值相等。具体地,若控制器11判断出2号臂5处于水平方向的下方,则保持电流i1不变,并增大电流i2;若控制器11判断出2号臂5处于水平方向的上方,则控保持电流i1不变,并减小电流i2。
47.优选地,所述预设角度范围为-3
°
~3
°
,控制精度高,可保证1号臂和2号臂同时运动的水平前伸和后缩,从而保证定位的准确性。
48.下面结合一具体实施方式对本发明实施例中的破拆机器人机械臂同步协调控制系统及其工作原理进行详细说明。
49.如图3所示,破拆机器人的机械臂包括1号油缸1、1号臂2、角位移传感器3、2号油缸4、2号臂5、3号油缸6、3号臂7、4号油缸8和破碎锤9,1号油缸1的一端与回转平台基座的铰点连接,另一端与1号臂2的铰点连接,1号臂2的一端与回转平台的基座铰点连接,另一端与2号臂5通过铰点进行连接,2号臂5的另一端通过铰点与3号臂7进行连接,角位移传感器3安装在1号臂2与2号臂5的铰点连接处,2号油缸4一端连接在回转平台,另一端与2号臂5进行连接,3号油缸6一端与2号臂5进行连接,另一端与3号臂7的铰点进行连接,4号油缸8一端与3号臂7的铰点进行连接,另一端与破碎锤9通过连杆机构进行连接,2号臂5与3号臂7通过铰点进行连接。
50.本发明实施例中的破拆机器人机械臂同步协调控制系统主要是为实现破拆机器人1号臂2和2号臂5的同步协调控制,本发明实施例中的第一电磁阀12为图2中的电磁阀y1.1,第二电磁阀13为图2中的电磁阀y1.2,第三电磁阀14为图2中的电磁阀y2.1,第四电磁阀15为图2中的电磁阀y2.2,如图2所示,具体的控制策略为:
51.首先,控制器11判定操作手柄10的摆动方向;
52.如果操作手柄10向前摆动,表明此时1号臂2和2号臂5要进行同步伸出动作,则由控制器11输出控制第一电磁阀12的给定电流i1,输出控制第三电磁阀14的给定电流i2,并且保持电流i1与电流i2的值相等,此时,1号油缸1伸出带动1号臂2的伸出,2号油缸4伸出带动2号臂5的伸出。
53.进一步地,控制器11采集角位移传感器3的信号,可知2号臂5与水平方向的夹角a1
的角度值,并判定夹角a1的值是否在预设角度范围-3
°
与3
°
之间(在具体实施过程中,也可以设置其他的预设角度范围,根据实际情况来确定即可),如果夹角a1的值在该区间内,表明1号臂2和2号臂5为同步协调水平伸出,如果夹角a1的值不在该区间,表明1号臂2和2号臂5未达到同步协调水平伸出,控制器11再进一步判断2号臂5是在水平方向的下方还是在水平方向的上方,如果2号臂5在水平方向的下方,控制器11给定第一电磁阀12的电流i1保持不变,控制器11给定第三电磁阀14的电流i2增大,此时第二电磁阀13和第四电磁阀15的控制电流为零,这样可使2号臂5的动作速度加快。如果2号臂5在水平方向的上方,控制器11给定第一电磁阀12的电流i1保持不变,控制器11给定第三电磁阀14的电流i2减小,这样可使2号臂5的动作速度减慢。这个过程持续直到控制器11采集到的角位移传感器3的角度值a1在-3度与3度之间后,控制器11输出控制第一电磁阀12的给定电流i1,输出控制第三电磁阀14的给定电流i2,并且保持电流i1与电流i2的值相等,这样就完成了破拆机器人1号臂2和2号臂5同步协调水平伸出动作。
54.如果操作手柄10向后摆动,表明此时1号臂2和2号臂5要进行同步水平后退动作,此时控制器11输出控制第二电磁阀13的给定电流i1,输出控制第四电磁阀15的给定电流i2,并且保持电流i1与电流i2的值相等,此时,1号油缸1缩回带动1号臂2的后退,2号油缸4缩回带动2号臂5的后退。
55.进一步地,控制器11采集角位移传感器3的信号,可知2号臂5与水平方向的夹角a1的角度值,并判定夹角a1的值是否在-3度与3度之间,如果夹角a1的值在该区间,表明1号臂2和2号臂5为同步协调水平后退,如果夹角a1的值不在该区间,表明1号臂2和2号臂5未达到同步协调水平后退,控制器11再进一步判断2号臂5是在水平方向的下方还是在水平方向的上方,如果2号臂5在水平方向的下方,控制器11给定第二电磁阀13的电流i1保持不变,控制器11给定第四电磁阀15的电流i2增大,此时第一电磁阀12和第三电磁阀14的控制电流为零,这样可使2号臂5的动作速度加快。如果2号臂5在水平方向的上方,控制器11给第二定电磁阀的电流i1保持不变,控制器11给定第四电磁阀15的电流i2减小,此时第一电磁阀12和第三电磁阀14的控制电流为零,这样可使2号臂5的动作速度减慢。这个过程持续直到控制器11采集到的角位移传感器3的夹角a1的值在-3度与3度之间后,控制器11输出控制第二电磁阀13的给定电流i1,输出控制第四电磁阀15的给定电流i2,并且保持i1与i2的值相等,这样就完成了破拆机器人1号臂2和2号臂5同步协调水平后退动作。
56.实施例2
57.本发明实施例中提供了一种破拆机器人机械臂同步协调控制方法,包括以下步骤:
58.(1)利用角位移传感器3采集机械臂中2号臂5与水平方向夹角的角度值,并发送至控制器11;
59.(2)利用控制器11判断操作手柄10的摆动方向,并基于接收到的2号臂5与水平方向夹角的角度值和操作手柄10的摆动方向,分别控制与其相连的第一电磁阀12、第二电磁阀13、第三电磁阀14、第四电磁阀15,使得机械臂中2号臂5与1号臂2同步水平前伸或后退,其中,所述第一电磁阀12、第二电磁阀13用于与机械臂中的1号油缸1,所述1号油缸1与机械臂中的1号臂2相连;所述第三电磁阀14、第四电磁阀15用于与机械臂中的2号油缸4,所述2号油缸4与机械臂中的2号臂5相连。
60.在本发明实施例的一种具体实施方式中,所述分别控制与其相连的第一电磁阀12、第二电磁阀13、第三电磁阀14、第四电磁阀15,使得机械臂中2号臂5与1号臂2同步水平前伸或后退,具体包括:
61.当控制器11判定出操作手柄10的摆动方向后,输出电流i1至第一电磁阀12或第二电磁阀13,输出电流i2给第三电磁阀14或第四电磁阀15,并且保持电流i1与电流i2的值相等;
62.所述控制器11采集角位移传感器3输出的2号臂5与水平方向夹角的角度值,并判定该角度值是否在预设角度范围内,如果角度值在预设角度范围内,表明1号臂2和2号臂5为同步协调水平伸出或后退,如果角度值不在预设角度范围内,表明1号臂2和2号臂5未达到同步协调水平伸出,控制器11基于该角度值判断2号臂5处于水平方向的下方或上方,并基于判断结果增大或减小电流i2,同时保持电流i1不变,直至角位移传感器3输出的2号臂5与水平方向夹角的角度值位于预设角度范围内,然后保持电流i1与电流i2的值相等。
63.若控制器11判断出2号臂5处于水平方向的下方,则保持电流i1不变,并增大电流i2;若控制器11判断出2号臂5处于水平方向的上方,则控保持电流i1不变,并减小电流i2。
64.优选地,所述预设角度范围为-3
°
~3
°
,控制精度高,可保证1号臂和2号臂同时运动的水平前伸和后缩,从而保证定位的准确性。
65.在本发明实施例的一种具体实施方式中,当操作手柄10向前摆动,表明1号臂2和2号臂5要进行同步水平后退动作,所述控制器11分别向第一电磁阀12和第三电磁阀14输出电流i1和电流i2;
66.当操作手柄10向后摆动,表明1号臂2和2号臂5要进行同步水平前进动作,所述控制器11分别向第二电磁阀13和第四电磁阀15输出电流i1和电流i2。
67.本发明实施例中的破拆机器人机械臂同步协调控制方法可以基于实施例1中的破拆机器人机械臂同步协调控制系统来实现。
68.实施例3
69.本发明实施例中提供了一种破拆机器人机械臂,包括实施例1中任一项所述的破拆机器人机械臂同步协调控制系统。
70.具体地,如图3所示,破拆机器人的机械臂包括1号油缸1、1号臂2、角位移传感器3、2号油缸4、2号臂5、3号油缸6、3号臂7、4号油缸8、破碎锤9和破拆机器人机械臂同步协调控制系统,1号油缸1一端与回转平台基座的铰点连接,另一端与1号臂2的铰点连接,1号臂2的一端与回转平台的基座铰点连接,另一端与2号臂5通过铰点进行连接,2号臂5的另一端通过铰点与3号臂7进行连接,角位移传感器3安装在1号臂2与2号臂5的铰点连接处,2号油缸4一端连接在回转平台,另一端与2号臂5进行连接,3号油缸6一端与2号臂5进行连接,另一端与3号臂7的铰点进行连接,4号油缸8一端与3号臂7的铰点进行连接,另一端与破碎锤9通过连杆机构进行连接,2号臂5与3号臂7通过铰点进行连。
71.如图1所示,所述破拆机器人机械臂同步协调控制系统,包括:操作手柄10、角位移传感器3、控制器11、第一电磁阀12、第二电磁阀13、第三电磁阀14、第四电磁阀15;
72.所述角位移传感器3用于采集机械臂中2号臂5与水平方向夹角的角度值,角位移传感器3装在1号臂2与2号臂5的铰点连接处,角位移传感器3的输出轴可以与2号臂5的铰点一起转动,从而发生角度变化;
73.所述第一电磁阀12、第二电磁阀13用于与机械臂中的1号油缸1,所述1号油缸1与机械臂中的1号臂2相连,用于控制1号臂2的伸出与缩回;
74.所述第三电磁阀14、第四电磁阀15用于与机械臂中的2号油缸4,所述2号油缸4与机械臂中的2号臂5相连,用于控制2号臂5的伸出与缩回;
75.所述控制器11的输入端分别与操作手柄10与所述角位移传感器3相连,基于接收到的2号臂5与水平方向夹角的角度值和操作手柄10的摆动方向,分别控制所述第一电磁阀12、第二电磁阀13、第三电磁阀14、第四电磁阀15,使得机械臂中2号臂5与1号臂2同步水平前伸或后退。
76.其余部分均与实施例1相同。
77.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。