1.本发明涉及能源智能化开采技术领域,特别涉及一种测量地层边界的方法、系统以及存储介质。
背景技术:
2.在薄层油气资源的开采过程中,需要对地层数据进行精确测量,并根据测量结果确定开采位置以及相应开采操作。
3.通常使用随钻测井系统对地层数据进行测量,常规的随钻测井系统由于测量地层数据的测点距离井底比较远,一般有10到15米的距离,且其内部是由实体线缆连接,以完成信号传输过程。该过程中当钻遇地层边界时,不能及时地测量出地层边界的变化,当仪器测量值发生变化时,钻头往往已经处于偏离油气储层较远的位置,井眼走向调整会损失较长的储层,同时也极大增加了地质导向的复杂度。为了解决这一问题,现有技术中也出现了一些近钻头系统,即可以在距离钻头位置较近的地方进行方位伽马的测量,但该方式仅能够测量方位伽马,这对于复杂地下环境信息的获取还无法提供准确的信息。
4.由此可见,现有技术中的随钻测井系统以及近钻头系统都无法及时且准确的测量出地层边界的变化,导致钻头位置偏移。
技术实现要素:
5.本发明实施例提供一种测量地层边界的方法、系统以及存储介质,用于解决现有技术中的随钻测井系统以及近钻头系统都无法及时且准确的测量出地层边界的变化,导致钻头位置偏移的问题,具体方法如下:
6.第一方面,本发明实施例提供一种测量地层边界的方法,该方法应用于测量地层系统,所述方法包括:
7.根据接收到的指令,确定工作状态;
8.当所述工作状态为测量地层数据时,获取用于描述所处地层位置的位置信息;
9.根据所述位置信息确定所述测量地层系统的钻头前进方向。
10.其中,所述根据接收到的指令,确定工作状态,包括:
11.当所述指令为进入睡眠状态时,所述测量地层系统的近钻头短节模块的工作状态为处于转运及短时储存状态。
12.其中,所述根据接收到的指令,确定工作状态,包括:
13.当所述指令为进入待机状态时,所述测量地层系统的近钻头短节模块的工作状态为进入就绪状态。
14.其中,所述近钻头短节模块包括近钻头发射短节模块与近钻头接收短接模块,所述根据接收到的指令,确定工作状态,包括:
15.检测所述近钻头发射短节模块与所述测量地层系统的套管的第一相对位置;
16.检测所述近钻头接收短节模块与所述套管的第二相对位置;
17.当所述第一相对位置与所述第二相对位置均大于预设位置时,所述指令为进入工作状态,确定所述近钻头发射短节模块与所述近钻头接收短节模块的工作状态为测量地层数据。
18.其中,所述获取用于描述所处地层位置的位置信息,包括:
19.所述测量地层系统的近钻头短节模块中设置有用于测量井斜以及滚转角的传感器;
20.根据测量到的所述井斜以及所述滚转角,确定所述测量地层系统的钻头端所处位置信息。
21.其中,所述根据所述位置信息确定所述测量地层系统的钻头前进方向,包括:
22.当所述钻头端所处位置信息与预设位置信息不同时,所述钻头端依据所述井斜以及滚转角所确定的方向继续前进;
23.当所述钻头端所处位置信息与预设位置信息相同时,所述传感器获取电阻率以及伽马射线的返回值,并根据所述电阻率以及所述返回值确定所述钻头的前进方向。
24.其中,所述根据所述电阻率以及所述返回值确定所述钻头的前进方向,包括:
25.当所述电阻率以及所述返回值确定所述钻头与上方地层的位置小于第一预设位置时,所述钻头下移预设位置得到第一目标位置,所述前进方向根据所述第一目标位置确定;
26.当所述电阻率以及所述返回值确定所述钻头与上方地层的位置大于第一预设位置时,所述钻头上移预设位置得到第二目标位置,所述前进方向根据所述第二目标位置确定。
27.其中,所述根据所述电阻率以及所述返回值确定所述钻头的前进方向,包括:
28.根据所述电阻率以及所述返回值,分别确定出所述钻头与上方地层的上方距离值,以及所述钻头与下方地层的下方距离值;
29.当所述上方距离值与所述下方距离值之差小于第二预设位置值时,所述钻头下移预设位置得到第一目标位置,所述前进方向根据所述第一目标位置确定;
30.当所述上方距离值与所述下方距离值之差大于第二预设位置值时,所述钻头上移预设位置得到第二目标位置,所述前进方向根据所述第二目标位置确定。
31.其中,所述方法还包括:
32.所述测量地层系统测量到的井斜、伽马射线返回值、电阻率、所述测量地层系统的钻头与上方地层之间的距离值,以及所述钻头与下方地层之间的距离值以可视化的方式显示在屏幕上。
33.其中,所述方法还包括:
34.对所述测量地层系统测量到的井斜、伽马射线返回值、电阻率进行增强、滤波、去噪处理。
35.第二方面,本发明实施例提供一种测量地层系统,所述系统包括:
36.确定模块,用于根据接收到的指令,确定工作状态;
37.获取模块,用于当工作状态为测量地层数据时,获取用于描述所处地层位置的位置信息;
38.操作模块,用于根据所述位置信息确定所述测量地层系统的钻头前进方向。
39.第三方面,本发明实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述的方法。
40.本发明实施例提供的测量地层边界的方法,根据接收到的指令,确定工作状态;当所述工作状态为测量地层数据时,获取用于描述所处地层位置的位置信息;根据所述位置信息确定所述测量地层系统的钻头前进方向。该方法可在近钻头的位置测量方位伽马的同时测量电阻率,以此解决现有技术中的随钻测井系统以及近钻头系统都无法及时且准确的测量出地层边界的变化,导致钻头位置偏移。
附图说明
41.图1是本发明实施例提供的一种测量地层系统结构参考图;
42.图2是本发明实施例提供的测量地层边界的方法流程图;
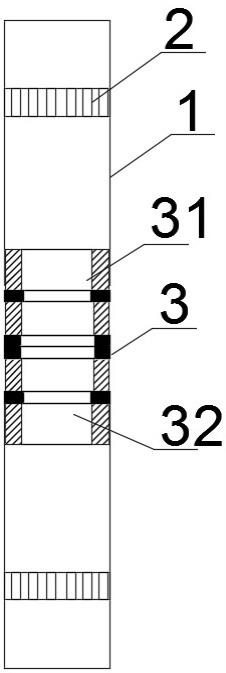
43.图3是本发明实施例提供的一种测量地层系统结构示意图。
具体实施方式
44.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
45.如图1所示,本技术提供的测量地层系统结构参考图如图1所示,其中包括近钻头发射短节模块、近钻头接收短节模块、钻头端、螺杆、钻杆钻具组合以及mwd系统(也可以是lwd系统),在实际应用过程中,该测量地层系统结构可与远程系统以及地面系统进行信息交互。应用于该系统的技术方案如下:
46.如图2所示,一种测量地层边界的方法,用于解决现有技术中存在的技术问题,具体方法如下,
47.步骤21,根据接收到的指令,确定工作状态;
48.步骤22,当工作状态为测量地层数据时,获取用于描述所处地层位置的位置信息;
49.步骤23,根据所述位置信息确定所述测量地层系统的钻头前进方向。
50.根据用户的操作,测量地层系统会处于不同的工作状态,不同的工作状态将导致后续工作内容不同。测量地层系统的近钻头短节模块内置大容量电池,同时结合智能的电源管理系统,连续测量工作时间可达200小时以上。测量地层系统具有睡眠、待机、测量三种状态,可在各种工况下灵活调整电源策略。具体步骤21包括以下几种情况:
51.第一种,当所述指令为进入睡眠状态时,所述测量地层系统的近钻头短节模块的工作状态为处于转运及短时储存状态。即当测量地层系统刚刚被生产出来,或者离具体应用还有较长一段时间,可以使测量地层系统处于睡眠状态,例如,在车间安装并接通电池后,即可通过配置工具使近钻头短节模块进入睡眠状态,然后进行转运及短时储存,睡眠状态可待机半年以上,能耗仅为电池容量的1%。
52.第二种,检测所述近钻头发射短节模块与所述测量地层系统的套管的第一相对位置;检测所述近钻头接收短节模块与所述套管的第二相对位置;当所述第一相对位置与所述第二相对位置均大于预设位置时,所述指令为进入工作状态,所述近钻头发射短节模块与所述近钻头接收短节模块的工作状态为测量地层数据。例如,当近钻头发射短节模块以及近钻头接收短节模块离开套管后,自然会跟套管之间产生第一相对位置,以及第二相对
位置,即第一相对位置为近钻头发射短节模块离开套管后与套管之间的距离,第二相对位置为近钻头发射短节模块离开套管后与套管之间的距离。当第一相对位置与第二相对位置都大于预设位置时,则可确定近钻头发射短节模块与近钻头接收短节模块分别离开套管,此时说明测量地层系统以及所述近钻头发射短节模块与所述近钻头接收短节模块的工作状态为测量地层数据。
53.第三种,当所述指令为进入待机状态时,所述测量地层系统的近钻头短节模块的工作状态为进入就绪状态。
54.在实际施工过程中,安装完钻头后,首先进行唤醒操作,唤醒后近钻头短节模块进入就绪状态。测量地层系统进行下钻,在下钻过程中不会启动测量与发射等相关操作。等测量地层系统到达指定位置时,会启动近钻头短节模块,当近钻头接收短节模块以及近钻头发射短节模块均出套管之后,可随时进行打钻,钻头发射短节模块将对测量到的电阻率及方位伽马进行自适应测量与传输。当停止打钻后,近钻头短节模块将自动回到就绪状态,以节省电力。当完钻后,起出近钻头短节模块,在井架上采用配置盒进行休眠处理,近钻头发射短节模块即进入低功耗模式。
55.步骤22中的取用于描述所处地层位置的位置信息,包括以下步骤:
56.所述测量地层系统的近钻头短节模块中设置有用于测量井斜以及滚转角的传感器;
57.根据测量到的所述井斜以及所述滚转角,确定所述测量地层系统的钻头端所处位置信息。在确定所处位置信息后,步骤23中的所述根据所述位置信息确定所述测量地层系统的钻头前进方向,包括以下步骤:
58.当所述钻头端所处位置信息与预设位置信息不同时,所述钻头端依据所述井斜以及滚转角所确定的方向继续前进;
59.当所述钻头端所处位置信息与预设位置信息相同时,所述传感器获取电阻率以及伽马射线的返回值,并根据所述电阻率以及所述返回值确定所述钻头的前进方向。
60.在上述过程中,当测量得到的近钻头端所处的位置信息与预设位置信息相同时,说明测量地层系统到达指定位置,否则还未到达指定位置。
61.当近钻头发射短节模块集成了方位伽马模块、旋转测斜模块、电阻率测量模块、电池模块,可在钻头选转时自动进行各方位的伽马射线统计。当测量地层系统到达指定位置后需要调整前进方向以对目标地层进行测量。具体调整方式包括如下几种:
62.第一种,
63.当所述电阻率以及所述返回值确定所述钻头与上方地层的位置小于第一预设位置时,所述钻头下移预设位置得到第一目标位置,所述前进方向根据所述第一目标位置确定;例如,根据电阻率以及返回值判断钻头与上方地层的位置,当钻头与上方地层的位置小于第一预设位置时,说明钻头过于贴近上方地层,此时继续前行可能会到达别的地层导致测量数据不准确,因此需要下移预设位置,使得钻头保持在第一目标位置,即钻头与上地层和下地层之间有个合理的距离。
64.当所述电阻率以及所述返回值确定所述钻头与上方地层的位置大于第一预设位置时,所述钻头上移预设位置得到第二目标位置,所述前进方向根据所述第二目标位置确定。即钻头过于贴近下方地层,此时应该向上移动到达第二目标位置,以使得钻头与上、下
地层处于合理的位置。
65.第二种,
66.根据所述电阻率以及所述返回值,分别确定出所述钻头与上方地层的上方距离值,以及所述钻头与下方地层的下方距离值;
67.当所述上方距离值与所述下方距离值之差小于第二预设位置值时,所述钻头下移预设位置得到第一目标位置,所述前进方向根据所述第一目标位置确定;即此时距离上地层过近,需要向下移动到第一目标位置。
68.当所述上方距离值与所述下方距离值之差大于第二预设位置值时,所述钻头上移预设位置得到第二目标位置,所述前进方向根据所述第二目标位置确定。即此时距离下地层过近,需要向上移动到第二目标位置。
69.上述两种方式根据实际需要选择其中一种即可。
70.在一实施例中,所述测量地层系统测量到的井斜、伽马射线返回值、电阻率、所述测量地层系统的钻头与上方地层之间的距离值,以及所述钻头与下方地层之间的距离值以可视化的方式显示在屏幕上。
71.在一实施例中,对所述测量地层系统测量到的井斜、伽马射线返回值、电阻率进行增强、滤波、去噪处理。大于预设位置值时,以及所述接收短节模块的位置信息,均出套管
72.薄层油气资源的开采需要对地层数据进行精确测量。常规随钻测井系统由于测量地层数据的测点距离井底有10到15米的零长,在钻遇地层边界时,不能及时地测量出地层边界的变化,当仪器测量值发生变化时,钻头往往已经处于偏离油气储层较远的位置,井眼走向调整会损失较长的储层,同时也极大增加了地质导向的复杂度。
73.近钻头随钻测量系统,可实现钻头处地层电阻率及伽马射线强度等参数的实时测量,并且不受泥浆侵入的影响,能够及时判断钻头所处地层,并可通过方位伽马成像功能判断钻头是在哪个方向接近某种地层,以便及时调整井眼走向,从而实现钻头的精准坐标控制,提高油层的钻遇率。
74.该系统基于先进的空-时编码通信技术、高速稳定的井斜测量技术、高效的直接载波突发调制技术,保证在恶劣地层条件下的精确测量及可靠通信,具有极强的复杂地层适应能力。
75.以下以具体实施例进行说明:
76.如图1所示,测量地层系统由近钻头发射短节模块、近钻头短节接收模块、钻头端、螺杆、钻杆钻具组合以及mwd系统(也可以是lwd系统)等组成。
77.近钻头发射短节模块集成了方位伽马模块、旋转测斜模块、电阻率测量模块、电池模块,可在钻头选转时自动进行各方位的伽马射线统计。该系统内内置大容量电池,连续测量工作时间可达200小时以上。具有睡眠、待机、测量三种状态,可在各种工况下灵活调整电源策略。在车间安装并接通电池后,即可通过配置工具使近钻头短节模块进入睡眠状态,然后进行转运及短时储存,睡眠状态可待机半年以上,能耗仅为电池容量的1%。
78.在施工时,安装完钻头后,进行唤醒操作,唤醒后近钻头接收和/或发射短节模块进入就绪状态。以进行下钻,下钻过程中不会启动测量与发射。当近钻头发射及接收短节模块均出套管之后,可随时进行打钻,近钻头发射短节模块将对电阻率及方位伽马进行自适应测量与传输。当停止打钻后,近钻头发射短节模块将自动回到就绪状态,以节省电力。
79.当完钻后,起出近钻头发射及接收短节模块,在井架上采用配置盒进行休眠处理,近钻头发射短节模块即进入低功耗模式。
80.近钻头接收短节模块进行近钻头无线信号的调理与解调,安装于远端探管下端,由探管提供电源,可工作于25v至70v的极宽电压范围。近钻头接收短节模块采用了先进的空-时编码技术,时间窗口技术,通过主动降噪有效对抗了低频无线电频段的天电噪声、非高斯噪声等,弱信号调理技术进一步增强了信号增益,结合最大似然估计最优接收机技术,面向香农定理信道容量极限进行了编码及电路优化,并具有自动增益控制功能,以实现对地层的匹配。在地层电阻率低于0.3欧姆
·
米时,仍然可以保持可靠通信。且由于本发明提供的技术方案的过程可使得近钻头发射以及接收短节模块的体积很小,可以应用于直径在178mm左右的井眼,且长度能够控制在50cm以内,且本发明提供的方案可实现电池供电,因此能够连续测量工作达到200小时以上。
81.本发明实施例提供一种测量地层系统,具体结构如图3所示:
82.确定模块31,用于根据接收到的指令,确定工作状态;
83.获取模块32,用于当工作状态为测量地层数据时,获取用于描述所处地层位置的位置信息33;
84.操作模块34,用于根据所述位置信息确定所述测量地层系统的钻头前进方向。
85.确定模块具体用于,当所述指令为进入睡眠状态时,所述测量地层系统的近钻头短节模块的工作状态为处于转运及短时储存状态。
86.确定模块具体用于,当所述指令为进入待机状态时,所述测量地层系统的近钻头短节模块的工作状态为进入就绪状态。
87.所述近钻头短节模块包括近钻头发射短节模块与近钻头接收短接模块,确定模块具体用于,检测所述近钻头发射短节模块与所述测量地层系统的套管的第一相对位置;检测所述近钻头接收短节模块与所述套管的第二相对位置;当所述第一相对位置与所述第二相对位置均大于预设位置时,所述指令为进入工作状态,确定所述近钻头发射短节模块与所述近钻头接收短节模块的工作状态为测量地层数据。
88.操作模块具体用于,测量地层系统的近钻头短节模块中设置有用于测量井斜以及滚转角的传感器;根据测量到的所述井斜以及所述滚转角,确定所述测量地层系统的钻头端所处位置信息。
89.其中,所述根据所述位置信息确定所述测量地层系统的钻头前进方向,包括:
90.当所述钻头端所处位置信息与预设位置信息不同时,所述钻头端依据所述井斜以及滚转角所确定的方向继续前进;
91.当所述钻头端所处位置信息与预设位置信息相同时,所述传感器获取电阻率以及伽马射线的返回值,并根据所述电阻率以及所述返回值确定所述钻头的前进方向。
92.其中,所述根据所述电阻率以及所述返回值确定所述钻头的前进方向,包括:
93.当所述电阻率以及所述返回值确定所述钻头与上方地层的位置小于第一预设位置时,所述钻头下移预设位置得到第一目标位置,所述前进方向根据所述第一目标位置确定;
94.当所述电阻率以及所述返回值确定所述钻头与上方地层的位置大于第一预设位置时,所述钻头上移预设位置得到第二目标位置,所述前进方向根据所述第二目标位置确
定。
95.其中,所述根据所述电阻率以及所述返回值确定所述钻头的前进方向,包括:
96.根据所述电阻率以及所述返回值,分别确定出所述钻头与上方地层的上方距离值,以及所述钻头与下方地层的下方距离值;
97.当所述上方距离值与所述下方距离值之差小于第二预设位置值时,所述钻头下移预设位置得到第一目标位置,所述前进方向根据所述第一目标位置确定;
98.当所述上方距离值与所述下方距离值之差大于第二预设位置值时,所述钻头上移预设位置得到第二目标位置,所述前进方向根据所述第二目标位置确定。
99.测量地层系统测量到的井斜、伽马射线返回值、电阻率、所述测量地层系统的钻头与上方地层之间的距离值,以及所述钻头与下方地层之间的距离值以可视化的方式显示在屏幕上。
100.本领域普通技术人员可以理解实现上述实施例的全部或部分步骤可以通过硬件来完成,也可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,上述提到的存储介质可以是只读存储器,磁盘或光盘等。
101.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。