1.本发明涉及齿轮箱故障诊断技术领域,特别涉及基于奇异值分解和特征分割多尺度动态卷积网络的齿轮箱小样本故障诊断方法、系统及设备。
背景技术:
2.风能是一种清洁的可再生能源,在我国,风电发电机的逐年递增,保证它们的安全健康运行是维护我国大力发展风能的关键。以齿轮箱为代表的旋转机械是风力发电机最为核心的部件,其健康状况直接影响到整个设备的安全,一旦发生故障,将会造成严重的经济损失,甚至重大人员伤亡。因此对齿轮箱进行及时的故障诊断十分重要。
3.事实上,在实际的工程场景中,旋转机械通常在正常条件下工作,很少出现故障。因此,尽管由多个传感器组成的状态监测系统能够持续的从设备上采集数据,但采集的数据大部分是健康数据,故障数据量较少。在这种情况下,如果直接使用有限的故障数据训练智能诊断模型,则会导致模型泛化性能差,故障分类精度低的问题。总之,较少的数据量通常难以支持智能诊断模型的训练,所以研究出针对少量样本的智能故障诊断方法,对故障诊断领域的发展至关重要。
4.近年来,通过振动数据识别故障类型已成为故障诊断领域的主流,其中基于深度学习的智能故障诊断方法受到了大量学者的青睐。深度学习方法具有以下优点:(1)随着工业设备和智能计算机设备的发展,存储了大量的机械数据。深度学习方法可以从海量数据中提取特征,可以节省大量人力。(2) 深度学习方法可以从历史数据中自动学习抽象和有用的故障特征,因此几乎不依赖专家经验。
5.然而,大多数深度学习方法依赖于数据的数量和质量。如果数据量较小且数据分布不均衡,则会导致深度学习方法的故障诊断性能下降。事实上,在实际工业生产中,很难收集齿轮箱重要机械零件的大量故障数据。总之,当样本数较少时,建立有效的故障诊断模型仍然是一个具有挑战性的问题。
技术实现要素:
6.本发明的目的在于提供一种齿轮箱小样本故障诊断方法、系统及设备,基于奇异值分解对数据进行预处理,并基于特征分割多尺度动态卷积网络进行的齿轮箱小样本故障诊断,解决了在小样本条件和噪声环境下的齿轮箱故障诊断问题。
7.为实现上述目的,本发明采取的技术方案为:
8.第一方面,本发明实施例提供一种齿轮箱小样本故障诊断方法,包括以下步骤:
9.s10、采集不同故障类型的齿轮箱振动信号,以及健康状态下的齿轮箱振动信号,并对故障振动信号设置故障类型标签,构建小样本训练数据集;
10.s20、对所述小样本训练数据集进行基于奇异值分解的滤波处理;
11.s30、构建特征分割多尺度动态卷积网络;包括:两个特征分割多尺度动态卷积层,三个最大池化层,一个全连接层,一个dropout层和一个softmax 层;
12.s40、将滤波处理后的小样本训练数据集输入到所述特征分割多尺度动态卷积网络中,故障类型标签作为网络的期望输出,进行训练;
13.s50、将需要诊断故障的齿轮箱振动信号进行基于奇异值分解的滤波处理,输入训练后的特征分割多尺度动态卷积网络中,得到对应的齿轮箱小样本故障诊断结果。
14.进一步地,所述步骤s10,包括:
15.使用传感器以相同的采样频率采集不同故障类型的齿轮箱振动信号,以及健康状态下的齿轮箱承振动信号;
16.使用预设数量个采样点作为一个样本,根据每个样本对应的故障类型,设置混合故障类型标签,将采集的振动信号构建为小样本训练数据集。
17.进一步地,所述步骤s20中,奇异值分解处理过程如下:
18.假设一维振动信号为x,x的奇异值矩阵为s:
19.s=[diag(σ1,σ2,
…
,σ
l
),0]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0020]
其中,σ1,σ2,
…
,σ
l
表示奇异值,且均大于0;根据奇异值矩阵,建立奇异值差分谱b,奇异值差分谱b表示为:
[0021]
b=(b1,b2,
…
,b
l-1
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0022]bk
=σ
k 1-σ
k k=1,2,
…
,l-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0023]
其中,bk表示两个连续奇异值的差,b用来建立两个相邻奇异值之间的关系;b中出现的最大峰值代表着奇异值的最大突变点,以所述最大突变点作为奇异值阈值点,将所述奇异值阈值点后的奇异值进行归零化处理,并进行奇异值分解后的信号重构。
[0024]
进一步地,所述步骤s30中的特征分割多尺度动态卷积网络,包括:特征分割步骤、多尺度卷积步骤、通道重构注意力步骤和多分支融合步骤。
[0025]
进一步地,所述特征分割步骤,包括:
[0026]
将输入特征x1分割为三个不同分支的子特征x2、x3、x4,每个子特征的尺寸不同;
[0027]
将输入特征和三个不同分支的子特征的尺寸设置为2的指数幂。
[0028]
进一步地,所述多尺度卷积步骤,包括:
[0029]
设置四个卷积层,分别是conv(a1),conv(a2),conv(a3)和conv(a4),四个卷积层对应的输入分别是x1,x2,x3和x4;
[0030]
根据大卷积核提取较大尺寸特征,a2<a3<a4<a1,之后xi通过conv(ai) 输出多尺度特征oi,r表示实数空间集合;li表示特征尺寸;c表示通道数目;公式如下:
[0031]
oi=f(wi·
x bi)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0032]
其中,wi、bi分别代表卷积过程中的权重和偏差;f(
·
)表示bn和relu处理;
[0033]
对o2,o3,和o4进行多分支融合,融合后的征尺寸大小为l1,融合公式如下:
[0034]
oc=o2⊙
o3⊙
o4ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0035]
其中,
⊙
代表逐元素融合,o2,o3和o4的特征尺寸大小分别为l2,l3,l4, oc=[o2,o3,o4],
[0036]
对oc和o1进行特征融合,公式如下:
[0037][0038]
其中,表示逐元素相加,oc和o1通过逐元素相加生成o。
[0039]
进一步地,所述通道重构注意力步骤,包括:
[0040]
使用全局平均池化层生成通道向量:假设输入特征为o,经过全局平均池化层后生成通道向量z,公式如下:
[0041][0042]
其中,zi表示z的第i个向量,l表示输入特征的尺寸大小;
[0043]
通过矩阵的重构建立通道关系:z表示成z=[z1,z2,
…
zc],z=[z1,z2,
…
zm,
…
zc], c代表通道数,1≤m≤c,将z进行维度转化并生成u,u的公式如下:
[0044][0045]
之后对u进行转置处理,生成u
t
,u
t
的公式如下:
[0046][0047]
最后将u
t
拉伸至一维,并生成z',z'=[z1,z
m 1
,
…
zc];z特征通道已经重构;
[0048]
通道完成重构之后,z'通过全连接层实现通道关系的映射,并生成特征d,
[0049]
通道重构注意力实现多尺度卷积层权重的动态校准:使用softmax函数计算特征d的通道向量w
i,c
,公式如下:
[0050][0051]
其中,n表示分支数,c表示通道数;将第i个分支的通道向量wi与第i个分支的输出特征oi相乘,公式如下:
[0052][0053]
其中,表示特征逐元素乘法,fi表示加权校准的多尺度卷积层特征。
[0054]
进一步地,所述多分支融合步骤,包括:
[0055]
将加权校准的多尺度卷积层特征进行融合,得到特征分割多尺度动态卷积层的最终输出;公式如下:
[0056][0057]
其中,
⊙
表示逐元素融合,表示逐元素相加,fi表示加权校准的多尺度卷积层特征,y表示特征分割多尺度动态卷积层的输出特征。
[0058]
第二方面,本发明实施例还提供一种齿轮箱小样本故障诊断系统,包括:
[0059]
采集模块,用于采集不同故障类型的齿轮箱振动信号,以及健康状态下的齿轮箱振动信号,并对故障振动信号设置故障类型标签,构建小样本训练数据集;
[0060]
滤波模块,用于对所述小样本训练数据集进行基于奇异值分解的滤波处理;
[0061]
构建模块,用于构建特征分割多尺度动态卷积网络;包括:两个特征分割多尺度动态卷积层,三个最大池化层,一个全连接层,一个dropout层和一个softmax层;
[0062]
训练模块,用于将滤波处理后的小样本训练数据集输入到所述特征分割多尺度动态卷积网络中,故障类型标签作为网络的期望输出,进行训练;
[0063]
诊断模块,用于将需要诊断故障的齿轮箱振动信号进行基于奇异值分解的滤波处理,输入训练后的特征分割多尺度动态卷积网络中,得到对应的齿轮箱小样本故障诊断结果。
[0064]
第三方面,本发明实施例又提供一种齿轮箱小样本故障诊断设备,包括:存储器、处理器及存储于存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述的一种齿轮箱小样本故障诊断方法。
[0065]
与现有技术相比,本发明具有如下有益效果:
[0066]
本发明实施例提供的一种齿轮箱小样本故障诊断方法,使用了奇异值分解对振动信号进行滤波处理,可以有效的降低振动信号的特征复杂度,并去除信号中的噪声成分。并结合了多尺度卷积和注意力机制的优点,不仅可以学习少量的样本中的多尺度特征信息,而且可以自适应调整每个卷积层的权重,具有较强的特征学习能力。不仅可以诊断少量样本条件下的齿轮箱故障,而且具有良好的抗噪性能。
附图说明
[0067]
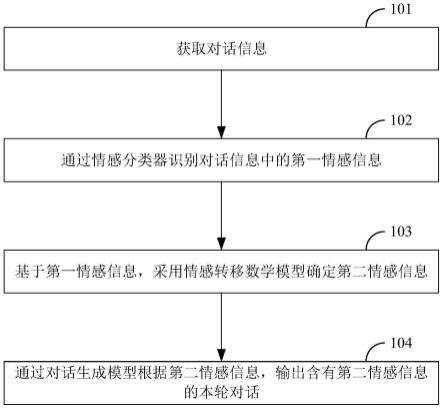
图1为本发明实施例提供的齿轮箱小样本故障诊断方法的流程图;
[0068]
图2为本发明实施例提供的特征分割多尺度动态卷积网络数据处理示意图;
[0069]
图3为本发明实施例提供的特征分割多尺度动态卷积层结构图;
[0070]
图4为本发明实施例提供的齿轮箱系统示意图;
[0071]
图5为本发明实施例提供的多种齿轮故障位置的结构示意图;
[0072]
图6a为ticnn方法在3db噪声环境下的混淆矩阵结果示意图;
[0073]
图6b为rescnn方法在3db噪声环境下的混淆矩阵结果示意图;
[0074]
图6c为msdarn方法在3db噪声环境下的混淆矩阵结果示意图;
[0075]
图6d为elacnn方法在3db噪声环境下的混淆矩阵结果示意图;
[0076]
图6e为本发明实施例提供的齿轮箱小样本故障诊断方法在3db噪声环境下的混淆矩阵结果示意图。
具体实施方式
[0077]
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
[0078]
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅
是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0079]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0080]
实施例1:
[0081]
参照图1所示,本发明提供的一种齿轮箱小样本故障诊断方法,包括以下步骤:
[0082]
s10、采集不同故障类型的齿轮箱振动信号,以及健康状态下的齿轮箱振动信号,并对故障振动信号设置故障类型标签,构建小样本训练数据集;
[0083]
s20、对所述小样本训练数据集进行基于奇异值分解的滤波处理;
[0084]
s30、构建特征分割多尺度动态卷积网络;包括:两个特征分割多尺度动态卷积层,三个最大池化层,一个全连接层,一个dropout层和一个softmax 层;
[0085]
s40、将滤波处理后的小样本训练数据集输入到所述特征分割多尺度动态卷积网络中,故障类型标签作为网络的期望输出,进行训练;
[0086]
s50、将需要诊断故障的齿轮箱振动信号进行基于奇异值分解的滤波处理,输入训练后的特征分割多尺度动态卷积网络中,得到对应的齿轮箱小样本故障诊断结果。
[0087]
该方法不仅可以学习少量的样本中学习的多尺度特征信息,而且可以自适应调整每个卷积层的权重,具有较强的特征学习能力;不仅可以诊断少量样本条件下的齿轮箱故障,而且具有良好的抗噪性能。
[0088]
下面对上述各个步骤进行详细说明本发明的技术方案:
[0089]
s10:采集齿轮箱振动信号样本:使用传感器以相同的采样频率采集不同故障类型的齿轮箱振动信号,以及健康状态下的齿轮箱承振动信号,比如使用2048个采样点作为一个样本,根据每个样本对应的故障类型,设置混合故障类型标签,将采集的振动信号构建为数据集。
[0090]
s20:使用奇异值分解对上述数据集进行基于奇异值分解的滤波降噪处理。奇异值分解处理过程如下:
[0091]
假设一维振动信号为x,x的奇异值矩阵为s:
[0092]
s=[diag(σ1,σ2,
…
,σ
l
),0]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0093]
其中,σ1,σ2,
…
,σ
l
表示奇异值,且均大于0;根据奇异值矩阵,建立奇异值差分谱b,奇异值差分谱b表示为:
[0094]
b=(b1,b2,
…
,b
l-1
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0095]bk
=σ
k 1-σ
k k=1,2,
…
,l-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0096]
其中,bk表示两个连续奇异值的差,b用来建立两个相邻奇异值之间的关系。根据奇异值的分布规律,奇异值通常会发生突变,因此b中会出现多个峰值,最大峰值通常代表着奇异值的最大突变点,该点之后的奇异值代表着振动信号的噪声成分,因此以该点作为奇异值阈值点,将奇异值阈值点后的奇异值进行归零化处理,并进行奇异值分解后的信号
重构,可以实现信号滤波的效果,去除振动信号中的噪声成分。
[0097]
s30:构建特征分割多尺度动态卷积网络:图2为本发明特征分割多尺度动态卷积网络的示意图。如图2所示,特征分割多尺度动态卷积网络包括该网络包括两个特征分割多尺度动态卷积层,三个最大池化层,一个全连接层,一个dropout层和一个softmax层。下面将对每个组成部分进行详细说明。
[0098]
网络的第1层为特征分割多尺度动态卷积层,记为m1。图3是本发明特征分割多尺度动态卷积层的结构示意图。如图3所示,特征分割多尺度动态卷积层由四个组件组成:特征分割、多尺度卷积、通道重构注意力、多分支融合。以下将对这四部分进行介绍:
[0099]
特征分割:传统的多尺度神经网络只有一个原始信号输入,导致多尺度神经网络的不同卷积层只能从一个输入中提取特征,从而限制了多尺度神经网络的性能。针对此问题,本发明建立了特征分割方法,假设输入特征是x1,其中,输入特征的尺寸大小为l1,通道数目为c,r表示实数空间集合;现需要将x1分割为三个不同分支的子特征,分别是子特征x2、 x3、x4,每个子特征对应的尺寸大小分别为l2,l3,l4,其中,l1=l2 l3 l4,因为不同卷积层的卷积核大小不同,需要的子特征尺寸也不同,所以l2≠l3≠l4,并且l2<l3<l4。同时,大量的研究表明:
[0100]
当输入特征的尺寸大小为2的指数幂时,基于深度学习的故障诊断方法能取得更好的结果。因此,本发明将x1的尺寸大小设置为2的指数幂,即l1= l2 l3 l4=2n。此外,根据以上原则,本发明将子特征x2、x3、x4的尺寸大小l2,l3,l4的值设置为2的指数幂。综上,本发明建立了一种特征分割标准,标准如下:
[0101]
l2=2
n-3
,l3=2
n-2
2
n-3
,l4=2
n-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0102]
多尺度卷积:本发明设置了四个卷积层,分别是conv(a1),conv(a2), conv(a3)和conv(a4),四个卷积层对应的输入分别是x1、x2、x3和x4,根据大卷积核适合提取较大尺寸特征,a2<a3<a4<a1,之后xi通过conv(ai)输出多尺度特征oi公式如下:
[0103]
oi=f(wi·
x bi)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0104]
其中,wi和bi分别代表卷积过程中的权重和偏差。f(
·
)表示bn和relu 处理。然后,需要对多尺度卷积的输入进行融合。融合过程首先对o2,o3和o4进行多分支融合,融合后的征尺寸大小为l1,融合公式如下:
[0105]
oc=o2⊙
o3⊙
o4ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0106]
其中,
⊙
代表逐元素融合,o2,o3和o4的特征尺寸大小分别为l2,l3, l4,oc=[o2,o3,o4],然后对oc和o1进行特征融合,公式如下:
[0107][0108]
其中,代表逐元素相加,oc和o1通过逐元素相加生成o,
[0109]
通道重构注意力:本发明构建了一种新的通道重构注意力,并使用通道重构注意力来改善多尺度卷积层特征学习效率。在图2中,通道重构注意力的处理过程如下:
[0110]
首先使用全局平均池化层生成通道向量。假设输入特征为o,经过全局平均池化层后生成通道向量z,公式如下:
[0111][0112]
其中,zi代表z的第i个向量,l代表输入特征的尺寸大小。
[0113]
然后通过矩阵的重构建立通道关系:z可以表示成z=[z1,z2,
…
zc], z=[z1,z2,
…
zm,
…
zc],c代表通道数,1≤m≤c,将z进行维度转化并生成u,u的公式如下:
[0114][0115]
之后对u进行转置处理,生成u
t
,u
t
的公式如下:
[0116][0117]
最后将u
t
拉伸至一维,并生成z',z'=[z1,z
m 1
,
…
zc]。对比z和z',可以看出z特征通道已经重构。
[0118]
通道完成重构之后,z'通过全连接层实现通道关系的映射,并生成特征d,
[0119]
本发明通过通道重构注意力实现多尺度卷积层权重的动态校准,首先,使用softmax函数计算特征d的通道向量w
i,c
,公式如下:
[0120][0121]
其中,n代表分支数,c代表通道数。然后,将第i个分支的通道向量wi与第i个分支的输出特征oi相乘,公式如下:
[0122][0123]
其中,代表特征逐元素乘法,fi代表加权校准的多尺度卷积层特征。
[0124]
多分支融合:本发明将加权校准的多尺度卷积层特征进行融合,并得到特征分割多尺度动态卷积层的最终输出。公式如下:
[0125][0126]
其中,
⊙
代表逐元素融合,代表逐元素相加,fi代表加权校准的多尺度卷积层特征,y代表特征分割多尺度动态卷积层的输出特征。
[0127]
网络的第1层为特征分割多尺度动态卷积层,记为m1,对输出进行多尺度的特征提取操作,并自适应调整不同卷积层的权重。m1的卷积核大小分别为64
×
1,32
×
1,16
×
1,8
×
1,步长为8,正则化方式采用批量正则化,激动函数采用relu函数,通道数为16。
[0128]
第2层最大池化层,记为p1,对第m1层的输出进行最大池化操作,最大池化层p1的池化核大小为2
×
1,步长为2,通道数为16。
[0129]
第3层为特征分割多尺度动态卷积层,记为m2,对输出进行多尺度的特征提取操作,并自适应调整不同卷积层的权重。m2的卷积核大小分别为7
×
1,5
×
1,3
×
1,2
×
1,步长为1,正则化方式采用批量正则化,激动函数采用relu 函数,通道数为64。
[0130]
第4层最大池化层,记为p2,对第m2层的输出进行最大池化操作,最大池化层p1的池化核大小为2
×
1,步长为2,通道数为64。
[0131]
第5层为普通卷积层,记为c1,对第p2层的输出进行普通卷积操作,普通卷积层的卷积核大小为3
×
1,步长为1,正则化方式采用批量正则化,激动函数采用relu函数,通道数为64。
[0132]
第6层最大池化层,记为p3,对第c1层的输出进行最大池化操作,最大池化层p1的池化核大小为2
×
1,步长为2,通道数为64。
[0133]
第7层为全连接层,记为f1,对第p3层的输出进行特征降维操作,全连接层f1参数为100。
[0134]
第8层为dropout层,记为d1,对第f1层的输出进行随机失活操作, dropout层的参数为0.5。
[0135]
第9层为softmax层,对第d1层的输出进行数据估计操作,得到故障诊断结果。
[0136]
s40:训练特征分割多尺度动态卷积网络:将步骤s20中处理得到的振动信号数据集作为特征分割多尺度动态卷积网络的输入,对应的故障状态标签作为期望输出,对特征分割多尺度动态卷积网络进行训练。
[0137]
s50:获取当前齿轮箱振动信号:采用与步骤s10同样的采样频率采集齿轮箱振动信号,并通过步骤s20进行奇异值分解处理,输入到步骤s40中训练好的特征分割多尺度动态卷积网络中,得到当前故障诊断结果。
[0138]
其中,上述特征分割多尺度动态卷积网络每一层的参数如表1所示:
[0139]
表1特征分割多尺度动态卷积网络各层参数表
[0140]
[0141][0142]
举例来说,齿轮箱数据来自康涅狄格大学(uoc)。齿轮箱系统如图4 所示,包括电机、齿轮箱、加速计等。加速计的规格如下:频率范围为 0.5hz-10khz,测量范围为
±
50g,灵敏度为100mv/g。数据由采样频率为20khz 的d空间系统采集。研究人员在输入轴齿轮上制造了八个故障,包括缺齿、齿根裂纹、剥落和五种不同程度的齿削尖(1-5),齿轮故障位置如图5所示。总之,uoc齿轮箱数据集包含8种类型的齿轮箱故障数据和1种类型的健康数据。在这种情况下,其中滑动窗口大小设置为2048,并分别为每个信号数据截取60个样本,训练样本为20个,测试样本为40个,训练集和测试集的比例为1:2。
[0143]
详细的uoc数据集描述如表2所示:
[0144]
表2 uoc数据集描述表
[0145]
[0146][0147]
本次实验验证中所模拟的齿轮箱的不同故障状态。按照步骤s10采集样本,每种故障状态下的样本为20个,健康状态样本为20个,共有180个样本。按照步骤s20对样本进行奇异值分解滤波处理,并将这些样本输入到特征分割多尺度动态卷积网络进行网络训练。
[0148]
训练完成后,按照步骤s50采集样本,每种故障状态下的样本为40个,健康状态样本同样为40个,共有360个样本,并将这些样本按照步骤s20对样本进行奇异值分解滤波处理,之后输入到训练好的特征分割多尺度动态卷积网络,得到小样本条件故障诊断结果。
[0149]
为了说明本发明和对比方法的技术性能,对故障诊断结果采用准确率指标进行评价,计算公式如下:
[0150][0151]
其中,tp代表真阳性样本数,fp代表假阳性样本数,tn代表真阴性样本数,fn代表假阴性样本数。
[0152]
本次实验中设置了四种对比方法,分别是基于一维cnn的ticnn(见文献zhang w,li c,peng g,et al.a deep convolutional neural network with new training methods forbearing fault diagnosis under noisy environment and different working load[j].mechanical systems and signal processing,2018,100:439-453.);
[0153]
基于一维resnet的rescnn(见文献zhang w,li x,ding q.deep residual learning-based fault diagnosis method for rotating machinery[j].isa transactions, 2019,95:295-305.);
[0154]
基于多尺度神经网络的msdarn(见文献liang h,cao j,zhao x. multi-scale dynamic adaptive residual network for fault diagnosis[j].measurement, 2022,188:110397.);
[0155]
基于注意力机制的小样本故障诊断方法elacnn(见文献wang c,sun h, cao x.construction ofthe efficient attention prototypical net based on the time
–ꢀ
frequency characterization of vibration signals under noisy small sample[j]. measurement,2021,179:109412.)。
[0156]
表3本发明方法和不同对比方法的小样本故障诊断性能对比
[0157]
不同方法ticnnrescnnmsdarnelacnn本发明方法准确率96.16%96.55%96.89%98.24%99.72%
[0158]
表3是本发明和不同对比方法的小样本故障诊断性能对比。在表3中,本发明所提出的方法的准确率明显高于其他方法,并且准确率达到99%以上,这表明本发明方法可以在小样本条件下准确诊断出齿轮箱故障类型。此外, ticnn、rescnn、msdarn和elacnn的准确率分别为96.16%、96.55%、96.89%和98.24%,本发明方法的准确率为99.72%,结果表明,本发明方法具有更好的故障诊断能力。
[0159]
表4本发明方法和不同对比方法在噪声环境下的小样本故障诊断性能对比
[0160][0161][0162]
表4是本发明方法和不同对比方法在噪声环境下的小样本故障诊断性能对比。在表4中,噪声环境为高斯白噪声,信噪比分别为3db,6db和9db。表4中可以看出,在三种噪声环境中,本发明的准确度高于其他四种方法,这表明本发明在抗噪声性能方面具有优势。例如,在信噪比为3db的实验中,ticnn的准确率为70.83%,rescnn的准确率为76.94%,msdarn的准确率为85.83%,elacnn的准确率为89.96%,本发明的准确率为96.62%,这表明前四种方法的特征提取能力弱于本发明。综上所述,本发明通过特征分割和自适应调整内部卷积层的权值,可以有效地提取不同尺度振动信号的特征,有助于提高小样本故障诊断方法的抗噪性能。
[0163]
图6a-6e显示了五种方法在3db噪声环境下的混淆矩阵结果,可以看出本发明方法准确识别了大多数故障类型。此外,与其他四种方法相比,本发明方法错误识别的样本更少。上述结果表明,本发明提出的故障诊断方法能够准确识别小样本条件下的齿轮箱故障,而且具有良好的抗噪性能。
[0164]
实施例2:
[0165]
本发明实施例还提供一种齿轮箱小样本故障诊断系统,包括:
[0166]
采集模块,用于采集不同故障类型的齿轮箱振动信号,以及健康状态下的齿轮箱振动信号,并对故障振动信号设置故障类型标签,构建小样本训练数据集;
[0167]
滤波模块,用于对所述小样本训练数据集进行基于奇异值分解的滤波处理;
[0168]
构建模块,用于构建特征分割多尺度动态卷积网络;包括:两个特征分割多尺度动态卷积层,三个最大池化层,一个全连接层,一个dropout层和一个softmax层;
[0169]
训练模块,用于将滤波处理后的小样本训练数据集输入到所述特征分割多尺度动
态卷积网络中,故障类型标签作为网络的期望输出,进行训练;
[0170]
诊断模块,用于将需要诊断故障的齿轮箱振动信号进行基于奇异值分解的滤波处理,输入训练后的特征分割多尺度动态卷积网络中,得到对应的齿轮箱小样本故障诊断结果。
[0171]
基于同一发明构思,本发明实施例还提供了一种齿轮箱小样本故障诊断设备、计算机存储介质,由于这些设备和存储介质所解决问题的原理与前述齿轮箱小样本故障诊断方法相似,因此该设备和存储介质的实施可以参见前述方法的实施,重复之处不再赘述。
[0172]
本发明实施例提供的一种齿轮箱小样本故障诊断设备,包括:存储器、处理器及存储于存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述实施例1的齿轮箱小样本故障诊断方法。
[0173]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。