1.本实用新型涉及机器人应用领域,尤其是涉及一种魔方还原机器人。
背景技术:
2.魔方作为一种经久不衰的益智类游戏,近年来魔方竞速的比赛也越来越多,人工还原魔方的极限速度记录也在不断被挑战与刷新着。伴随着科技的发展,魔方还原机器人也随之出现,魔方还原机器人在给初学者起到教学作用的同时也在不断向着更加快速完成还原的方向前进。
3.目前大多数的三阶魔方还原机器人都是多臂结构或是采用了气动作为驱动源,多臂方案对于魔方的摆放位置要求较高,气动设计也会导致整机使用环境较为受限,并且大部分机器人都存在结构复杂、价格昂贵、末端转动惯量过大等问题。
技术实现要素:
4.针对现有装置的不足,本实用新型提供一种双臂魔方还原机器人,能够模拟人手夹持魔方,并且在保证魔方还原的稳定性的前提下尽可能提高了机器人的魔方还原效率。为三阶魔方教学活动以及魔方还原机器人竞赛提供了解决方案。
5.为实现以上目的,本实用新型通过以下技术方案予以实现,一种双臂魔方还原机器人,其特征在于包括底座、对称安装在底座上的连杆机械臂以及图像处理机构;连杆机械臂包括斜角支撑平台、空心轴电机、旋转轴承座、电磁铁与夹取执行机构;所述斜角支撑平台通过螺栓安装在底座上方;所述空心轴电机通过旋转轴承座驱动夹取执行机构沿旋转轴承座的中轴线完成旋转运动;所述旋转轴承座通过螺栓安装在斜角支撑平台上方,其下方连接空心轴电机,上方连接夹取执行机构,用于支撑整个机械臂的旋转运动;所述电磁铁与夹取执行机构的连杆相连接,并能够带动夹取执行机构完成夹取魔方的动作;所述图像处理机构为安装在底座中心线的上下左右四个方位的颜色识别摄像头,用以识别放置在中间的魔方色块。
6.底座为使用2020标准铝型材搭建的基座框架。
7.所述空心轴电机通过斜角支撑平台固定安装在底座上方。
8.所述所述旋转轴承座包括导电滑环安装转接板、电机安装板、加强垫高板、轴承安装基板、轴承基板、轴承动端基板、连接铝柱以及旋转轴承。直流无刷电机、导电滑环安装转接板、电机安装板、加强垫高板、轴承动端基板与旋转轴承内圈通过连接铝柱与形成夹紧固定。轴承安装基板、轴承基板通过连接铝柱与旋转轴承外圈形成夹紧固定。
9.所述斜角安装平台为45
°
安装于底座之上。
10.所述夹取执行机构包括电磁铁安装基座、连杆及魔方爪片,电磁铁安装基座的内部通过螺栓螺纹连接固定安装电磁铁,基座两侧设有连杆铰点,由连杆铰点固定第一连杆,第一连杆上设有用于给第二连杆连接的铰点,第二连杆与电磁铁输出轴相连,第一连杆末端与魔方爪片相连;所述魔方爪片为楔形块。
11.所述直流无刷电机为空心轴6020直流无刷电机,最大持续扭矩为1.24n
·
m。
12.所述电磁铁型号为kk-1250b,供电电压为直流24v,推拉力为4.5-50n。
13.与现有技术相比,本实用新型的有益效果是:
14.(1)该双臂魔方还原机器人运用连杆实现魔方夹取机构部分的设计,更好模拟了人手夹持魔方的状态,并且夹爪开合范围较广,提高了魔方还原过程的稳定性。
15.(2)采用空心轴电机作为旋转机构驱动,增加大直径旋转轴承作为旋转支撑,相比于传统步进电机通过联轴器与气滑环相连的结构而言,结构刚度更高,整体设计更加紧凑。
16.(3)夹取机构部分,由于使用的电磁铁连杆机构,整体机构的转动惯量较小,在高速旋转的过程当中旋转角度要更加准确,使得在还原魔方的稳定性方面有所保证。
附图说明
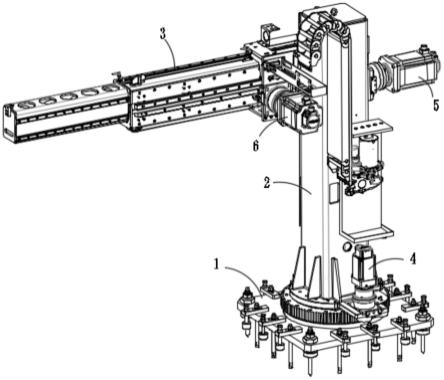
17.图1为本实用新型所述的一种双臂魔方还原机器人的立体示意图
18.图2为本实用新型所述的一种双臂魔方还原机器人的侧视图
19.图3为本实用新型所述的一种双臂魔方还原机器人的旋转支撑机构的爆炸图
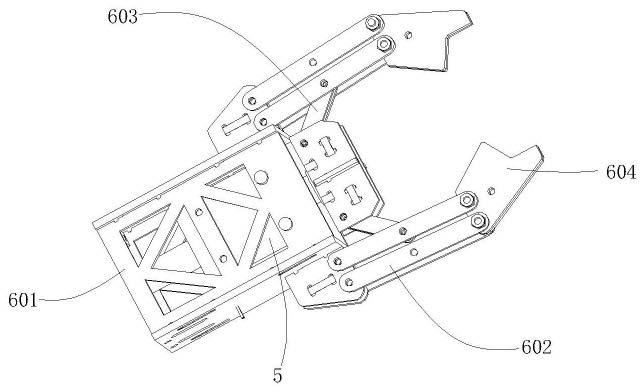
20.图4为本实用新型所述的一种双臂魔方还原机器人机械臂部分的立体示意图
21.图中标记:1.底座2.旋转支撑座3.空心轴电机4.轴承支撑座5.电磁铁6.夹取执行机构601.电磁铁安装基座602.第一连杆603.第二连杆604.魔方爪片7.颜色识别摄像头
具体实施方式
22.这里将详细地对本实用新型进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本技术的一些方面相一致的装置和方法的例子。
23.下面结合附图,对本技术的射击机器人进行详细说明。在不冲突的情况下,下述的实施例及实施方式中的特征可以相互组合。
24.参见图1至4所示,本实用新型方案提供一种双臂魔方还原机器人,适用于魔方还原机器人竞速比赛以及教育用途,包括底座1、对称安装在底座上的连杆机械臂以及图像处理机构;连杆机械臂包括斜角支撑平台2、空心轴电机3、旋转轴承座4、电磁铁5与夹取执行机构6;所述斜角支撑平台2通过螺栓安装在底座1上方;所述空心轴电机3通过旋转轴承座4驱动夹取执行机构6沿旋转轴承座4的中轴线完成旋转运动;所述旋转轴承座4通过螺栓安装在斜角支撑平台2上方,其下方连接空心轴电机3,上方连接夹取执行机构6,用于支撑整个机械臂的旋转运动;所述电磁铁5与夹取执行机构6的连杆相连接,并能够带动夹取执行机构6完成夹取魔方的动作;所述图像处理机构7为安装在底座中心线的上下左右四个方位的颜色识别摄像头,用以识别放置在中间的魔方色块。
25.底座1为使用2020标准铝型材搭建的基座框架。
26.所述空心轴电机3通过斜角支撑平台2固定安装在底座1上方。
27.所述旋转轴承座包括电机安装底板401、导电滑环安装转接板402、电机安装板403、轴承安装基板404、加强垫高板405、深沟球轴承406、导电滑环407、轴承基板408、轴承动端基板409、夹取机构连接板410;直流无刷电机、导电滑环安装转接板、电机安装板、加强
垫高板、轴承动端基板与旋转轴承内圈通过连接铝柱与形成夹紧固定。轴承安装基板、轴承基板通过连接铝柱与旋转轴承外圈形成夹紧固定。
28.所述斜角支撑平台2为45
°
安装于底座之上。
29.所述夹取执行机构6包括电磁铁安装基座601、第一连杆602、第二连杆603及魔方爪片604,电磁铁安装基座601的内部通过螺栓螺纹连接固定安装电磁铁5,电磁铁暗转基座601两侧设有连杆铰点,由连杆铰点固定第一连杆602,第一连杆上602设有用于给第二连杆603连接的铰点,第二连杆603与电磁铁5输出轴相连,第一连杆602末端与魔方爪片604相连;所述魔方爪片604为楔形块。
30.所述直流无刷电机3为空心轴6020直流无刷电机,最大持续扭矩为1.24n
·
m。
31.所述电磁铁5型号为kk-1250b,供电电压为直流24v,推拉力为4.5-50n。
32.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非
33.排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
34.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。