1.本发明属于无人机分类技术领域,特别涉及一种用于小型无人机识别的微多普勒特征分级分析方法。
技术背景
2.小型无人机具有体积小、安全性能良好、机动性突出、价格低廉、易于控制等优点,已被广泛应用于各个领域。然而,小型无人机也会被不法分子利用,进行违法犯罪活动,对国家安全造成威胁。在军事方面,小型无人机很难被探测和识别,可被用于执行战场渗透性监视和侦查任务,亦可用于执行对军事目标进行打击、破坏任务;在民用方面,小型无人机多被用于航拍和摄影,部分航拍爱好者无视法律与安全,在一些政府重要办公场所、机场净空区、人员密集的景区等禁飞区进行非法航拍,不仅扰乱了社会治安,甚至会造成无法挽回的损失。对小型无人机监测和管控的问题日渐成为各国政府和公众安全的新问题。通常小型无人机的飞行高度都在100米以下,飞行速度低于20m/s,是典型的“低慢小”空中目标,这一特征使其很难与自然目标(如飞鸟)以及一些地面车辆、建筑物区分开来,给检测和识别小型无人机带来困难,因此提高小型无人机的检测和识别技术迫在眉睫。
3.目前,对于小型无人机探测技术主要分为4类,即无线电监测、音频探测、光电探测和雷达探测。然而,无线电监测技术需要多站布设才能获得目标的高精度定位信息,且对于关闭遥控和图传信号的“静默”无人机可能失效;由于轻小型无人机旋翼声音微弱,在背景噪声干扰严重时,导致音频探测效果不佳;光电探测容易受到天气和环境的影响,且探测距离十分有限,因此,光电探测往往作为辅助探测设备使用。与其他无人机探测技术不同,雷达探测技术具有诸多优势。一方面,雷达探测技术不受环境变化的影响,在暗光以及雨雾天气的恶劣环境中依然可以正常工作;另一方面,通过多发多收技术,即可实现单个雷达系统对无人机的准确定位。
4.近年来,利用雷达信号处理技术来区分鸟类和小型无人机的方法被提出,这些方法使用时频图或频谱图提取特征进行分类。文献《experimental study on radar micro-doppler signatures of unmanned aerial vehicles》提出利用短时傅立叶变换对小型空中目标回波信号进行处理获得相应的时频图,证实了不同空中目标在时频域中展示出来的微多普勒特征不同,然而,需要进行人工干预才能完成识别任务。
5.中国发明专利公开了一种利用生成对抗网络(gan)对小型无人机分类的方法,然而,网络模型较高的参数量以及计算量使得该分类方法较难部署在认知雷达系统上,另外,基于深度学习的分类方法需要大量的训练数据集,这会导致该方法需要花费较高的训练成本。小型无人机回波信号属于时变非平稳信号,由多个信号叠加而成,机身多普勒信号会对无人机旋翼微多普勒信号造成遮蔽效应,而且旋翼微多普勒信号微弱,容易淹没在噪声中,因此,上述问题会对有效特征提取以及分类识别造成困难。
技术实现要素:
6.本发明的目的在于克服现有雷达系统在低信噪比环境下对小型无人机识别的鲁棒性不足、模型参数量较大以及需要人工干预的问题,提供一种用于小型无人机识别的微多普勒特征分级分析方法。
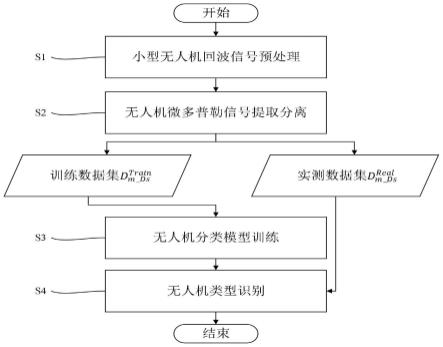
7.一种用于小型无人机识别的微多普勒特征分级分析方法,特征在于,包括以下步骤:
8.s1:对小型无人机回波信号进行预处理,去除无人机的机身多普勒信号分量;
9.s2:分离提取无人机微多普勒信号分量,并构建无人机微动特征集,其包括训练数据集和实测数据集;
10.s3:构建无人机分类模型,利用训练数据集构建模型训练数据集训练无人机分类模型,并建立最优的无人机微动特征组合和保存最优分类模型;
11.s4:根据无人机微动特征组合指导雷达系统从实测数据集中筛选出数据集,输入到最优分类模型中进行无人机类型识别。
12.上述方案中,利用小型无人机回波信号预处理,抑制机身多普勒信号,减少遮蔽效应对微动特征提取的影响,增加雷达系统在远距离识别小型无人机的稳定性;通过bfc评分机制,把旋翼微多普勒信号从噪声中分离提取,提高旋翼微多普勒信号的信噪比;根据先验知识提取有效的微动特征并训练最优的轻量级无人机分类模型,既提升目标的识别精度,又使得模型更容易部署在空中监视雷达系统中。
13.在步骤s1中,所述预处理包括以下步骤:
14.s11:构建小型无人机回波信号的嵌入矩阵h=[s1,s2,...,sk];
[0015]
s12:对矩阵中的左奇异值矩阵hh
t
和右奇异值矩阵h
t
h进行分解;
[0016]
s13:对上述两个特征值分组并构建剩余信号sr(n)的子空间hr;
[0017]
s14:将子空间hr恢复为一维信号序列sr(n)。
[0018]
优选的,在步骤s11中,对小型无人机回波信号s(n)进行分解,构建前向滑窗序列sk=[s(k),s(k 1),...,s(k l-1)]
t
,其中,k=1,2,...,k,k=n-l 1;l为前向滑窗大小;
[0019]
构建嵌入矩阵:
[0020][0021]
在步骤s12中,令方阵a=hh
t
,flag=0;
[0022]
设置c、z及初始化向量γ
0,1
,令c=1,z=1;
[0023]
计算矩阵特征值和特征向量:
[0024]
首先执行:γ
c,z
=aγ
c-1,z
,然后执行:最后执行:
[0025]
若c<c,则令c=c 1并执行步骤s1023;否则,执行步骤s1025;
[0026]
更新方阵:a=a-λ
c,z
γ
c,z
γ
c,zt
[0027]
若z<z,则令z=z 1并执行步骤s1023;否则,执行步骤s1027;
[0028]
若flag≠1,则保存矩阵hh
t
的特征值及特征向量:σ={σ1,σ2,...,σ
l
},p={p1,p2,...,p
l
},令方阵a=h
t
h,flag=1,并执行步骤s1022;否则,执行步骤s1028;
[0029]
保存矩阵h
t
h的特征值及特征向量:δ={δ1,δ2,...,δk},q={q1,q2,...,qk};
[0030]
在步骤s13中,对σ
l
(l=1,2,...,l)分组:若则认为该特征值属于信号sb(n);否则,认为该特征值属于信号sr(n);
[0031]
构建信号sr(n)的子空间:式中,β为属于信号sr(n)的特征值索引;σ
β
为属于信号sr(n)的特征值;p
β
和q
β
分别是p和q中对应的特征向量;
[0032]
在步骤s14中,一维信号序列sr(n)具体为:
[0033][0034]
优选的,在步骤s2中,无人机微多普勒信号分离提取包括以下步骤:
[0035]
s21:模态分解得到j阶独立分量fj(n)。
[0036]
s22:对各阶独立分量进行bfc评分;
[0037]
s23:独立分量分组;把fj(n)分为如下两组:
[0038]
{f
j_up
(n)|g
j_up
≥bf
score threshold
,j_up∈{1,2,...,j}}
[0039]
{f
j_dowm
(n)|g
j_down
<bf
score threshold
,j_down∈{1,2,...,j}}
[0040]
s24:重构微多普勒信号
[0041]
s25:构建微动特征数据集
[0042]
优选的,在步骤s21中,具体为:
[0043]
s211:求出信号sr(n)所有极大值点和极小值点并拟合形成上、下包络线;
[0044]
s212:上、下包络线的平均值记为m(n),然后减去m(n)得到一个新的信号并求出:h(n)=sr(n)-m(n),n=1,2,...,n;
[0045]
s213:若h(n)满足条件:1、h(n)的极值点和过零点的数目差值的绝对值不大于1;2、上、下包络线的平均值为零,则令fj(n)=h(n)并执行步骤s214;否则,执行步骤s211;
[0046]
s214:将fj(n)从sr(n)中分离出来,得到:r(n)=sr(n)-fj(n),n=1,2,...,n
[0047]
s215:若r(n)不为单调函数时,则令sr(n)=r(n)并执行步骤s211,如此重复循环j次得到j阶独立分量;否则,结束模态分解;
[0048]
在步骤s21中,包括以下步骤:
[0049]
s221:令j=1,输入独立分量fj(n);
[0050]
s222:将fj(n)分解为向量集w={w
j,1
,w
j,2
,...,w
j,i
};
[0051]
s223:计算w中各元素的bfc得分
[0052]
s224:计算fj(n)的bfc总得分gj;其中,
[0053]
s225:若j<j,则令j=j 1并执行步骤s221,否则,执行s226;
[0054]
s226:计算得分阈值
[0055]
在步骤s25中,构建微动特征数据集包括以下步骤:
[0056]
s251:将s
m_ds
(n)分解为向量集
[0057]
s252:提取微动特征向量:
[0058][0059]
s253:提取微动特征向量:
[0060][0061]
s254:提取微动特征向量:
[0062][0063]
s255:提取微动特征向量:
[0064][0065]
s256:提取微动特征值:
[0066][0067]
s257:提取微动特征值:
[0068][0069]
s258:构建无人机微动特征库:
[0070]
优选的,在步骤s223中,计算w中各元素的bfc得分函数为:
[0071][0072]
在步骤s258中,构建无人机微动特征库为:
[0073][0074]
优选的,在步骤s3中,包括以下步骤:
[0075]
s31:构建模型训练数据集
[0076]
s32:构建子数据集
[0077]
s3021:将等分为γ组,并对每组数据编上组号γ。
[0078]
s3022:组号不重复地取其中一组数据作为测试集剩余的γ-1组作为训练集测试集与训练集构成子数据集
[0079]
s33:求解优化问题,得到分类模型;
[0080]
s34:若γ小于γ,则令γ=γ 1并执行s32;否则,执行s35;
[0081]
s35:计算模型平均准确率
[0082]
s36:若∈小于e,则令∈=∈ 1并执行s31;否则,执行s37;
[0083]
s37:获得最优模型opt_m及最优特征组合opt_f。
[0084]
优选的,在步骤s32中,构建子数据集具体为:将等分为γ组,并对每组
数据编上组号γ;组号不重复地取其中一组数据作为测试集剩余的γ-1组作为训练集测试集与训练集构成子数据集测试集与训练集构成子数据集
[0085]
优选的,在步骤s4中,包括以下步骤:
[0086]
s41:输入待进行类型识别的数据集s41:输入待进行类型识别的数据集其中,表示由最优特征组合构成的数据;
[0087]
s42:利用opt_m对d
opt
中的样本χ
num
(num=1,2,...,num)进行分类:
[0088][0089]
式中,y
num
∈{ 1,-1}表示样本χ
num
的模型预测类型;
[0090]
s43:若num<num,则num=num 1并执行s42;否则,执行s44。
[0091]
s44:输出无人机预测类型y={y1,y2,...,y
num
}。
[0092]
本发明与现有技术相比,具有以下的有益效果:
[0093]
本发明提供了一种用于小型无人机识别的微多普勒特征分级分析方法,利用小型无人机回波信号预处理,抑制机身多普勒信号,减少遮蔽效应对微动特征提取的影响,增加雷达系统在远距离识别小型无人机的稳定性;通过bfc评分机制,把旋翼微多普勒信号从噪声中分离提取,提高旋翼微多普勒信号的信噪比;根据先验知识提取有效的微动特征并训练最优的轻量级无人机分类模型,既提升目标的识别精度,又使得模型更容易部署在空中监视雷达系统中。
附图说明
[0094]
图1为本发明一种用于小型无人机识别的微多普勒特征分级分析方法的流程图;
[0095]
图2为本发明的小型无人机回波信号预处理的流程图;
[0096]
图3为本发明的对矩阵hh
t
和h
t
h特征值分解的流程图;
[0097]
图4为本发明的无人机微多普勒信号提取分离的流程图;
[0098]
图5为本发明的对各阶独立分量进行bfc评分的流程图;
[0099]
图6为本发明的构建微动特征数据集d
m_ds
的流程图;
[0100]
图7为本发明的无人机分类模型训练的流程图;
[0101]
图8为本发明的无人机类型识别的流程图;
具体实施方式
[0102]
下面结合实施例和附图对本发明做进一步的详细说明。
[0103]
实施例1
[0104]
如图1所示的一种用于小型无人机识别的微多普勒特征分级分析方法,包括以下具体步骤:
[0105]
s1:小型无人机回波信号预处理。对一段长度为n的小型无人机回波信号s(n)作预
处理,去除无人机的机身多普勒信号分量sb(n),其中n=512;
[0106]
s2:无人机微多普勒信号分离提取。分离提取无人机微多普勒信号分量s
m_ds
(n),并构建无人机微动特征集d
m_ds
;
[0107]
s3:无人机分类模型训练。利用训练数据集构建模型训练数据集训练无人机分类模型,并寻找最优的无人机微动特征组合opt_f和保存最优分类模型opt_m;
[0108]
s4:无人机类型识别。根据无人机微动特征d
m_ds
集指导雷达系统从实测数据集中筛选出数据集,输入到最优分类模型opt_m中进行无人机类型识别。
[0109]
实施例2
[0110]
如图2所示,在s1中,小型无人机回波信号预处理的方法,包括以下具体步骤:
[0111]
s11:构建嵌入矩阵h=[s1,s2,...,sk]。具体包括如下分解步骤:
[0112]
s111:对信号s(n)进行分解,构建前向滑窗序列sk=[s(k),s(k 1),...,s(k l-1)]
t
,其中,k=1,2,...,k,k=n-l 1;l为前向滑窗大小。
[0113]
例如,当n=512,l=128时,k=385,前向滑窗序列sk=[s(k),s(k 1),...,s(k 127)]
t
,其中,k=1,2,...,385。
[0114]
s112:构建嵌入矩阵:
[0115][0116]
例如,当n=512,l=128,k=385时,
[0117][0118]
s12:对矩阵hh
t
和h
t
h特征值分解。
[0119]
s12对矩阵hh
t
和h
t
h特征值分解的方法如图3所示,包括以下具体步骤:
[0120]
s121:令方阵a=hh
t
,flag=0。例如,flag=0。
[0121]
s122:设置c、z及初始化向量γ
0,1
,令c=1,z=1。
[0122]
其中,c表示最大迭代轮数;z表示方阵a的维数;γ
0,1
表示初始特征向量;c表示当前迭代轮数;z表示当前特征值索引。例如,c=50,z=2,
[0123]
s123:计算矩阵特征值和特征向量:
[0124]
首先执行:γ
c,z
=aγ
c-1,z
,然后执行:最后执行:
[0125]
例如,当c=1,z=1,时,时,
[0126]
s124:若c<c,则令c=c 1并执行步骤s123;否则,执行步骤s125。
[0127]
s125:更新方阵:a=a-λ
c,z
γ
c,z
γ
c,zt
[0128]
例如,当c=50,z=1,λ
50,1
=4,时,时,
[0129]
s126:若z<z,则令z=z 1并执行步骤s123;否则,执行步骤s127。
[0130]
s127:若flag≠1,则保存矩阵hh
t
的特征值及特征向量:σ={σ1,σ2,...,σ
l
},p={p1,p2,...,p
l
},令方阵a=h
t
h,flag=1,并执行步骤s122;否则,执行步骤s128。例如,若flag=0≠1,则保存矩阵hh
t
的特征值及特征向量:σ={σ1=4,σ2=-1},令令flag=1并执行步骤s122。
[0131]
s1028:保存矩阵h
t
h的特征值及特征向量:δ={δ1,δ2,...,δk},q={q1,q2,...,qk}。例如,保存矩阵h
t
h的特征值及特征向量:δ={δ1=0,δ2=10},
[0132]
s13:特征值分组并构建剩余信号sr(n)的子空间hr。具体包括如下分解步骤:
[0133]
s131:对σ
l
(l=1,2,...,l)分组:若则认为该特征值属于信号sb(n);否则,认为该特征值属于信号sr(n)。
[0134]
例如,当l=128,τ=0.98,时,若l=3≤5,则认为特征值σ3属于信号sb(n);若l=9>5,则认为特征值σ9属于信号sr(n)。
[0135]
s132:构建信号sr(n)的子空间:式中,β为属于信号sr(n)的特征值索引;σ
β
为属于信号sr(n)的特征值;p
β
和q
β
分别是p和q中对应的特征向量。
[0136]
例如,当l=128,ω=5时,信号sr(n)的子空间为:
[0137]
s14:将子空间hr恢复为一维信号序列sr(n)。
[0138][0139]
例如,当l=128,k=385,n=512,时,
[0140][0141]
实施例3
[0142]
s2无人机微多普勒信号提取分离方法如图4所示,包括以下具体步骤:
[0143]
s21:模态分解得到j阶独立分量fj(n)。具体包括如下分解步骤:
[0144]
s211:求出信号sr(n)所有极大值点和极小值点并拟合形成上、下包络线。
[0145]
s212:上、下包络线的平均值记为m(n),然后减去m(n)得到一个新的信号并求出:h(n)=sr(n)-m(n),n=1,2,...,n
[0146]
s213:若h(n)满足条件:1、h(n)的极值点和过零点的数目差值的绝对值不大于1;2、上、下包络线的平均值为0,则令fj(n)=h(n)并执行步骤s214;否则,执行步骤s211。
[0147]
s214:将fj(n)从sr(n)中分离出来,得到:r(n)=sr(n)-fj(n),n=1,2,...,n
[0148]
s215:若r(n)不为单调函数时,则令sr(n)=r(n)并执行步骤s211,如此重复循环j次得到j阶独立分量;否则,结束模态分解。
[0149]
s22对各阶独立分量进行bfc评分方法如图5所示,包括以下具体步骤:
[0150]
s221:令j=1,输入独立分量fj(n)。
[0151]
s222:将fj(n)分解为向量集w={w
j,1
,w
j,2
,...,w
j,i
}。
[0152]
对信号fj(n)进行分解,构建前向滑窗序列w
j,i
,其向量形式可表示为:
[0153]wj,i
=[fj(1 (i-1)
×
step),fj(2 (i-1)
×
step),...,fj(wlen (i-1)
×
step)]
t
,其中,j=1,2,...,j;i=1,2,...,i,wlen为前向滑窗大小;step为步长。
[0154]
例如,当n=512,wlen=64,step=2,j=13时,i=225,w
j,i
=[fj(2
×
i-1),fj(2
×
i),...,fj(2
×
i 62)]
t
,其中,i=1,2,...,225,j=1,2,...,13。
[0155]
s223:计算w中各元素的bfc得分
[0156][0157]
式中,为前向滑窗序列w
j,i
的均值;ρ为得分惩罚因子;z(*)为求过零点运算。
[0158]
例如,当i=225,j=13,wlen=64,j=1,p=0.5时,w
1,i
=[f1(2
×
i-1),f1(2
×
i),...,f1(2
×
i 62)]
t
,,,
[0159]
s224:计算fj(n)的bfc总得分gj。其中,
[0160]
例如,当i=225,j=13,j=1时,
[0161]
s225:若j<j,则令j=j 1并执行步骤s221;否则,执行s226。
[0162]
s226:计算得分阈值
[0163]
例如,当j=13时,
[0164]
s23:独立分量分组。把fj(n)分为如下两组:
[0165]
{f
j_up
(n)|g
j_up
≥bf
score threshold
,j_up∈{1,2,...,j}}
[0166]
{f
j_dowm
(n)|g
j_down
<bf
score threshold
,j_down∈{1,2,...,j}}
[0167]
例如,当j=13时,若j=1,g1≥bf
score threshold
,则f1(n)∈{f
j_up
(n)|g
j_up
≥bf
score threshold
,j_up∈{1,2,...,13}};若j=2,g2<bf
score threshold
,则f2(n)∈{f
j_down
(n)|g
j_down
<bf
score threshold
,j_down∈{1,2,...,13}}。
[0168]
s24:重构微多普勒信号
[0169]
s25:构建微动特征数据集
[0170]
其中,表示从离线获取的s
m_ds
(n)中提取的微动特征构成的训练数据集;表示由实时获取的s
m_ds
(n)中提取的微动特征构成的实测数据集。
[0171]
s25构建微动特征数据集d
m_ds
方法如图6所示,包括以下具体步骤:
[0172]
s251:将s
m_ds
(n)分解为向量集
[0173]
对信号s
m_ds
(n)进行分解,构建前向滑窗序列其向量形式可表示为:其向量形式可表示为:其向量形式可表示为:其中,i=1,2,...,i,wlen为前向滑窗大小;step为步长。
[0174]
例如,当n=512,wlen=64,step=2时,i=225,例如,当n=512,wlen=64,step=2时,i=225,其中,i=1,2,...,225。
[0175]
s252:提取微动特征向量:
[0176][0177]
式中,
[0178]
例如,当时,时,
[0179]
s253:提取微动特征向量:
[0180][0181]
例如,当例如,当
[0182]
s254:提取微动特征向量:
[0183][0184]
例如,当时,
[0185]
s255:提取微动特征向量:
[0186][0187]
式中,表示返回中最大值运算。
[0188]
例如,当时,
[0189]
s256:提取微动特征值:
[0190][0191]
例如,当时,
[0192]
s257:提取微动特征值:
[0193][0194]
例如,当s(n)=[1,2,1,3,2,4],sr(n)=[-1,0,1,2,1,3],s
m_ds
(n)=[0,1,1,2,0,1]时,ed=11-7=4。
[0195]
s258:构建无人机微动特征库:
[0196]
实施例4
[0197]
s3无人机分类模型训练方法如图7所示,包括以下具体步骤:
[0198]
s31:构建模型训练数据集
[0199]
其中,μ表示从中不重复地选出用于训练模型的特征向量或特征值的个数;num=1,2,...,num,num表示中的样本总数;∈=1,2,...,e,e表示从中不重复地选取μ个特征向量或特征值构成组合的所有组合的总数。
[0200]
例如,当μ=4,∈=1时,∈=1时,
[0201]
s32:构建子数据集具体包括如下分解步骤:
[0202]
s321:将等分为γ组,并对每组数据编上组号γ。例如,γ=5。
[0203]
s322:不重复地取其中第γ组数据作为测试集剩余的γ-1组作为训练集
测试集与训练集构成子数据集
[0204]
例如,当γ=1,∈=1时,
[0205]
s33:求解优化问题,得到分类模型。
[0206]
优化问题可由下式表示:
[0207][0208]
式中,α={α
m_i
,α
m_j
}表示约束条件下添加的拉格朗日乘子;y={y
m_i
,y
m_j
}表示中训练样本的真实标签;χ={χ
m_i
,χ
m_j
}表示中的训练样本;表示中训练样本总数;κ(*,*)表示核函数;c表示模型惩罚因子。
[0209]
分类模型可由下式表示:
[0210][0211]
式中,model
γ,∈
(χ
test
)表示分类模型;χ
test
表示中的测试样本;b表示偏移项。
[0212]
例如,当γ=1,∈=1,γ=5,num=100,例如,当γ=1,∈=1,γ=5,num=100,c=10,b=3时,m=80,y∈{-1,1},1,1},
[0213]
优化问题可由下式表示:
[0214][0215]
分类模型可由下式表示:
[0216][0217]
s34:若γ小于γ,则令γ=γ 1并执行s302;否则,执行s35。
[0218]
s35:计算模型平均准确率
[0219]
其中,式中,式中,表示第m_test个测试样本模型预测标签;表示第m_test个测试样本真实标签。
[0220]
例如,当γ=1,∈=1,γ=5,num=100。若则df=0;若则df=1。则df=1。
[0221]
s36:若∈小于e,则令∈=∈ 1并执行s31;否则,执行s37。
[0222]
s37:获得最优模型opt_m及最优特征组合opt_f。
[0223]
其中,其中,其中,表示构成opt_m训练集的特征。
[0224]
例如,当ζ=1,ξ=2,时,opt_m=model
1,2
(χ
test
),
[0225]
实施例5
[0226]
s4无人机类型识别方法如图8所示,包括以下具体步骤:
[0227]
s41:输入待进行类型识别的数据集s41:输入待进行类型识别的数据集
[0228]
其中,表示由最优特征组合构成的数据。
[0229]
例如,当num=50时,num=50时,
[0230]
s42:利用opt_m对d
opt
中的样本χ
num
(num=1,2,...,num)进行分类:
[0231][0232]
式中,y
num
∈{ 1,-1}表示样本χ
num
的模型预测类型。
[0233]
例如,当b=3时,χ
num
∈d
opt
,若则y
num
= 1;若则y
num
=-1。
[0234]
s43:若num<num,则num=num 1并执行s42;否则,执行s44。
[0235]
s44:输出无人机预测类型y={y1,y2,...,y
num
}。例如,y={y1=1,y2=-1,...,y
num
=1}。
[0236]
本发明利用小型无人机回波信号预处理方法,抑制机身多普勒信号,减少遮蔽效应对微动特征提取的影响,增加雷达系统在远距离识别小型无人机的稳定性;本发明通过bfc评分机制,把旋翼微多普勒信号从噪声中分离提取,提高旋翼微多普勒信号的信噪比;本发明根据先验知识提取有效的微动特征并训练最优的轻量级无人机分类模型,既提升目
标的识别精度,又使得模型更容易部署在空中监视雷达系统中。
[0237]
上述为本发明较佳的实施方式,但本发明的实施方式并不受上述内容的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。