技术特征:
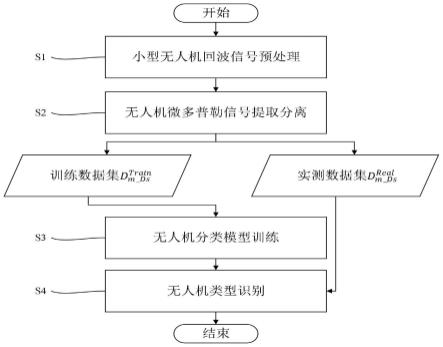
1.一种用于小型无人机识别的微多普勒特征分级分析方法,特征在于,包括以下步骤:s1:对小型无人机回波信号进行预处理,去除无人机的机身多普勒信号分量;s2:分离提取无人机微多普勒信号分量,并构建无人机微动特征集,其包括训练数据集和实测数据集;s3:构建无人机分类模型,利用训练数据集构建模型训练数据集训练无人机分类模型,并建立最优的无人机微动特征组合和保存最优分类模型;s4:根据无人机微动特征组合指导雷达系统从实测数据集中筛选出数据集,输入到最优分类模型中进行无人机类型识别。2.根据权利要求1所述的一种用于小型无人机识别的微多普勒特征分级分析方法,其特征在于,在步骤s1中,所述预处理包括以下步骤:s11:构建小型无人机回波信号的嵌入矩阵h=[s1,s2,
…
,s
k
];s12:对矩阵中的左奇异值矩阵hh
t
和右奇异值矩阵h
t
h进行分解;s13:对上述两个特征值分组并构建剩余信号s
r
(n)的子空间h
r
;s14:将子空间h
r
恢复为一维信号序列s
r
(n)。3.根据权利要求2所述的一种用于小型无人机识别的微多普勒特征分级分析方法,其特征在于,在步骤s11中,对小型无人机回波信号s(n)进行分解,构建前向滑窗序列s
k
=[s(k),s(k 1),
…
,s(k l-1)]
t
,其中,k=1,2,
…
,k,k=n-l 1;l为前向滑窗大小;构建嵌入矩阵:在步骤s12中,令方阵a=hh
t
,flag=0;设置c、z及初始化向量υ
0,1
,令c=1,z=1;计算矩阵特征值和特征向量:首先执行:υ
c,z
=aυ
c-1,z
,然后执行:最后执行:若c<c,则令c=c 1并执行步骤s1023;否则,执行步骤s1025;更新方阵:a=a-λ
c,z
υ
c,z
υ
c,zt
若z<z,则令z=z 1并执行步骤s1023;否则,执行步骤s1027;若flag≠1,则保存矩阵hh
t
的特征值及特征向量:σ={σ1,σ2,
…
,σ
l
},p={p1,p2,
…
,p
l
},令方阵a=h
t
h,flag=1,并执行步骤s1022;否则,执行步骤s1028;保存矩阵h
t
h的特征值及特征向量:δ={δ1,δ2,
…
,δ
k
},q={q1,q2,
…
,q
k
};在步骤s13中,对σ
l
(l=1,2,
…
,l)分组:若则认为该特征值属于信号s
b
(n);否则,认为该特征值属于信号s
r
(n);构建信号s
r
(n)的子空间:式中,β为属于信号s
r
(n)的特征值索引;σ
β
为属于信号s
r
(n)的特征值;p
β
和q
β
分别是p和q中对应的特征向量;在步骤s14中,一维信号序列s
r
(n)具体为:
4.根据权利要求3所述的一种用于小型无人机识别的微多普勒特征分级分析方法,其特征在于,在步骤s2中,无人机微多普勒信号分离提取包括以下步骤:s21:模态分解得到j阶独立分量f
j
(n);s22:对各阶独立分量进行bfc评分;s23:独立分量分组;把f
j
(n)分为如下两组:{f
j_up
(n)|g
j_up
≥bf
score threshold
,j_up∈{1,2,
…
,j}}{f
j_dowm
(n)|g
j_down
<bf
score threshold
,j_down∈{1,2,
…
,j}}s24:重构微多普勒信号s
m_ds
(n)=∑f
j_up
(n)。s25:构建微动特征数据集5.根据权利要求4所述的一种用于小型无人机识别的微多普勒特征分级分析方法,其特征在于,在步骤s21中,具体为:s211:求出信号s
r
(n)所有极大值点和极小值点并拟合形成上、下包络线;s212:上、下包络线的平均值记为m(n),然后减去m(n)得到一个新的信号并求出:h(n)=s
r
(n)-m(n),n=1,2,
…
,n;s213:若h(n)满足条件:1、h(n)的极值点和过零点的数目差值的绝对值不大于1;2、上、下包络线的平均值为零,则令f
j
(n)=h(n)并执行步骤s214;否则,执行步骤s211;s214:将f
j
(n)从s
r
(n)中分离出来,得到:r(n)=s
r
(n)-f
j
(n),n=1,2,
…
,ns215:若r(n)不为单调函数时,则令s
r
(n)=r(n)并执行步骤s211,如此重复循环j次得到j阶独立分量;否则,结束模态分解;在步骤s22中,包括以下步骤:s221:令j=1,输入独立分量f
j
(n);s222:将f
j
(n)分解为向量集w={w
j,1
,w
j,2
,
…
,w
j,i
};s223:计算w中各元素的bfc得分s224:计算f(n)的bfc总得分g
j
;其中,s225:若j<j,则令j=j 1并执行步骤s221,否则,执行s226;s226:计算得分阈值在步骤s25中,构建微动特征数据集包括以下步骤:s251:将s
m_ds
(n)分解为向量集s252:提取微动特征向量:s252:提取微动特征向量:s253:提取微动特征向量:
s254:提取微动特征向量:s254:提取微动特征向量:s255:提取微动特征向量:s255:提取微动特征向量:s256:提取微动特征值:s256:提取微动特征值:s257:提取微动特征值:s257:提取微动特征值:s258:构建无人机微动特征库。6.根据权利要求5所述的一种用于小型无人机识别的微多普勒特征分级分析方法,其特征在于,在步骤s223中,计算w中各元素的bfc得分函数为:7.根据权利要求6所述的一种用于小型无人机识别的微多普勒特征分级分析方法,其特征在于,在步骤s258中,无人机微动特征库为:8.根据权利要求7所述的一种用于小型无人机识别的微多普勒特征分级分析方法,其特征在于,在步骤s3中,包括以下步骤:s31:构建模型训练数据集s32:构建子数据集s3021:将等分为γ组,并对每组数据编上组号γ。s3022:组号不重复地取其中一组数据作为测试集剩余的γ-1组作为训练集测试集与训练集构成子数据集s33:求解优化问题,得到分类模型;s34:若γ小于γ,则令γ=γ 1并执行s32;否则,执行s35;s35:计算模型平均准确率s36:若∈小于e,则令∈=∈ 1并执行s31;否则,执行s37;s37:获得最优模型opt_m及最优特征组合opt_f。9.根据权利要求8所述的一种用于小型无人机识别的微多普勒特征分级分析方法,其
特征在于,在步骤s32中,构建子数据集具体为:将等分为γ组,并对每组数据编上组号γ;组号不重复地取其中一组数据作为测试集剩余的γ-1组作为训练集测试集与训练集构成子数据集10.根据权利要求9所述的一种用于小型无人机识别的微多普勒特征分级分析方法,其特征在于,在步骤s4中,包括以下步骤:s41:输入待进行类型识别的数据集s41:输入待进行类型识别的数据集其中,表示由最优特征组合构成的数据;s42:利用opt_m对d
opt
中的样本χ
num
(num=1,2,
…
,num)进行分类:式中,y
num
∈{ 1,-1}表示样本χ
num
的模型预测类型;s43:若num<num,则num=num 1并执行s42;否则,执行s44。s44:输出无人机预测类型y={y1,y2,
…
,y
num
}。
技术总结
本发明公开了一种用于小型无人机识别的微多普勒特征分级分析方法,包括以下步骤:对小型无人机回波信号进行预处理,去除无人机的机身多普勒信号分量;分离提取无人机微多普勒信号分量,并构建无人机微动特征集,其包括训练数据集和实测数据集;构建无人机分类模型,利用训练数据集构建模型训练数据集训练无人机分类模型,并建立最优的无人机微动特征组合和保存最优分类模型;根据无人机微动特征组合指导雷达系统从实测数据集中筛选出数据集,输入到最优分类模型中进行无人机类型识别;利用无人机回波信号预处理,抑制机身多普勒信号,减少遮蔽效应的影响,根据先验知识提取有效的微动特征并训练最优的轻量级无人机分类模型,提升目标的识别精度。提升目标的识别精度。提升目标的识别精度。
技术研发人员:刘震宇 伍卓丰 马崇润 刘昊明 李光平
受保护的技术使用者:广东工业大学
技术研发日:2022.08.31
技术公布日:2022/12/12
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。