技术特征:
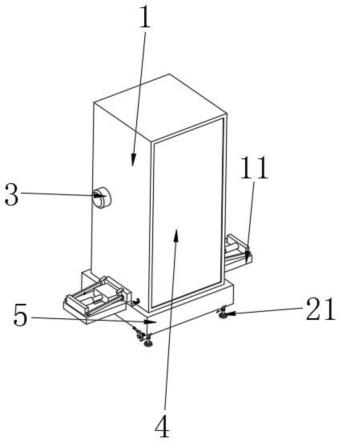
1.高精度多路同步数据采集装置,包括采集箱(1)、位于采集箱(1)内部的采集仪(2)和固定在采集仪(2)两侧的探头(3),其特征在于:所述探头(3)的一端贯穿采集箱(1)并延伸至采集箱(1)的外部,所述采集箱(1)的表面转动连接有箱门(4),且箱门(4)嵌入至采集箱(1)的内部,所述采集箱(1)的底部卡接有底座(5),所述底座(5)的顶部开设有卡槽(6),所述采集箱(1)的底部向下延伸形成框架(7),所述卡槽(6)和框架(7)的内表面之间卡接有卡座(8),所述箱门(4)上设置有控制卡座(8)上下运动的控制机构(9);所述控制机构(9)包括固定在箱门(4)一侧的折架(91),所述折架(91)的顶部通过机架(92)固定有驱动电机(93),所述驱动电机(93)输出轴的一端通过联轴器固定有转轴(94),所述转轴(94)的底端贯穿折架(91)并在表面固定有侧臂(95),所述折架(91)的表面开设有t型槽(96),且t型槽(96)的内表面滑动有t型座(97),所述t型座(97)的内表面转动有衔接杆(98),且衔接杆(98)的顶端与侧臂(95)的内表面转动,所述t型座(97)的底部固定有套杆(910),所述套杆(910)的内表面贯穿滑动有内置杆(911),且内置杆(911)的底端与卡座(8)的顶部固定,所述卡座(8)上设置有限位组件(99)。2.根据权利要求1所述的高精度多路同步数据采集装置,其特征在于:所述限位组件(99)包括贯穿开设在卡座(8)内部的通槽(991),所述通槽(991)内壁的两侧均贯穿滑动有梯形块(992),两个所述梯形块(992)之间通过第一弹簧(993)固定,且梯形块(992)的斜面朝上,所述梯形块(992)的两侧均固定有限位块(994),所述通槽(991)内壁的两侧均开设有限位槽(995),且限位槽(995)的内表面与限位块(994)的外表面滑动,所述内置杆(911)的外部套设有第二弹簧(996),且第二弹簧(996)的底端与卡座(8)的顶部固定,所述采集箱(1)设置有挤压梯形块(992)的推杆组件(997)。3.根据权利要求2所述的高精度多路同步数据采集装置,其特征在于:所述推杆组件(997)包括贯穿滑动在采集箱(1)上的推杆(997-1),所述推杆(997-1)的外表面套设有第三弹簧(997-2),且第三弹簧(997-2)的一端与采集箱(1)的一侧固定,所述推杆(997-1)的一端转动有把手(997-3),且把手(997-3)表面的一侧固定有延伸板(997-4),所述采集箱(1)的一侧固定有卡合板(997-5),且延伸板(997-4)的外表面与卡合板(997-5)的内表面卡合。4.根据权利要求1所述的高精度多路同步数据采集装置,其特征在于:所述采集箱(1)的两侧下方均固定有第一凸起座(10),所述底座(5)的两侧均固定有第二凸起座(11),所述第二凸起座(11)的顶部一侧固定有竖座(12),所述竖座(12)的两侧均转动有连接板(13),所述竖座(12)的一侧固定有液压杆(14)。5.根据权利要求4所述的高精度多路同步数据采集装置,其特征在于:所述液压杆(14)的输出端固定有横座(15),所述横座(15)的两侧均转动有夹板(16),且夹板(16)的一侧与连接板(13)的一侧转动,所述夹板(16)的表面可与第一凸起座(10)的顶部贴合。6.根据权利要求5所述的高精度多路同步数据采集装置,其特征在于:所述横座(15)的底部固定有定位块(17),所述第二凸起座(11)的顶部开设有定位槽(18),且定位槽(18)的内表面与定位块(17)的外表面滑动。7.根据权利要求1所述的高精度多路同步数据采集装置,其特征在于:所述采集箱(1)内壁底部的两侧均固定有弹性橡胶块(19),两个所述弹性橡胶块(19)的一侧均与箱门(4)的一侧挤压。8.根据权利要求1所述的高精度多路同步数据采集装置及采集方法,其特征在于:所述
底座(5)底部的两侧均固定有滚轮(20),所述底座(5)的底部且位于滚轮(20)的一侧固定有液压支撑脚(21)。9.一种如权利要求3所述的高精度多路同步数据采集方法,其特征在于:具体包括以下步骤:s1、首先启动驱动电机(93),利用驱动电机(93)带动转轴(94)转动,转轴(94)转动进而带动侧臂(95)转动,侧臂(95)转动使得衔接杆(98)转动的过程中被牵引,然后利用衔接杆(98)带动t型座(97)在t型槽(96)内上下往复滑动,t型座(97)上下往复移动的过程中,使得套杆(910)跟随t型座(97)同步上下往复移动,在套杆(910)的作用下再带动内置杆(911)向上运动,内置杆(911)向上运动使得卡座(8)脱离卡槽(6)和框架(7),当内置杆(911)向下运动时,会在梯形块(992)直角边的作用下被限位,此时卡座(8)被卡在框架(7)上,在第二弹簧(996)的作用下内置杆(911)沿着套杆(910)滑动后停止,此时箱门(4)被打开,并且不会因为驱动电机(93)的转动过程中被锁住,此时关闭驱动电机(93),并且将侧臂(95)转动至最远距离即可;s2、当对采集仪(2)内的数据信息取出后需要关闭箱门(4)时,此时只需向一侧挤压把手(997-3),利用把手(997-3)带动推杆(997-1)向一侧运动,推杆(997-1)向一侧运动使得第三弹簧(997-2)被压缩,并且推杆(997-1)会向内侧挤压梯形块(992),此时梯形块(992)沿着通槽(991)向一侧滑动,同时限位块(994)在限位槽(995)内滑动,当把手(997-3)上的延伸板(997-4)运动至卡合板(997-5)处时,此时转动把手(997-3)对延伸板(997-4)进行固定,两侧同步操作后,第一弹簧(993)被压缩,此时梯形块(992)在第二弹簧(996)的弹力作用下重新卡进卡槽(6)和框架(7)内即可,再将两侧的把手(997-3)恢复至初始状态。10.根据权利要求9所述的高精度多路同步数据采集方法,其特征在于:所述s1中利用驱动电机(93)带动转轴(94)转动,驱动电机(93)可通过遥控的方式进行启动和关闭。
技术总结
本发明公开了高精度多路同步数据采集装置及采集方法,包括采集箱、位于采集箱内部的采集仪和固定在采集仪两侧的探头,所述探头的一端贯穿采集箱并延伸至采集箱的外部,所述采集箱的表面转动连接有箱门,且箱门嵌入至采集箱的内部,本发明涉及数据采集技术领域。该高精度多路同步数据采集装置及采集方法,通过在卡槽和框架的内表面之间卡接有卡座,箱门上设置有控制卡座上下运动的控制机构,利用卡座向上运动时跟随内置杆同步向上,而卡座向下运动时被限位块卡在框架上,配合推杆组件恢复至初始位置,避免打开箱门的过程中无法精准控制电机的转动圈数导致箱门被二次锁死的问题,同时还能避免从外部打开箱门,减少数据被盗的可能性。性。性。
技术研发人员:钱飞 唐维
受保护的技术使用者:杭州仁牧科技有限公司
技术研发日:2022.08.12
技术公布日:2022/12/12
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。