1.本公开属于物联网技术领域,具体涉及一种食材处理装置及方法、控制装置。
背景技术:
2.人们在日常生活中,经常会用道具切割蔬菜进行烹饪,由于,人工切菜费时费力,切出的蔬菜大小厚薄不均,而且很容易切到手,带来不安全因素。现在市面上存在的自动食材处理装置,通常采用旋转式和直线式,但是上述的自动食材处理装置无法实现远程控制,用户与自动食材处理装置无法实现信息的交互。
3.现有技术中,提供了一种多功能食材处理装置,包括机架和电动机,电动机设于机架下方,机架上方一侧为软菜类食材处理装置构,另一侧为硬菜类食材处理装置构,电动机通过电机轮和三角带带动皮带轮i和皮带轮ii,皮带轮ⅰ采用超越离合器带动软菜类食材处理装置构工作,皮带轮ⅱ带动硬菜类食材处理装置构工作;当电动机逆时针转动时硬菜类食材处理装置构和软菜类食材处理装置构同时工作,顺时针转动时仅有硬菜类食材处理装置构工作。本发明为硬菜切丝、切片与软菜切断复合一体机,利用超越离合器机构实现电动机正反转时食材处理装置不同的运转状态,增加了输送带与压菜带的耐用性与安全性。
4.但是上述多功能食材处理装置无法实现智能联网,人机交互能力差,并且反复切割,需要耗费较长的时间,同时耗费较多的电能,尤其是在切割大量的蔬菜时,耗电量较为明显。
技术实现要素:
5.本公开针对现有技术中存在的上述不足,提供一种食材处理装置及方法、控制装置。
6.作为本公开的第一个方面,提供一种食材处理装置,包括控制装置、上料装置和切割装置,所述上料装置包括料斗和传送组件,所述传送组件与所述料斗相连,所述切割装置包括容纳结构和与所述容纳结构相连接的切割组件,
7.所述料斗用于在所述传送组件的带动下,运动到所述容纳结构的开口处,以使料斗中的蔬菜能够落入所述容纳结构中;
8.所述切割组件,用于对所述容纳结构中的蔬菜进行切割;
9.所述控制装置,用于根据操作指令启动所述传送组件和所述切割组件。
10.优选地,所述传送组件包括第一电机和定滑轮结构,所述定滑轮结构包括滑轮、绳子和第一固定杆,所述滑轮套接在所述第一固定杆上,所述绳子套接在所述滑轮上,所述第一电机与所述绳子的一端连接,所述绳子的另一端与所述料斗连接,
11.所述第一电机用于接收到所述控制装置发送的第一启动指令后,卷绕所述绳子。
12.优选地,所述切割组件包括第二电机、第一刀片组件、第二刀片组件、传感器和侧壁,所述第一刀片组件与所述第二电机连接,所述第一刀片组件与所述第二刀片组件相互交错设置,所述传感器设置在与所述第一刀片组件初始状态下的位置水平的侧壁上,
13.所述第二电机,用于接收到所述控制装置的第二启动指令后,带动所述第一刀片组件转动;接收控制装置的停止指令,控制第一刀片组停止转动;
14.所述传感器,用于在所述第一刀片组件旋转一周之后向所述控制装置发送信号,以使所述控制装置向第二电机发送停止指令。
15.优选地,所述容纳结构为所述第一刀片组件、所述第二刀片组件与所述侧壁生成的空间。
16.优选地,所述食材处理装置还包括存放盒,所述存放盒位于所述切割装置的下料口处的下方位置,所述存放盒,用于盛放从下料口下落的片状蔬菜或丝状蔬菜或丁状蔬菜。
17.优选地,所述控制装置,还用于启动所述切割组件一次或两次之后,根据所述操作指令控制所述传送组件启动以使所述料斗运动到所述切割装置的下料口处,以使所述料斗能够接收所述切割组件切割成的片状蔬菜或丝状蔬菜;再控制所述传送组件启动以使携带所述片状蔬菜或丝状蔬菜的料斗运动到所述容纳结构的开口处。
18.作为本公开的第二个方面,提供一种食材处理方法,应用于第一方面提供的食材处理装置,所述方法包括:
19.接收用户的操作指令;
20.根据所述操作指令控制所述传送组件启动以使携带蔬菜的所述料斗运动至所述容纳结构的开口处,使所述蔬菜从所述料斗落入所述容纳结构中,并控制所述切割组件切割所述容纳结构中的蔬菜。
21.优选地,所述控制所述切割组件切割所述容纳结构中的蔬菜之后,还包括:
22.在确定出启动所述切割组件一次或两次之后,根据所述操作指令控制所述传送组件启动以使所述料斗运动到所述切割装置的下料口处,以使所述料斗能够接收所述切割组件切割成的片状蔬菜或丝状蔬菜;
23.控制所述传送组件启动以使携带所述片状蔬菜或所述丝状蔬菜的料斗运动到所述容纳结构的开口处,使所述片状蔬菜或所述丝状蔬菜从所述料斗落入所述容纳结构中,并控制所述切割组件切割所述容纳结构中的片状蔬菜或丝状蔬菜。
24.作为本公开的第三个方面,提供一种控制装置,包括:
25.接收模块,用于接收用户的操作指令;
26.第一控制模块,用于根据所述操作指令控制所述传送组件启动以使携带蔬菜的所述料斗运动至所述容纳结构的开口处,使所述蔬菜从所述料斗落入所述容纳结构中,并控制所述切割组件切割所述容纳结构中的蔬菜。
27.优选地,还包括:
28.第二控制模块,用于在确定出启动所述切割组件一次或两次之后,根据所述操作指令控制所述传送组件启动以使所述料斗运动到所述切割装置的下料口处,以使所述料斗能够接收切割成的片状蔬菜或丝状蔬菜;
29.第三控制模块,用于控制所述传送组件启动以使携带所述片状蔬菜或所述丝状蔬菜的料斗运动到所述容纳结构的开口处,使所述片状蔬菜或所述丝状蔬菜从所述料斗落入所述容纳结构中,并控制所述切割组件切割所述容纳结构中的片状蔬菜或丝状蔬菜。
30.本公开实施例提供的食材处理装置,通过控制装置能够与用户实现信息的交互,可以实现智能联网,便于人们远程进行控制。切割装置和上料装置在控制装置的控制下,一
次可切割大量的食材,不需要耗费较长的时间,并且不会耗费太多的电能。
附图说明
31.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
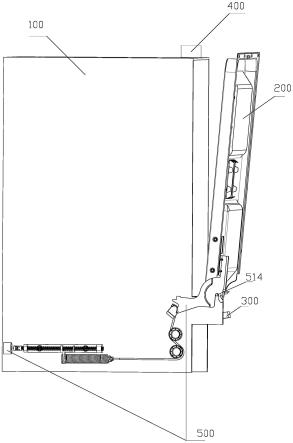
32.图1-图2为本公开实施例提供的一种食材处理装置的结构示意图;
33.图3为本公开实施例提供的一种食材处理装置中的上料装置的结构示意图;
34.图4为本公开实施例提供的一种食材处理装置中的切割装置的结构示意图;
35.图5为本公开实施例提供的一种食材处理装置中的切割装置的俯视图;
36.图6为本公开实施例提供的盖子的结构示意图;
37.图7为本公开实施例提供的第一电机与连接杆的结构示意图;
38.图8为本公开实施例提供的料斗的结构示意图;
39.图9为本公开实施例提供的一种食材处理装置的纵向剖视图;
40.图10为本公开实施例提供的第一刀片组件的结构示意图;
41.图11为本公开实施例提供的第二刀片组件的结构示意图;
42.图12为本公开实施例提供的第一刀片组件与第二刀片组件完全交叉重合的结构示意图;
43.图13为本公开实施例提供的壳体中各结构的结构示意图;
44.图14为本公开实施例提供的一种食材处理装置的另一结构示意图;
45.图15为本公开实施例提供的存放盒的结构示意图;
46.图16-图17为本公开实施例提供的一种食材处理方法的流程图;
47.图18为本公开实施例提供的一种控制装置的结构示意图。
48.附图标记说明
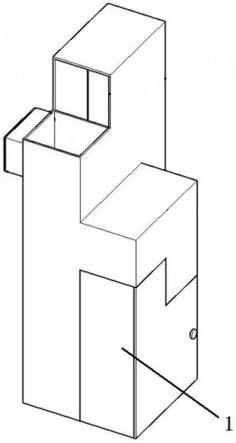
49.1:控制装置;2:上料装置;3:切割装置;4:壳体;5:盖子; 6:存放盒;
50.21:料斗;22:传送组件;
51.211:料斗的斜坡面;212:凸棱;
52.221:第一电机;222:定滑轮结构;223:连接杆;224:圆盘; 225:滑槽;
53.2221:滑轮;2222:绳子;2223:第一固定杆;
54.31:容纳空间;32:切割组件;
55.321:第二电机;322:第一刀片组件;323:第二刀片组件;324:传感器;325:侧壁;326:转轴;327:第二固定杆;
56.3221:第一刀片组件中的刀片;3231:第二刀片组件中的刀片;
57.41:加工区;42:通道区;43:准备区;
58.411:加工区的斜坡面;412:加工区的下料口;
59.421:通道区的斜坡面一;422:通道区的斜坡面二;
60.431:出料口;432:下料口:
61.61:存放盒把手。
具体实施方式
62.为使本领域技术人员更好地理解本公开的技术方案,下面结合附图和具体实施方式对本公开作进一步详细描述。
63.为了解决多功能食材处理装置无法实现智能联网,人机交互能力差,并且反复切割,需要耗费较长的时间,同时耗费较多的电能的问题。本公开提供一种食材处理装置及方法、控制装置。以下分别结合本公开提供的实施例的附图逐一进行详细说明。
64.作为本公开的第一个方面,提供一种食材处理装置。
65.如图1-图5所示,本实施例提供的食材处理装置包括控制装置 1、上料装置2和切割装置3,所述上料装置2包括料斗21和传送组件22,所述传送组件22与所述料斗21相连,所述切割装置3包括容纳结构31和与所述容纳结构31相连接的切割组件32。
66.料斗21,用于在传送组件22的带动下,运动到容纳结构31的开口处,以使料斗21中的蔬菜能够落入容纳结构31中。
67.切割组件32,用于对容纳结构31中的蔬菜进行切割。
68.所述控制装置1,用于根据操作指令启动传送组件22和切割组件32。
69.本公开实施例中,控制装置1根据操作指令启动传送组件22和切割组件32,料斗21在传送组件22的带动下,运动到容纳结构31 的开口处,料斗21中的蔬菜能落入容纳结构31中,切割组件32对容纳结构31中的蔬菜进行切割。
70.在一种优选的实施方式中,如图2和图6所示,所述盖子5的内部为中空结构,其底面与一个侧面是敞开的,其用于盖住切割组件 32。
71.在初始状态下,如图5所示,料斗21位于容纳结构31的开口处,在食材处理装置的盖子5打开的情况下,将蔬菜放在料斗21的斜坡面211上。在切割组件32对容纳结构31中的食材切割一次或两次之后,料斗21在传送组件22的带动下,再运动到容纳结构31的开口处。本公开实施例中的食材包括蔬菜、片状蔬菜和丝状蔬菜。
72.本公开实施例提供的食材处理装置,通过控制装置能够与用户实现信息的交互,可以实现智能联网,便于人们远程进行控制。切割装置和上料装置在控制装置的控制下,一次可切割大量的食材,不需要耗费较长的时间,并且不会耗费太多的电能。
73.在一种优选的实施方式中,控制装置1包括:通信模块和中央处理单元。通信模块设置在控制装置1的内部,用于实现食材处理装置与外部控制设备进行数据的传送与交换,比如,外部控制设备采用手机或电脑。中央处理单元设置在控制装置1的内部,用于处理外部控制设备发送的各种操作指令,并发送处理结果至通信模块。
74.在一种优选的实施方式中,控制装置1还包括语音采集模块。语音采集模块设置在控制装置1的外壁面上,用于采集用户发出的声音口令,采集到的声音口令通过中央处理单元处理。
75.在一种优选的实施方式中,控制装置1还包括显示模块和智能摄像头。显示模块设置在控制装置1的外壁面上,人们通过观察显示模块显示的内容,了解食材处理装置内部处理合作食材,以及对食材加工的情况。智能摄像头设置在盖子5的内壁面上,其对各种食材进行图像拍摄,拍摄的食材图像信息发送至中央处理单元,最终在显示模块上显示处理的食材所属的种类。
76.在一些实施例中,如图3所示,传送组件22包括第一电机221 和定滑轮结构222,定
滑轮结构包括滑轮2221、绳子2222和第一固定杆2223,所述滑轮2221套接在第一固定杆2223上,绳子2222套接在滑轮2221上,第一电机221与绳子2222的一端连接,绳子2222 的另一端与所述料斗21连接。第一固定杆2223固定在食材处理装置中壳体4(如图2所示)的顶部位置。第一电机221固定在壳体4的底部位置。
77.第一电机221用于接收到控制装置1发送的第一启动指令后,卷绕绳子2222。通过卷绕绳子2222,将料斗21上升或下降。如图7 所示,传送组件2还包括与第一电机221连接的连接杆223,卷绕绳子2222时,将绳子卷到连接杆223上。连接杆223上固定两个圆盘 224,其目的是对卷绕在连接杆223上的绳子2222起到限位的作用,避免绳子2222串动造成不必要的麻烦。
78.在一种优选的实施方式中,如图8所示,料斗21其内部设置有斜坡面211,且料斗21的两个相对的外侧壁上分别设置有凸棱212。如图9所示,传送组件22还包括相对的内壁上分别设置的滑槽225,凸棱212嵌在滑槽225内。两个相对的内壁上分别设置有滑槽。凸棱212和滑槽225设置为半圆柱体,其目的是便于凸棱212在滑槽225 内滑动。
79.在一些实施例中,如图4-图5所示,切割组件32包括第二电机 321、第一刀片组件322、第二刀片组件323、传感器324和侧壁325,第一刀片组件322与第二电机321连接,第一刀片组件322与第二刀片组件323相互交错设置,传感器324设置在与第一刀片组件322 初始状态下的位置水平的侧壁325上。
80.在一种优选的实施方式中,如图4-图5所示,切割装置3还包括转轴326和第二固定杆327。如图10所示,第一刀片组件322由多个相互平行且等距的刀片3221组成,第一刀片组件322固定在转轴326上,转轴326与第二电机321连接。如图11所示,第二刀片组件323由多个相互平行且等距的刀片3231组成,第二刀片组件323 固定在第二固定杆327上。初始状态下第一刀片组件322水平设置。第一刀片组件322为双刃刀片组件,第二刀片组件323可以为双刃刀片组件,也可以为单刃刀片组件。
81.在一种优选的实施方式中,如图4所示,第二电机321设置有箱门。
82.第二电机321,用于接收到控制装置1的第二启动指令后,带动第一刀片组件322转动;接收控制装置1的停止指令,控制第一刀片组件322停止转动。
83.传感器324,用于在第一刀片组件322旋转一周之后向控制装置 1发送信号,以使控制装置1向第二电机321发送停止指令。
84.如图4所示,第一刀片组件322顺时针旋转,第二刀片组件323 固定不动。食材在容纳结构31中,在容纳结构31中第一刀片组件 322和第二刀片组件323的夹角逐渐变小,当第一刀片组件322旋转一周即完成一次切菜。如图12所示,当第一刀片组件322与第一刀片组件323完全交叉重合时,蔬菜被切成片状蔬菜,或者从片状蔬菜切成丝状蔬菜,或者从丝状蔬菜切成丁状蔬菜。当第一刀片组件322 旋转一周之后又回到水平位置时,触发传感器324向控制装置1发送信号,控制装置1向第二电机321发送停止指令,第二电机321停止转动。
85.在一些实施例中,容纳结构31为第一刀片组件322、第二刀片组件323与所述侧壁325生成的空间。如图5所示,容纳空间31为食材从料斗的斜坡面211落入的空间。在初始状态下第一刀片组件 323为水平状态时,容纳空间31为立方体,在切菜过程中容纳空间 31的体积逐渐变小。
86.在一种优选的实施方式中,刀片3221的表面设置有纹路,其目的是避免食材与刀
片3221粘连在一起。
87.在一种优选的实施方式中,刀片3231的表面设置有纹路,其目的是避免食材与刀片3231粘连在一起。
88.本公开实施例中,避免出现食材粘附在刀片上的现象,刀片易于清洗,而现有技术在加工过程中,食材容易粘附刀片上,影响加工过程。
89.在一种优选的实施方式中,如图13所示,壳体4包括加工区41、通道区42、准备区43。加工区41位于壳体4顶部的一端,加工区 41的顶部为敞开的,加工区41中用于切割食材,加工区41的底部设置为加工区41的斜坡面411,加工区41的斜坡面411的底部设置有加工区41的下料口412。通道区42为封闭的结构,其与加工区41 相连通,通道区42内部分别设置有通道区42的斜坡面一421和通道区42的斜坡面二422,通道区42的斜坡面一421位于通道区42的斜坡面422的上方。准备区43的上半部与加工区41相连,准备区 43的下半部与通道区42相连,准备区43的顶部设置有出料口431,出料口431与加工区41相通,准备区43的侧壁设置有下料口432,下料口432与通道区42的斜坡面二422相通。
90.具体的,在加工区中切割完的食材从加工区41的下料口412滑出,滑入通道区42,经过通道区42的斜坡面一421和通道区42的斜坡面二422从下料口432滑出。出料口431位于容纳结构31的开口处,即食材从出料口431中落入容纳结构31中。
91.在一种优选的实施方式中,本公开实施例中的所有斜坡面均设置为光滑的,其目的是防止食材附着在其表面。
92.在一些实施例中,食材处理装置还包括存放盒6,如图6和图 14所示,存放盒6位于切割装置3的下料口处432的下方位置,存放盒6,用于盛放从下料口43下落的片状蔬菜或丝状蔬菜或丁状蔬菜。如图14所示,壳体4的底部位置有插入口,存放盒6可以从插入口插入到壳体4中,存放盒6也可以取出。如图6所示,存放盒6 位于下料口处432的下方位置,当料斗21运动到下料口432时,切割完的食材(片状蔬菜或丝状蔬菜或丁状蔬菜)落入料斗21中;当料斗21未运动到下料口432时,切割完的食材不落入料斗21中,而是落入下料口处432的下方的存放盒6中。如图15所示,存放盒6 设置有存放盒把手61。
93.在一些实施例中,控制装置1,还用于启动切割组件32一次或两次之后,根据操作指令控制传送组件22启动以使料斗21运动到切割装置3的下料口处,以使料斗21能够接收切割组件切割成的片状蔬菜或丝状蔬菜;再控制传送组件22启动以使携带片状蔬菜或丝状蔬菜的料斗21运动到容纳结构31的开口处。
94.本公开实施例中,控制指令包括切片指令、切丝指令和切丁指令。控制装置1根据用户的操作指令或声音口令,选择切片模式。当控制指令为切片指令,切割组件只切割一次。当控制指令为切丝指令,切割组件切割两次。当控制指令为切丁指令,切割组件切割三次。
95.具体的,操作指令为切片指令时,控制传送组件22启动以使携带蔬菜的料斗21运动至容纳结构31的开口处,在盖子5打开的情况下,用户将蔬菜放入料斗21中。蔬菜从料斗21落入容纳结构31中,并控制切割组件32将容纳结构31中的蔬菜切割成片状蔬菜。片状蔬菜通过加工区41的下料口412进入通道区42,从下料口432滑出,落入存放盒6中。
96.操作指令为切丝指令时,在启动切割组件32一次之后,根据切丝指令控制传送组件22启动以使料斗21从出料口431运动到下料口 432处。同时片状蔬菜通过加工区41的下
料口412进入通道区42,从下料口432滑出,位于下料口432的料斗21接收片状蔬菜。控制传送组件22启动以使携带片状蔬菜的料斗运动到容纳结构31的开口处,使片状蔬菜从料斗21落入容纳结构31中,并控制切割组件32 将容纳结构31中的片状蔬菜切割成丝状蔬菜。丝状蔬菜通过加工区 41的下料口412进入通道区42,从下料口432滑出,落入存放盒6 中。
97.操作指令为切丁指令时,在启动切割组件32一次或两次之后,根据切丁指令控制传送组件22启动以使料斗21从出料口431运动到下料口432处。同时片状蔬菜或丝状蔬菜通过进入通道区42,从下料口432滑出,料斗21能够接收片状蔬菜或丝状蔬菜。控制传送组件22启动以使携带片状蔬菜或丝状蔬菜的料斗21运动到容纳结构 31的开口处,使片状蔬菜或丝状蔬菜从料斗21落入容纳结构31中,并控制切割组件22将容纳结构31中的片状蔬菜切割成丝状蔬菜,或将容纳结构31中的丝状蔬菜切割成丁状蔬菜。丝状蔬菜或丁状蔬菜通过加工区41的下料口412进入通道区42,从下料口432滑出,落入存放盒6中。
98.本公开实施例中,通过多种组合模式,对食材进行加工,能够加工成各种所需的形状,便于人们远程进行控制。
99.作为本公开的第二个方面,提供一种食材处理方法,应用于第一方面提供的食材处理装置,所述方法包括:
100.步骤s101,接收用户的操作指令。
101.步骤s102,根据操作指令控制传送组件启动以使携带蔬菜的料斗运动至容纳结构的开口处,使蔬菜从料斗落入容纳结构中,并控制切割组件切割容纳结构中的蔬菜。
102.在步骤s101-步骤s102中,操作指令为切片指令时,控制传送组件22启动以使携带蔬菜的料斗21运动至容纳结构31的开口处,在盖子5打开的情况下,用户将蔬菜放入料斗21中。蔬菜从料斗21 落入容纳结构31中,并控制切割组件32将容纳结构31中的蔬菜切割成片状蔬菜。片状蔬菜通过加工区41的下料口412进入通道区42,从下料口432滑出,落入存放盒6中。
103.本公开实施例提供的食材处理方法,通过控制装置能够与用户实现信息的交互,可以实现智能联网,便于人们远程进行控制。切割装置和上料装置在控制装置的控制下,一次即可切割大量食材,不需要耗费较长的时间,并且不会耗费太多的电能。
104.在一些实施例中,控制切割组件切割容纳结构中的蔬菜(即步骤s102)之后,还包括:
105.步骤s201,在确定出启动切割组件一次或两次之后,根据操作指令控制传送组件启动以使料斗运动到切割装置的下料口处,以使料斗能够接收切割组件切割成的片状蔬菜或丝状蔬菜。
106.步骤s202,控制传送组件启动以使携带片状蔬菜或丝状蔬菜的料斗运动到容纳结构的开口处,使片状蔬菜或丝状蔬菜从料斗落入容纳结构中,并控制切割组件切割容纳结构中的片状蔬菜或丝状蔬菜。
107.在步骤s201-步骤s202中,控制指令包括切片指令、切丝指令和切丁指令。控制装置1根据用户的操作指令或声音口令,选择切片模式。当控制指令为切片指令,切割组件只切割一次。当控制指令为切丝指令,切割组件切割两次。当控制指令为切丁指令,切割组件切割三次。
108.操作指令为切丝指令时,在启动切割组件32一次之后,根据切丝指令控制传送组
件22启动以使料斗21从出料口431运动到下料口 432处。同时片状蔬菜通过加工区41的下料口412进入通道区42,从下料口432滑出,位于下料口432的料斗21接收片状蔬菜。控制传送组件22启动以使携带片状蔬菜的料斗运动到容纳结构31的开口处,使片状蔬菜从料斗21落入容纳结构31中,并控制切割组件32 切割容纳结构31中的片状蔬菜。切割出的丝状蔬菜通过加工区41 的下料口412进入通道区42,从下料口432滑出,落入存放盒6中。
109.操作指令为切丁指令时,在启动切割组件32一次或两次之后,根据切丁指令控制传送组件22启动以使料斗21从出料口431运动到下料口432处。同时片状蔬菜或丝状蔬菜通过进入通道区42,从下料口432滑出,料斗21能够接收片状蔬菜或丝状蔬菜。控制传送组件22启动以使携带片状蔬菜或丝状蔬菜的料斗21运动到容纳结构 31的开口处,使片状蔬菜或丝状蔬菜从料斗21落入容纳结构31中,并控制切割组件22切割容纳结构31中的片状蔬菜或丝状蔬菜。切割出的丝状蔬菜或丁状蔬菜通过加工区41的下料口412进入通道区42,从下料口432滑出,落入存放盒6中。
110.本公开实施例中,通过多种组合模式,对食材进行加工,能够加工成各种所需的形状,便于人们远程进行控制。
111.作为本公开的第三个方面,提供一种控制装置,包括:
112.接收模块11,用于接收用户的操作指令;
113.第一控制模块12,用于根据所述操作指令控制所述传送组件启动以使携带蔬菜的所述料斗运动至所述容纳结构的开口处,使所述蔬菜从所述料斗落入所述容纳结构中,并控制所述切割组件切割所述容纳结构中的蔬菜。
114.优选地,还包括:
115.第二控制模块,用于在确定出启动所述传送组件和所述切割组件一次或两次之后,根据所述操作指令控制所述传送组件启动以使所述料斗运动到所述切割装置的下料口处,以使所述料斗能够接收所述切割组件切割成的片状蔬菜或丝状蔬菜;
116.第三控制模块,用于控制所述传送组件启动以使携带所述片状蔬菜或所述丝状蔬菜的料斗运动到所述容纳结构的开口处,使所述片状蔬菜或所述丝状蔬菜从所述料斗落入所述容纳结构中,并控制所述切割组件切割所述容纳结构中的片状蔬菜或丝状蔬菜。
117.可以理解的是,以上实施方式仅仅是为了说明本公开的原理而采用的示例性实施方式,然而本公开并不局限于此。对于本领域内的普通技术人员而言,在不脱离本公开的精神和实质的情况下,可以做出各种变型和改进,这些变型和改进也视为本公开的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。