1.本发明涉及电器设备技术领域,尤其涉及一种自动开门装置、控制方法及电器。
背景技术:
2.洗碗机是自动清洗碗、筷、盘、碟、刀、叉等餐具的设备。市面上的全自动洗碗机可以分为家用和商用两类,家用全自动洗碗机只适用于家庭,主要有柜式、台式及水槽一体式。近些年来,随着家用电器,如洗碗机电器的不断研发和创新,其自动化和智能化程度不断提高,如国内专利号为cn201920943868.3和cn201920810776.8的实用新型专利均在洗碗机降温排湿等细节的使用上提高了自动化程度和用户的使用体验,但是在日常生活中还存在各种各样的细节问题需要进一步研究和创新,例如,当我们双手均被占用的情况下,无法腾出一只手来打开洗碗机,或者无法通过智能控制的方式对洗碗机的门体进行打开或关闭,进而严重影响了用户的使用体验。
3.有鉴于此,特提出本发明。
技术实现要素:
4.本发明要解决的技术问题在于克服现有技术的不足,提供一种自动开门装置、控制方法及电器,用户在使用该自动开门装置或者应用该自动开门装置的电器时,能够通过自动化、智能化的感应控制方式打开或关闭门体,使用户解放了双手,提升了电器的自动化程度,提高了用户的使用体验。
5.为了实现该目的,根据本发明的一个方面,本发明采用如下技术方案:
6.一种自动开门装置,包括:第一开门机构,可将门体弹开至第一预设角度;第二开门机构,配合所述第一开门机构将门体打开至第二预设角度;感应控制模块,接收开门信号,控制所述第一开门机构和第二开门机构的启动,将门体打开至第二预设角度。
7.进一步地,所述第二开门机构包括传动组件;所述传动组件包括螺杆和与螺杆螺纹配合的旋进螺母、以及连接在所述旋进螺母和门体之间的弹簧拉绳组件。
8.优选地,所述第二开门机构还包括第一滑轮、第二滑轮和铰链结构,所述铰链结构与门体连接,所述弹簧拉绳组件的第一端与旋进螺母连接,第二端与铰链结构连接。
9.优选地,所述第二开门机构包括转向轴组件和第二驱动机构,转向轴组件的一端与第二驱动机构连接,另一端与螺杆的第一端连接。
10.进一步地,所述第二开门机构还包括用于检测旋进螺母在螺杆上所处的位置信息的位置检测装置。
11.优选地,所述位置检测装置包括:被检测端子,所述被检测端子设置在旋进螺母上;位置传感器,所述位置传感器对应被检测端子设置,具有能够感应到被检测端子的感应区。
12.更优地,所述位置检测装置为电磁式传感器,所述位置传感器为电磁传感器,所述被检测端子为永磁体转子。
13.或者为光电式位置传感器,所述位置传感器为光电传感器,所述被检测端子为遮光板。
14.或者为差动电压式传感器,所述位置传感器为差动电压传感器,所述被检测端子为衔铁。
15.或者为电涡流式传感器,所述位置传感器为电涡流传感器,所述被检测端子为金属板。
16.或者为霍尔式传感器,所述位置传感器为霍尔传感器,所述被检测端子为永磁铁。
17.或者为干簧管式传感器,所述位置传感器为干簧管传感器,所述被检测端子为永磁体。
18.进一步地,所述第二开门机构还包括用于支撑固定所述螺杆的螺杆支架;所述位置传感器对应设置在螺杆支架上,与被检测端子的位置相对应。
19.进一步地,所述螺杆支架包括在螺杆的轴向方向具有一延伸长度的支撑基板和连接在支撑基板两端的支撑脚,所述位置传感器设置在所述支撑基板上。
20.进一步地,所述支撑脚上设置有用于支撑固定所述螺杆的转轴孔,所述螺杆的两端可转动地设置在所述转轴孔内。
21.优选地,所述旋进螺母在螺杆上所处的位置包括靠近门体侧的开门位置、远离门体侧的关门位置、以及位于开门位置和关门位置之间的初始位置;
22.优选地,所述位置传感器包括三个,分别对应所述开门位置、关门位置、初始位置设置在支撑基板上。
23.进一步地,所述第一开门机构包括第一驱动机构和弹出机构,第一驱动机构通过驱动弹出机构动作将门体弹开至第一预设角度。
24.优选地,所述第一开门机构还包括与第一驱动机构连接用于锁定或解锁门体的解锁机构,所述解锁机构在第一驱动机构的驱动下解锁,弹出机构动作将门体弹开至第一预设角度。
25.进一步地,所述感应控制模块包括:感应模块,用于接收外界开门或关门的感应信号,并向该信号发送至控制模块;控制模块,接收所述感应模块发送的开门或关门感应信号,控制第一开门机构和/或第二开门机构动作,打开或关闭门体。
26.优选地,所述感应模块包括红外感应装置或语音控制装置。
27.本发明的另一目的,还提供了一种如上所述的一种自动开门装置的控制方法,该控制方法包括:接收开门信号,控制第一开门机构将门体弹出至第一预设角度;在门体弹开后,控制第二开门机构启动将门体打开至第二预设角度。
28.进一步地,该控制方法还包括自动关门步骤:接收关门信号,控制第二开门机构关闭门体。
29.优选地,红外感应装置或语音控制装置接收关门信号,控制模块控制驱动模块驱动旋进螺母向关门位置移动,直至旋进螺母移动至关门位置停止驱动,关闭门体。
30.本发明的第三个目的,提供了一种电器,包括如上所述的自动开门装置、采用如上所述控制方法的电器。
31.优选地,该电器包括箱体和可转动地连接在箱体上的门体;所述第一开门机构设置于箱体的上部,所述第二开门机构设置于箱体的下部。
32.优选地,所述箱体的底部固定设置有转动轴,所述门体通过铰链结构可转动地连接在转动轴上;所述感应控制模块设置在门体下部的箱体上。
33.采用上述技术方案后,本发明与现有技术相比具有以下有益效果:
34.1.本发明设置了开门机构以及控制开门机构的感应控制模块,其能够自动化的接收外界的开门信号并转化为电信号,传输至感应控制模块,在第一开门机构弹开较小角度门体的基础上,控制第二开门机构打开至任意角度,直至完全打开门体为止。该发明在一定程度上解放了用户的双手,提升了用户的使用体验,提高了电器的自动化和智能化程度。
35.2.第二开门结构的整体设计简单,选择使用的零部件较为常规,节省了电器制作的成本,提高了拆卸、维修、部件更换的便捷性。同时,用于检测旋进螺母在螺杆上所处的位置信息的位置检测装置的设置,使自动开门装置精确开门和关门动作,避免了关不上门或打开不完全情况的发生。
附图说明
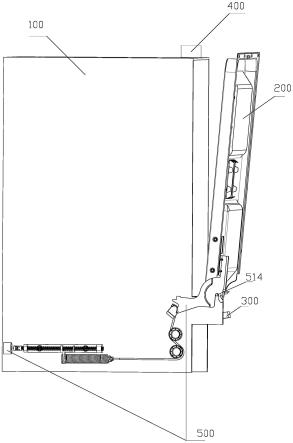
36.图1是本发明实施例提供的应用该自动开门装置的电器结构示意图;
37.图2是本发明实施例提供的第二开门机构的结构示意图一;
38.图3是本发明实施例提供的第二开门机构的结构示意图二;
39.图4是本发明实施例提供的第二开门机构的局部结构示意图;
40.图5是本发明实施例提供的旋进螺母结构示意图;
41.图6是本发明实施例提供的螺杆支架结构示意图;
42.图7是本发明实施例提供的旋进螺母在螺杆上所处对应的开门位置、关门位置以及初始位置的示意图;
43.图8是本发明实施例提供的自动开门装置的控制方法流程示意图一;
44.图9是本发明实施例提供的自动开门装置的控制方法流程示意图二;
45.图中:
46.100-箱体;200-门体;300-感应模块;400-第一开门机构;500-第二开门机构;501-电机;502-万向轴;503-螺杆;504-旋进螺母;5041-螺纹连接部;5042-弹簧连接部;505-弹簧;506-拉绳;507-第一滑轮;508-第二滑轮;509-铰链;510-螺杆支架;5101-支撑基板;5102-支撑脚;5103-转轴孔;511-开门位置;512-关门位置;513-初始位置;514-转动轴。
47.需要说明的是,这些附图和文字描述并不旨在以任何方式限制本发明的构思范围,而是通过参考特定实施例为本领域技术人员说明本发明的概念。
具体实施方式
48.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对实施例中的技术方案进行清楚、完整地描述,以下实施例用于说明本发明,但不用来限制本发明的范围。
49.在本发明的描述中,需要说明的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
50.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
51.当用户双手被占用时比如双手用来拿取餐具而无法腾出一只手来打开洗碗机门,需要把手中的餐具放下后再进行开门动作,针对这样的不足此发明可以解决此类的问题,通过感应装置或者语音控制帮助用户打开洗碗机门。
52.下面结合实施例对本发明进行进一步地详细的说明。
53.如图1-7所示,一种自动开门装置,包括:第一开门机构400,可将门体200弹开至第一预设角度;第二开门机构500,配合所述第一开门机构400将门体200打开至第二预设角度;感应控制模块,接收开门信号,控制所述第一开门机构400和第二开门机构500的启动,将门体200打开至第二预设角度。
54.进一步地,如图1所示,所述第一开门机构400可以包括第一驱动机构和弹出机构,第一驱动机构通过驱动弹出机构动作将门体200弹开至第一预设角度。所述第一开门机构400还包括与第一驱动机构连接用于锁定或解锁门体200的解锁机构,所述解锁机构在第一驱动机构的驱动下解锁,弹出机构动作将门体200弹开至第一预设角度。
55.应当理解的,第一开门机构400不限于上述结构或组成,还可以为任何其他能够使门体200弹开一定或较小角度的设备、装置、结构均可以,此处不作限定,例如第一开门机构400还可以包括:第一开门机构400与感应控制模块电连接;第一开门机构400包括:第一驱动机构、与第一驱动机构传动连接的推杆,所述门体200内开设有容置腔,所述门体200还开设有供所述推杆伸入所述容置腔的伸入口,所述推杆的端部由所述伸入口活动伸入所述容置腔内,所述容置腔内设置有与所述推杆锁定配合的锁钩结构,所述锁钩结构包括设置于所述容置腔内的锁定块和定位弹簧,所述推杆开设有与所述锁定块锁定配合的定位孔,所述定位弹簧使所述锁定块始终具有插入所述定位孔的运动趋势;所述锁定块设置有导向面,所述导向面引导所述锁定块插入或脱离所述定位孔;第一驱动机构运作时,推杆通过所述锁定块推开所述门体200;当推杆与所述锁定块之间的相互作用力大于所述定位弹簧的弹性力时,所述锁定块从所述定位孔脱出。
56.进一步地,如图2-4所示,所述第二开门机构500包括传动组件;所述传动组件包括螺杆503和与螺杆503螺纹配合的旋进螺母504、以及连接在所述旋进螺母504和门体200之间的弹簧拉绳组件。所述第二开门机构500还包括第一滑轮507、第二滑轮508和铰链509结构,所述铰链509结构与门体200连接,所述弹簧拉绳组件的第一端与旋进螺母504连接,第二端与铰链509结构连接。所述第二开门机构500包括转向轴组件和第二驱动机构,转向轴组件的一端与第二驱动机构连接,另一端与螺杆503的第一端连接。转向轴组件可以包括万向轴502。第二驱动机构至少包括能够正转和反转的电机501。
57.优选地,如图5所示,弹簧拉绳组件包括弹簧505和拉绳506。旋进螺母504包括螺纹连接部5041和弹簧连接部5042。弹簧505的第一端与旋进螺母504的弹簧连接部5042固定连接,弹簧505的第二端与拉绳506的第一端连接。拉绳506的第二端与铰链509结构连接。
58.进一步地,如图6所示,所述第二开门机构500还包括用于支撑固定所述螺杆503的螺杆503支架510;所述螺杆503支架510包括在螺杆503的轴向方向具有一延伸长度的支撑
基板5101和连接在支撑基板5101两端的支撑脚5102,支撑脚5102上设置有用于支撑固定所述螺杆503的转轴孔5103,所述螺杆503的两端可转动地设置在所述转轴孔5103内。优选地,如图7所示,所述旋进螺母504在螺杆503上所处的位置包括靠近门体200侧的开门位置511、远离门体200侧的关门位置512、以及位于开门位置511和关门位置512之间的初始位置513。
59.进一步地,所述第二开门机构500还包括用于检测旋进螺母504在螺杆503上所处的位置信息的位置检测装置。所述位置检测装置可以包括:被检测端子,所述被检测端子设置在旋进螺母504上;位置传感器,所述位置传感器对应被检测端子设置,具有能够感应到被检测端子的感应区。
60.其中,所述位置检测装置可以为电磁式传感器,所述位置传感器为电磁传感器,所述被检测端子为永磁体转子。或者为光电式位置传感器,所述位置传感器为光电传感器,所述被检测端子为遮光板。或者为差动电压式传感器,所述位置传感器为差动电压传感器,所述被检测端子为衔铁。或者为电涡流式传感器,所述位置传感器为电涡流传感器,所述被检测端子为金属板。或者为霍尔式传感器,所述位置传感器为霍尔传感器,所述被检测端子为永磁铁。或者为干簧管式传感器,所述位置传感器为干簧管传感器,所述被检测端子为永磁体。应当理解的是,位置检测装置不限于以上设备或零件,还可以为红外传感器等任何能够用于检测旋进螺母504在螺杆503上所处的位置信息的装置,此处不作限定。
61.所述位置传感器可以对应设置在螺杆503支架510上,与被检测端子的位置相对应。所述位置传感器设置在所述支撑基板5101上。优选地,所述位置传感器包括三个,分别对应所述开门位置511、关门位置512、初始位置513设置在支撑基板5101上。可以理解的是,位置传感器也可以设置在支撑脚5102上获其他任何能够检测旋进螺母504具体位置的地方,此处不作限定。
62.进一步地,所述感应控制模块包括:感应模块300,用于接收外界开门或关门的感应信号,并向该信号发送至控制模块;控制模块,接收所述感应模块300发送的开门或关门感应信号,控制第一开门机构400和/或第二开门机构500动作,打开或关闭门体200。优选地,所述感应模块300包括红外感应装置或语音控制装置。
63.本发明的另一目的,还提供了一种如上所述的一种自动开门装置的控制方法,如图8所示,该控制方法包括:接收开门信号,控制第一开门机构400将门体200弹出至第一预设角度;在门体200弹开后,控制第二开门机构500启动将门体200打开至第二预设角度。
64.进一步地,如图9所示,该控制方法还包括自动关门步骤:接收关门信号,控制第二开门机构500关闭门体200。
65.优选地,红外感应装置或语音控制装置接收关门信号,控制模块控制驱动模块驱动旋进螺母504向关门位置512移动,直至旋进螺母504移动至关门位置512停止驱动,关闭门体200。
66.本发明的第三个目的,还提供了一种电器,该电器可以为洗碗机、消毒柜等任何可以使用该自动开门装置的电器和采用如上所述的控制方法的电器。
67.优选地,该电器包括箱体100和可转动地连接在箱体100上的门体200;所述第一开门机构400设置于箱体100的上部,所述第二开门机构500设置于箱体100的下部。
68.优选地,所述箱体100的底部固定设置有转动轴514,所述门体200通过铰链509结构可转动地连接在转动轴514上;所述感应控制模块设置在门体200下部的箱体100上。
69.所述螺杆503支架510固定在箱体100的底座上;优选地,螺杆503支架510通过螺栓和螺母将支撑基板5101和箱体100的底座进行固定连接。
70.本电器的工作原理包括:接通电源后,门体200处于关门状态时,旋进螺母504处于预设位置,即螺杆503中间处的初始位置513,此时门体200和第二开门机构500处于平衡状态。当语音控制或者红外线传感器感受到预设信号时,会将信号转化为电信号传输至控制模块,控制模块根据信号的内容,向第一开门机构400发送开门信号,在第一开门机构400将门体200弹开一较小角度后(第一开门机构400的作用是打破门体200和第二开门机构500的平衡状态),控制模块控制第二驱动装置动作,通过万向轴502带动螺杆503转动,螺杆503的转动能够使旋进螺母504向右侧,也就是向开门位置511的方向移动,此时旋进螺母504带动弹簧505和拉绳506向右移动,此时弹簧505处于松弛状态,在第一开门机构400弹开的前提下,第二驱动装置能够控制门体200的进一步打开直至完全打开。
71.此时应当理解的是,在门体200完全打开后,位置检测装置可以检测到旋进螺母504已处于开门位置511,此时其将向控制模块发送信号,控制模块会控制旋进螺母504返回至螺杆503中间处的初始位置513。待旋进螺母504已处于初始位置513时,位置检测装置检测到旋进螺母504所处位置信息,会向控制模块发送信号,控制第二驱动机构停止工作,使旋进螺母504锁定在初始位置513,进而随时为后续其他动作做好准备。
72.当需要关门时,再次发出相应的语音提示或利用红外传感器进行检测扫描(当然也可以为按键式,直接控制控制模块进行关门动作),获取到关门信息后发送至控制模块,此时控制模块向第二驱动机构发送信息,驱动旋进螺母504向关门位置512方向移动,直至达到关门位置512处为止,位置检测装置向控制模块发送信号,停止进一步的移动,直至门体200完全关闭为止。当门体200完全关闭后,位置检测装置再次向控制模块发送信号,控制旋进螺母504移动至初始位置513,使旋进螺母504锁定在初始位置513,进而随时为后续其他动作做好准备。
73.还应当理解的是,该电器还可以手动操作,用户可以手动开关门,开门时旋进螺母504不动,弹簧505被拉伸,受弹簧505拉力的影响,门体200可以停止在任意位置。
74.本发明设置了开门机构以及控制开门机构的感应控制模块,其能够自动化的接收外界的开门信号并转化为电信号,传输至感应控制模块,在第一开门机构400弹开较小角度门体200的基础上,控制第二开门机构500打开至任意角度,直至完全打开门体200为止。该发明在一定程度上解放了用户的双手,提升了用户的使用体验,提高了电器的自动化和智能化程度。
75.第二开门结构的整体设计简单,选择使用的零部件较为常规,节省了电器制作的成本,提高了拆卸、维修、部件更换的便捷性。同时,用于检测旋进螺母504在螺杆503上所处的位置信息的位置检测装置的设置,使自动开门装置精确开门和关门动作,避免了关不上门或打开不完全情况的发生。
76.实施例一
77.如图1-7所示,本实施例中应用该自动开门装置的电器为洗碗机,该洗碗机包括箱体100和可转动地连接在箱体100上的门体200。
78.一种自动开门装置,包括:第一开门机构400,可将门体200弹开5-10
°
角;第二开门机构500,配合所述第一开门机构400将门体200打开至10
°‑
90
°
角;红外感应装置用于接收
外界开门或关门的感应信号,并向该信号发送至控制模块;控制模块,接收所述感应模块300发送的开门或关门感应信号,控制第一开门机构400和/或第二开门机构500动作,打开或关闭门体200。
79.如图1所示,第一开门机构400包括第一驱动机构和弹出机构,第一驱动机构通过驱动弹出机构动作将门体200弹开至5
°‑
10
°
角。第一开门机构400还包括与第一驱动机构连接用于锁定或解锁门体200的解锁机构,所述解锁机构在第一驱动机构的驱动下解锁,弹出机构动作将门体200弹开。
80.进一步地,如图2-5所示,所述第二开门机构500包括电机501、万向轴502、螺杆503和与螺杆503螺纹配合的旋进螺母504、以及连接在所述旋进螺母504和门体200之间的弹簧505、拉绳506、第一滑轮507、第二滑轮508和铰链509。
81.万向轴502的一端与电机501的输出端连接,另一端与螺杆503的第一端连接。旋进螺母504包括螺纹连接部5041和弹簧连接部5042。弹簧505的第一端与旋进螺母504的弹簧连接部5042固定连接,弹簧505的第二端与拉绳506的第一端连接。拉绳506的第二端与铰链509结构,第一滑轮507和第二滑轮508经拉绳506设在在拉绳506的第二端与铰链509之间,所述铰链509与门体200连接。第一滑轮507和第二滑轮508固定在箱体100侧壁上。
82.如图6所示,支撑固定所述螺杆503的装置可以为螺杆503支架510;所述螺杆503支架510包括在螺杆503的轴向方向具有一延伸长度的支撑基板5101和连接在支撑基板5101两端的支撑脚5102,支撑脚5102上设置有用于支撑固定所述螺杆503的转轴孔5103,所述螺杆503的两端可转动地设置在所述转轴孔5103内。螺杆503支架510固定在箱体100的底座上;优选地,螺杆503支架510通过螺栓和螺母将支撑基板5101和箱体100的底座进行固定连接。
83.如图7所示,所述旋进螺母504在螺杆503上所处的位置包括靠近门体200侧的开门位置511、远离门体200侧的关门位置512、以及位于开门位置511和关门位置512之间的初始位置513。
84.进一步地,所述第二开门机构500还包括用于检测旋进螺母504在螺杆503上所处的位置信息的电磁式传感器。所述电磁式传感器包括:永磁体转子,所述永磁体转子设置在旋进螺母504上;电磁传感器,所述电磁传感器对应永磁体转子设置,具有能够感应到永磁体转子的感应区。
85.所述电磁传感器可以对应设置在螺杆503支架510上,与永磁体转子的位置相对应。所述电磁传感器设置在所述支撑基板5101上。优选地,所述位置传感器包括三个,分别对应所述开门位置511、关门位置512、初始位置513设置在支撑基板5101上。
86.所述第一开门机构400设置于箱体100的上部,所述第二开门机构500设置于箱体100的下部。箱体100的底部固定设置有转动轴514,门体200通过铰链509可转动地连接在转动轴514上;所述红外感应装置设置在门体200下部的箱体100上。
87.实施例二
88.如图8所示,本实施例是在上述实施例的基础上陈述该自动开门装置或应用该自动开门装置的消毒柜的控制方法。该控制方法包括:
89.步骤s20:接收开门信号,控制第一开门机构400将门体200弹出至第一预设角度。
90.步骤s40:在门体200弹开后,控制第二开门机构500启动将门体200打开至第二预
设角度。
91.如图9所示,该控制方法还包括自动关门步骤:步骤s60:接收关门信号,控制第二开门机构500关闭门体200。
92.优选地,红外感应装置或语音控制装置接收关门信号,控制模块控制驱动模块驱动旋进螺母504向关门位置512移动,直至旋进螺母504移动至关门位置512停止驱动,关闭门体200。
93.以上所述仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专利的技术人员在不脱离本发明技术方案范围内,当可利用上述提示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明方案的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。