技术特征:
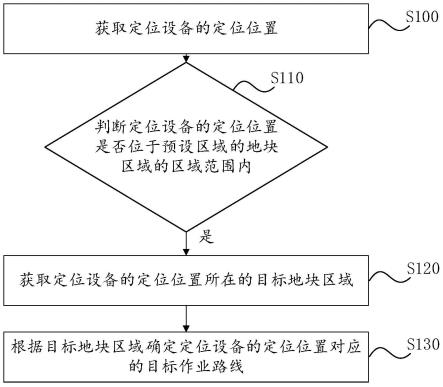
1.一种作业路线生成方法,其特征在于,所述方法应用于服务器,包括:获取定位设备的定位位置;判断所述定位设备的定位位置是否位于预设区域的区域范围内;其中,所述预设区域包括预存的多个地块区域,每个地块区域为相应区域范围的所有定位位置的集合;若所述定位设备的定位位置位于所述预设区域的地块区域的区域范围中,则获取所述定位设备的定位位置所在的目标地块区域;根据所述目标地块区域确定所述定位设备的定位位置对应的目标作业路线。2.根据权利要求1所述的方法,其特征在于,所述根据所述目标地块区域确定所述定位设备的定位位置对应的目标作业路线,包括:获取所述目标地块区域对应的多条历史作业路线;其中,每个地块区域的历史作业路线通过自动作业驾驶设备在对应的地块区域作业时上传获得;根据所述多条历史作业路线确定所述定位设备的定位位置对应的目标作业路线。3.根据权利要求2所述的方法,其特征在于,所述根据所述多条历史作业路线确定所述定位设备的定位位置对应的目标作业路线,包括:将多条历史作业路线中,上传时间距离当前时间最近的作业路线作为所述目标作业路线。4.根据权利要求2所述的方法,其特征在于,所述根据所述多条历史作业路线确定所述定位设备的定位位置对应的目标作业路线,包括:将所述多条历史作业路线发送给所述定位设备对应的终端设备;其中,所述定位设备对应的终端设备包括与所述定位设备进行通信连接或电连接的终端设备;接收所述终端设备在多条历史作业路线中选择的历史路线;将所述终端设备选择的历史路线作为所述目标作业路线。5.根据权利要求1所述的方法,其特征在于,在所述判断所述定位设备的定位位置是否在预设区域的区域范围内之后,所述方法还包括:若所述定位设备的定位位置没有位于所述预设区域的区域范围内,则获取所述定位设备的定位位置预设距离内的所有历史作业路线;根据所述定位设备的定位位置预设距离内的所有历史作业路线确定所述目标作业路线。6.根据权利要求5所述的方法,其特征在于,所述根据所述定位设备的定位位置预设距离内的所有历史作业路线确定所述目标作业路线,包括:将所述定位设备的定位位置预设距离内的所有历史作业路线中,上传时间距离当前时间最近的历史作业路线作为所述目标作业路线。7.根据权利要求5所述的方法,其特征在于,所述根据所述定位设备的定位位置预设距离内的所有历史作业路线确定所述目标作业路线,包括:将所述定位设备的定位位置预设距离内的所有历史作业路线发送给所述定位设备对应的终端设备;其中,所述定位设备对应的终端设备为与所述定位设备进行通信连接或电连接的终端设备;接收所述终端设备在多条历史作业路线中选择的历史路线;将所述终端设备选择的历史路线作为所述目标作业路线。
8.根据权利要求1-7中任一项所述的方法,其特征在于,在获得目标作业路线之后,所述方法还包括:将所述目标作业路线发送给所述定位设备对应的自动作业驾驶设备,以使所述自动作业驾驶设备根据所述目标作业路线进行作业;其中,每一定位设备与一自动作业驾驶设备绑定,不同的定位设备绑定的自动作业驾驶设备不同。9.一种作业路线获取方法,其特征在于,所述方法应用于终端设备,所述方法包括:获取定位设备的当前位置,其中,所述终端设备与所述定位设备通信连接或电连接;将所述定位设备的当前位置发送给服务器;接收所述服务器返回的目标作业路线;其中,所述目标作业路线的路线信息通过所述服务器执行权利要求1-8中任一项所述的作业路线生成方法获得;将所述目标作业路线上传到自动作业驾驶设备中,以使所述自动作业驾驶设备根据所述目标作业路线进行作业;其中,所述终端设备与所述自动作业驾驶设备通信连接或电连接。10.根据权利要求9所述的方法,其特征在于,所述接收所述服务器返回的目标作业路线,包括:接收所述服务器返回的多条历史作业路线信息;基于用户选择操作,在所述多条历史作业路线中选择一条历史作业路线,并将选择的历史作业路线发送给所述服务器;获取所述服务器返回的所述终端设备选择的历史作业路线的路线信息,以获得所述目标作业路线。
技术总结
本申请提供一种作业路线生成方法及获取方法。在本申请提供的作业路线生成方法中,首先将农业耕地分为多个地块区域,记录每个地块区域历史作业路线并存储在数据库中,在此基础上,获取上传的定位设备的定位位置,在定位位置所在地块区域的历史作业路线中确定目标作业路线;若定位位置没在存储的地块区域中,则根据定位位置附近的历史作业路线确定目标作业路线,进而传输到自动驾驶作业设备中,使得自动驾驶作业设备根据目标作业路线进行自动作业。采用该作业路线生成方法无需每次采用拖拉机定基准路线,提高耕地作业的效率,并且不会对土地造成碾压,提高农作物收成。提高农作物收成。提高农作物收成。
技术研发人员:冯绍晰 沈雪峰 黄飞
受保护的技术使用者:上海华测导航技术股份有限公司
技术研发日:2022.08.31
技术公布日:2022/12/12
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。