1.本发明涉及预制混凝土箱梁安装技术领域,具体地说是一种基于元宇宙的预制混凝土箱梁精准安装方法。
背景技术:
2.随着科学技术的发展,混凝土梁桥的应用日益成熟,在施工技术方面,预制安装法被发明出来并被作为一种常用的施工方法应用于土木行业中,这种具有科学性和现代化特征的施工方法可以更好地保证施工质量,减少现场因素对桥梁施工的影响。但由于混凝土箱梁桥在安装时需要对混凝土进行拼接,存在安装不精确,整体性不好等问题,施工精度在施工现场难以保证。
3.元宇宙作为新时代的浪潮被展现在人们眼前,是一门尚未成熟的具有时代意义的新兴技术,具有时空性,真实性,独立性,连接性等特点,该技术暂时更多地处于概念阶段,现有载体基本为vr与ar即虚拟现实技术及增强现实技术。而元宇宙思想核心是基于5g网络,人工智能,物联网,云计算,大数据等新兴技术发展,基础设施的普及和水平提升,将元宇宙的概念从虚拟应用到现实,从而为工业增加驱动力,推动实体经济的发展。
4.元宇宙与传统工业的结合在目前阶段相对薄弱,现有的元宇宙中的vr与ar技术作为现存的高新技术,需要反作用于现实的建筑行业,从而促进相互之间的发展。传统的预制混凝土安装施工技术,由于存在工厂预制,运输安装等不确定性的影响,难以做到高精度的精准安装,有限元分析软件也不能模拟现场的实际安装情况。
技术实现要素:
5.本发明要解决的技术问题是针对上述现有技术的不足,而提供一种基于元宇宙的预制混凝土箱梁精准安装方法,该方法将安装过程中的不确定因素可视化,保证预制混凝土箱梁从工厂预制到现场安装可以做到全过程指导,用电子信息的方式实现数据传递于分析,极大提高工作效率与安装精度,减小了不确定的施工风险,增大安全性并且保证施工质量。
6.为解决上述技术问题,本发明采用的技术方案是:一种基于元宇宙的预制混凝土箱梁精准安装方法,包括以下步骤:步骤1,在工厂预制时,依据箱梁连接接口作为定位点,利用三维激光扫描技术对预制箱梁构件进行扫描,将预制箱梁构件模型信息导入中央处理器中,得到预制箱梁构件模型;步骤2,根据现场的实际桥梁,利用三维激光扫描技术对除箱梁构件外的实际桥梁进行扫描,得到除箱梁构件外的实桥模型;步骤3,将预制箱梁构件模型与除箱梁构件外的实桥模型结合,并应用非线性有限元软件验证结合后的完整实桥模型的力学性能;步骤4,预制箱梁构件经历运输工序从工厂到达现场,通过在现场配置的ar设备,
对预制箱梁构件与预制箱梁构件模型进行同步与对比,将预制箱梁构件模型的几何协调条件与运输工程中产生的变形相拟合;步骤5,吊装预制箱梁构件时,实时利用ar技术监控跟踪安装过程并处理影像,将ar运算体现出的实时最适合安装位置显示于ar设备的显示器上,调整预制箱梁构件的吊装位置,从而使得预制箱梁构件精准安装在实际桥梁上。
7.作为本发明进一步优选地,步骤1中,在工厂预制时,利用三维激光扫描技术对预制箱梁构件进行扫描,得到预制箱梁构件模型信息,将预制箱梁构件模型信息导入中央处理器中,从而完成对预制混凝土箱梁的建模;将预制箱梁构件模型与设计图纸进行对比,能验证预制构件制作的精准性并消除现场预制与工程设计图纸之间的误差。
8.作为本发明进一步优选地,步骤4中,对工厂预制、运输到现场的预制箱梁构件使用利用三维激光扫描技术多次扫描,检测预制箱梁构件在运输中产生的变形和细小裂缝,保证预制箱梁构件能通过几何协调条件拟合现有构件的安装曲线,并得到应力、线型的最优解,避免预制箱梁构件在安装时发生细小位移和安装偏差。
9.作为本发明进一步优选地,步骤5中,利用摄像头多角度全面拍摄预制箱梁构件,并利用三维跟踪注册技术追踪吊装中的预制箱梁构件,将摄影所得图像显示到ar设备的显示器上,并且将其与ar显示器中的扫描吊装模型进行叠加显示,指挥预制箱梁构件按照扫描系统与中央处理器计算下得到的最优安装曲线进行安装。
10.作为本发明进一步优选地,在工厂预制时通过导入三维激光扫描的数据直接得到预制箱梁构件模型,并且在预制箱梁构件运输到吊装现场后,根据几何协调条件消除构件在运输过程中由于变形与裂缝等产生的误差。
11.预制箱梁构件安装时,预制箱梁构件模型经过处理器处理后将最优安装曲线与安装位置显示在ar设备的显示器上并对实际正在吊装的预制箱梁构件进行实时监控跟踪,完成影像的动态模拟,在安装时清晰描绘出预制箱梁构件安装的三维位置和安装角度。
12.作为本发明进一步优选地,中央处理器以扫描所得预制箱梁构件模型为中心,通过二次开发与录入数据,将现场分析出的结果反应在ar显示器上,并将理论安装位置以虚线显示。
13.三维跟踪实际预制箱梁构件,并将当前预制箱梁构件应处的理论位置以透明实线显示,从而指挥实际预制箱梁构件移动并与理论安装路径叠加;位置的误差变化通过颜色表示,当预制箱梁构件处于理论位置时,以绿色表示;存在偏差时以黄色表示;完全分离时以红色表示并发出报警。
14.本发明具有如下有益效果:1. 本发明是基于预制混凝土箱梁的性质,其构件以模块化形式分阶段于工厂预制;根据其特性在每一个构件预制出厂时通过三维激光扫描建模;随后在构件运输至现场时,对构件进行不同角度、不同设备、相同算法的扫描,通过编程,在有限元分析软件中对模型加入变形协调条件,使得构件在发生变形等情况时能够按照实际情况进行拟合;进行拟合后,重新计算出构件的安装设计值,当构件变形过大无法拟合时发出警告;最后,在现场多角度配置多台与ar设备相连接的摄像机,监控实际吊装情况并实时将信息传递到中央处理器进行处理,直接指出与理论值存在的误差并将调整后的数据传递回ar显示器进行报警,并将报警数据下达至建设、施工、监理单位,保证桥梁建设的安全性和安装精度的可靠
性。
15.2.本发明将安装过程中的不确定因素可视化,保证预制混凝土箱梁从工厂预制到现场安装可以做到全过程指导,用电子信息的方式实现数据传递于分析,极大提高工作效率与安装精度,减小了不确定的施工风险,增大安全性并且保证施工质量。
16.3.本发明通过元宇宙概念尤其是ar技术二次开发和图片识别处理功能提供的预制混凝土箱梁精准安装思路,适用于所有预制安装的桥梁。
附图说明
17.图1是本发明的一种基于元宇宙的预制混凝土箱梁精准安装方法的流程图。
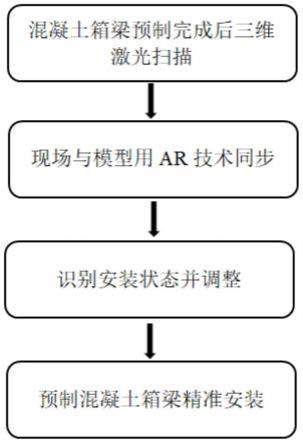
18.图2是本发明的一种基于元宇宙的预制混凝土箱梁精准安装方法的结构原理图。
具体实施方式
19.下面结合附图和具体较佳实施方式对本发明作进一步详细的说明。
20.本发明通过元宇宙概念尤其是ar技术二次开发和图片识别处理功能提供的预制混凝土箱梁精准安装思路,适用于所有预制安装的桥梁。
21.本发明的原理是基于预制混凝土箱梁的性质,其构件以模块化形式分阶段于工厂预制。根据其特性在每一个构件预制出厂时通过三维激光扫描建模。随后,在构件运输至现场时,对构件进行不同角度、不同设备、相同算法的扫描,通过编程,在有限元分析软件中对模型加入变形协调条件,使得构件在发生变形等情况时能够按照实际情况进行拟合。由于混凝土构件的变形用肉眼无法识别,现场扫描就十分重要。进行拟合后,重新计算出构件的安装设计值,当构件变形过大无法拟合时发出警告。最后,在现场多角度配置多台与ar设备相连接的摄像机,监控实际吊装情况并实时将信息传递到中央处理器进行处理,直接指出与理论值存在的误差并将调整后的数据传递回ar显示器。
22.如图1所示,一种基于元宇宙的预制混凝土箱梁精准安装方法,具体包括以下步骤:步骤1,在工厂预制时,依据箱梁连接接口作为定位点,利用三维激光扫描技术对预制箱梁构件进行扫描,将预制箱梁构件模型信息导入中央处理器中,得到预制箱梁构件模型;在工厂预制时,利用三维激光扫描技术对预制箱梁构件进行扫描,得到预制箱梁构件模型信息,将预制箱梁构件模型信息导入中央处理器中,从而完成对预制混凝土箱梁的建模;将预制箱梁构件模型与设计图纸进行对比,能验证预制构件制作的精准性并消除现场预制与工程设计图纸之间的误差。
23.步骤2,根据现场的实际桥梁,利用三维激光扫描技术对除箱梁构件外的实际桥梁进行扫描,得到除箱梁构件外的实桥模型;步骤3,将预制箱梁构件模型与除箱梁构件外的实桥模型结合,并应用非线性有限元软件验证结合后的完整实桥模型的力学性能;步骤4,预制箱梁构件经历运输工序从工厂到达现场,通过在现场配置的ar设备,对预制箱梁构件与预制箱梁构件模型进行同步与对比,将预制箱梁构件模型的几何协调条件与运输工程中产生的变形相拟合;
对工厂预制、运输到现场的预制箱梁构件使用利用三维激光扫描技术多次扫描,检测预制箱梁构件在运输中产生的变形和细小裂缝,保证预制箱梁构件能通过几何协调条件拟合现有构件的安装曲线,并得到应力、线型的最优解,避免预制箱梁构件在安装时发生细小位移和安装偏差。
24.步骤5,吊装预制箱梁构件时,实时利用ar技术监控跟踪安装过程并处理影像,将ar运算体现出的实时最适合安装位置显示于ar设备的显示器上,调整预制箱梁构件的吊装位置,从而使得预制箱梁构件精准安装在实际桥梁上。
25.利用摄像头多角度全面拍摄预制箱梁构件,并利用三维跟踪注册技术追踪吊装中的预制箱梁构件,将摄影所得图像显示到ar设备的显示器上,并且将其与ar显示器中的扫描吊装模型进行叠加显示,指挥预制箱梁构件按照扫描系统与中央处理器计算下得到的最优安装曲线进行安装。
26.在工厂预制时通过导入三维激光扫描的数据直接得到预制箱梁构件模型,并且在预制箱梁构件运输到吊装现场后,根据几何协调条件消除构件在运输过程中由于变形与裂缝等产生的误差。
27.预制箱梁构件安装时,预制箱梁构件模型经过处理器处理后将最优安装曲线与安装位置显示在ar设备的显示器上并对实际正在吊装的预制箱梁构件进行实时监控跟踪,完成影像的动态模拟,在安装时清晰描绘出预制箱梁构件安装的三维位置和安装角度。
28.中央处理器以扫描所得预制箱梁构件模型为中心,通过二次开发与录入数据,将现场分析出的结果反应在ar显示器上,并将理论安装位置以虚线显示。
29.三维跟踪实际预制箱梁构件,并将当前预制箱梁构件应处的理论位置以透明实线显示,从而指挥实际预制箱梁构件移动并与理论安装路径叠加;位置的误差变化通过颜色表示,当预制箱梁构件处于理论位置时,以绿色表示;存在偏差时以黄色表示;完全分离时以红色表示并发出报警。
30.当出现现场突发状况或构件运输过程中产生较大变形导致无法拟合时,不仅需要对监控进行报警,并将报警数据下达至建设、施工、监理单位,保证桥梁建设的安全性和安装精度的可靠性。
31.本发明在架设预制箱梁桥的过程中,消除了预制、运输、装配等带来的误差,控制尺寸精度,改变了现有预制混凝土箱梁装配精度控制发现晚、控制难的现状,解决了装配式混凝土箱梁桥由于混凝土收缩徐变、预应力以及温度等因素引起各预制梁变形不同导致各安装梁线型不一致安装困难的问题。
32.以上详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。