技术特征:
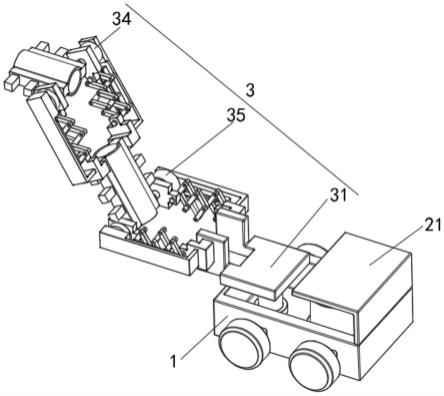
1.一种基于物联网的远程控制消防机器人,包括车体(1),其特征在于:所述车体(1)的右部上侧固定连接有稳固装置(2),所述车体(1)的左部内侧底壁固定连接有架水炮装置(3),所述架水炮装置(3)的外侧固定安装有调节装置(4),所述调节装置(4)上设置有检测装置(5)和夹紧装置(6);所述稳固装置(2)包括连接板(21)、电动伸缩杆(22)、吸筒(23)、第一线圈(24)、第一弹簧(25)和磁力块(26),所述车体(1)的右部上侧固定连接有连接板(21),所述连接板(21)的下侧固定连接有电动伸缩杆(22),所述电动伸缩杆(22)的下侧固定连接有吸筒(23),所述吸筒(23)的内部上侧壁固定连接有第一线圈(24),所述吸筒(23)的内侧滑动连接有磁力块(26),所述第一线圈(24)与磁力块(26)之间固定连接有第一弹簧(25)。2.根据权利要求1所述的一种基于物联网的远程控制消防机器人,其特征在于:所述架水炮装置(3)包括固定台(31)、第一套筒(32)、第二套筒(33)、第一电机(34)和第二电机(35),所述车体(1)的左部内侧底壁固定连接有固定台(31),所述固定台(31)的左上侧设置有第二电机(35),所述第二电机(35)的前侧传动连接有第一套筒(32),所述第二电机(35)的左侧上侧设置有第一电机(34),所述第一电机(34)的前侧传动连接有第二套筒(33)。3.根据权利要求2所述的一种基于物联网的远程控制消防机器人,其特征在于:所述调节装置(4)包括第一固定块(41)、连杆组(42)、第二固定块(43)、固定板(44)和运动装置(45),所述第一套筒(32)、第二套筒(33)的外侧均转动连接有第二固定块(43),所述第一套筒(32)、固定台(31)的外侧均固定连接有第一固定块(41),所述第一固定块(41)远离第一套筒(32)中心的一侧固定连接有固定板(44),所述第二固定块(43)与第一固定块(41)之间转动连接有连杆组(42),所述连杆组(42)远离第一套筒(32)中心的一侧固定连接有运动装置(45)。4.根据权利要求3所述的一种基于物联网的远程控制消防机器人,其特征在于:所述运动装置(45)的结构包括轨道块(451)、滑动磁块(452)、第二线圈(453)和第二弹簧(454),所述连杆组(42)远离第一套筒(32)中心的一侧固定连接有滑动磁块(452),所述滑动磁块(452)的外侧滑动连接有轨道块(451),所述轨道块(451)与固定板(44)为固定连接,所述轨道块(451)的内侧壁固定连接有第二线圈(453),所述滑动磁块(452)与第二线圈(453)之间固定连接有第二弹簧(454)。5.根据权利要求3所述的一种基于物联网的远程控制消防机器人,其特征在于:所述检测装置(5)包括拨动块(51)、连接盖(52)、隔绝块(53)和弧形滑动变阻器(54),所述第二固定块(43)远离第一套筒(32)中心的一侧固定连接有连接盖(52),所述连接盖(52)的轴向内侧固定连接有隔绝块(53)、弧形滑动变阻器(54),所述隔绝块(53)、弧形滑动变阻器(54)的轴向内侧滑动连接有拨动块(51)。6.根据权利要求5所述的一种基于物联网的远程控制消防机器人,其特征在于:所述夹紧装置(6)包括矩形壳体(61)、第三线圈(62)、第三弹簧(63)、磁力杆(64)和夹紧块(65),所述第一套筒(32)、第二套筒(33)的外侧均固定连接有矩形壳体(61),所述矩形壳体(61)的内侧壁固定连接有第三线圈(62),所述矩形壳体(61)的内侧滑动连接有磁力杆(64),所述磁力杆(64)远离第三线圈(62)的一侧固定连接有夹紧块(65),所述第三线圈(62)与磁力杆(64)之间固定连接有第三弹簧(63),所述弧形滑动变阻器(54)与第三线圈(62)为电性连接。
7.根据权利要求5所述的一种基于物联网的远程控制消防机器人,其特征在于:所述弧形滑动变阻器(54)与第一线圈(24)为电性连接,所述车体(1)的外侧转动连接有分布均匀的驱动轮,所述第一线圈(24)通入电流后产生与磁力块(26)相吸的磁力,所述车体(1)上开设有与吸筒(23)相对应的通孔。8.根据权利要求6所述的一种基于物联网的远程控制消防机器人,其特征在于:所述夹紧块(65)在第一套筒(32)、第二套筒(33)上均匀分布,所述夹紧块(65)贯穿第一套筒(32)、第二套筒(33),且伸入到第一套筒(32)、第二套筒(33)的内部,所述第一套筒(32)、第二套筒(33)的管径相一致。9.根据权利要求5所述的一种基于物联网的远程控制消防机器人,其特征在于:所述拨动块(51)设置有两个,所述拨动块(51)分别与第一套筒(32)、第二套筒(33)固定连接,所述弧形滑动变阻器(54)与第二线圈(453)为电性连接,所述固定板(44)的另一端与连接盖(52)为固定连接,所述第二电机(35)的功率大于第一电机(34)。
技术总结
本发明涉及消防机器人技术领域,且公开了一种基于物联网的远程控制消防机器人,包括车体,所述稳固装置包括连接板、电动伸缩杆、吸筒、第一线圈、第一弹簧和磁力块,所述车体的右部上侧固定连接有连接板,所述连接板的下侧固定连接有电动伸缩杆,所述电动伸缩杆的下侧固定连接有吸筒,所述吸筒的内部上侧壁固定连接有第一线圈,所述吸筒的内侧滑动连接有磁力块。该基于物联网的远程控制消防机器人,通过电动伸缩杆、吸筒、第一套筒、第二套筒、第一线圈、弧形滑动变阻器、磁力块和第一弹簧之间的配合作用,进而实现了车体与地面之间的固定力跟随第一套筒、第二套筒的转动角度呈正向关系的目的,从而解决了具有安全隐患的问题。从而解决了具有安全隐患的问题。从而解决了具有安全隐患的问题。
技术研发人员:张梅
受保护的技术使用者:深圳市派安科技有限公司
技术研发日:2022.07.27
技术公布日:2022/12/12
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。