1.本发明属于电机部件装配技术领域,具体涉及一种基于神经网络的转子压环的压装方法和系统。
背景技术:
2.电机是目前新能源行业研究的热点话题,电机以其体积小、重量轻、功率大等优点被广泛用于与各个领域。电机相对于传统的燃油发动机,具有驱动效能更高、能量转换过程清洁无污染和噪声小等优点。电机转子是电机的重要组成部件,转子压环起到固定硅钢叠长的作用。由于转子压环与转轴是过盈配合关系,在装配转子过程中需要压装工具将压环压进转轴,目前主要压装步骤是:首先通过转轴和压环的三维模型仿真分析得出压机所需压装力,其次通过仿真压装力作为参考值,最后人工调整压机进行压装转轴和压环的装配过程。人工操作压机压装压环的过程操作精度很难达到量化,压装完成的参评精度达不到量化精度,同时装配过程的精度完全与操作者的经验有关,装配效率低下,不合格率较高。且对新品转轴和压环的研究和装配,该压装力的仿真周期较长。
技术实现要素:
3.为了提高转子压环的装配效率和合格率,缩短新品的装配周期,本发明提出一种基于深度学习方法的转子压环的压装方法和系统。
4.实现本发明目的之一的基于神经网络的转子压环的压装方法,包括如下步骤:
5.s1、获取压装工装操作台上的转子转轴和压环基本参数;
6.s2、将获取的基本参数输入到深度神经网络回归模型中,得到预测的压装力,并将预测的压装力施加于操作台压头,对转子压环进行压装。
7.进一步的技术方案包括:所述步骤s2中还包括:在操作台压头下压的过程中,采集压环下移的位移数据。
8.进一步的技术方案包括:所述步骤s2中还包括:根据采集的压环下移的位移数据调整操作台压头的压装力大小使得压环匀速下移。
9.更进一步的技术方案包括:获取压环下移的位移数据,当压环下移位移等于0时,增大作用于压头液压驱动装置的驱动信号以增大压头压装力;当压环有下移量时,电控单元判断压环是否是匀速下移;若是加速下移则电控单元减小作用于压头液压驱动装置的驱动信号以减小压头压装力。
10.进一步的技术方案包括:所述步骤s2后还包括:在操作台压头下压的过程中,存储此次转子转轴和压环的初始数据和对应的压装力大小,并将存储数据加入所述深度神经网络回归模型的训练集中。
11.进一步的技术方案包括:所述转子转轴和压环基本参数包括:转子转轴外径、压环内径、压环外径、压环厚度、转子转轴材料、压环材料。
12.实现本发明目的之二的基于神经网络的转子压环的压装系统,包括:数据采集子
系统和电控单元ecu;所述数据采集子系统用于获取转子转轴和压环的基本参数;所述电控单元ecu用于将数据采集子系统获取的基本参数输入到基于深度学习方法的深度神经网络回归模型中,并从所述模型中得到该模型预测的压装力,并将该压装力施加于操作台压头,对转子压环进行压装。
13.进一步的技术方案包括:所述数据采集子系统包括压环位移速度采集模块,用于采集压环下移的位移数据。
14.进一步的技术方案包括:所述电控单元ecu还用于根据压环位移速度采集模块采集的压环下移的位移数据控制操作台压头的压装力大小,使得压环匀速下移。
15.进一步的技术方案包括:所述数据采集子系统包括内外径采集模块,用于获取转子转轴和/或压环的内径和/或外径;所述采集方式在本发明中不作限定,只要能获取到转子转轴和/或压环的内径和/或外径都适用于本发明。
16.有益效果:
17.缩短电机生产装配过程的周期,提高装配合格率,进而达到降本人工成本和不合格率的次品损耗,实现电机智能化和高效化生产。
附图说明
18.图1是本发明所述方法的实施例的流程示意图;
19.图2是压装力预测流程图;
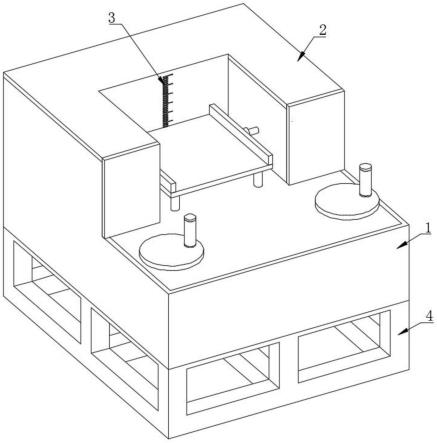
20.图3是本发明所述系统的示意图;
21.图中:1-压环内外径尺寸测量传感器、2-压头、3-压环、4-转轴、5-上隔磁板、6-叠长、7-下隔磁板、8-质量传感器、9-左固定台、10-滑槽、11-右固定台、12-左固定台液压驱动装置、13-压环与上隔磁板位置传感器、14-压环位移速度传感器、15-压环厚度传感器、16-转轴外径尺寸测量传感器、17-电控单元ecu、18-压头液压驱动装置、19-液压控制台、20-人机交互界面、21-压头压环位置传感器。
22.图4是本发明所述转子转轴的平面示意图;
23.图中:1-转子转轴外径。
24.图5是本发明所述压环的三视图示意图;
25.图中:2-压环内径、3-压环外径、4-压环厚度。
具体实施方式
26.下列具体实施方式用于对本发明权利要求技术方案的解释,以便本领域的技术人员理解本权利要求书。本发明的保护范围不限于下列具体的实施结构。本领域的技术人员做出的包含有本发明权利要求书技术方案而不同于下列具体实施方式的也是本发明的保护范围。
27.下面结合附图1~5讲述本发明的实施例。
28.步骤1、基于深度学习方法建立用于预测压装力的深度神经网络回归模型;其中模型的输入参数包括:转子转轴外径、压环内径、压环外径、压环厚度、转子转轴材料、压环材料;输出参数为压装力;其中,转子转轴外径如图4所示,压环内径、压环外径、压环厚度如图5所示,在本实施例中转子转轴外径、压环内径、压环外径和压环厚度通过传感器获取,但不
限于此方式,也可以通过其它方式获取;转子转轴材料和压环材料包括铸铁、45#钢。
29.步骤2、采用逐层贪心方法,利用仿真转子压环的压装力的历史数据对上述步骤建立的用于预测压装力的深度神经网络回归模型进行训练,通过所述模型的非线性映射功能,学习得到所述模型的序列之间的映射关系,最后得到训练完成的深度神经网络回归模型;本实施例中的仿真转子压环的压装力的历史数据来源于cae仿真;
30.步骤3、利用步骤2中训练完成的深度神经网络回归模型,对转子压环进行装配;方法具体如下:
31.1、操作台通电,将转子转轴和压环置于压装工装操作台上;
32.具体地,将需要压装的转子,即压环3、转轴4、上隔磁板5、叠长6、下隔磁板7,置于压装台上,压环3朝上放置且靠近于压头2,下隔磁板7与左固定台9和右固定台11上端面接触,转轴4置于左固定台9和右固定台11之间的卡槽;启动液压控制台19控制并手动控制,驱动左固定台液压驱动装置12使左固定台9在滑槽10左右移动,直至固定转轴4。
33.2、启动电控单元ecu 17,在人机交互界面20选择压环3和转轴4的材料,当转子没有放置于操作台时质量传感器8检测信号为0,电控单元ecu 17进行计时功能,在30分钟内都未检测到操作台质量大于0就关闭程序,结束本次操作;当转子放置于操作台时,质量传感器8将质量大于0的信号传递给电控单元ecu 17,ecu收到此信息号表明转子已经安装固定于工作台;
34.3、压环内外径尺寸测量传感器1测量压环3的内径尺寸和外径尺寸、压环厚度传感器15测量压环厚度尺寸、转轴外径尺寸传感器16测量转轴外径尺寸,电控单元ecu 17获取选择的材料、采集压环内外径尺寸测量传感器1、测量压环厚度传感器15和转轴外径传感器16的信号控制压机压装压环;
35.在另一个实施例中,还可通过人机交互界面输入转子转轴外径、压环内径、压环外径和压环厚度;
36.在另一个实施例中,还可通过无接触识别技术获取压环和转子转轴外径、压环内径、压环外径和压环厚度;
37.4、电控单元ecu 17读取多个传感器采集的转子转轴外径、压环内径、压环外径、压环厚度以及选择的转子转轴材料、压环材料,并将其输入到步骤2中训练完成的深度神经网络回归模型中,深度神经网络回归模型输出压装力的预测值,电控单元ecu 17读取模型输出压装力的预测值并通过控制压头液压驱动装置18,将读取到的仿真压装力施加给压头2并驱动压头2匀速下压;压头压环位置传感器21将测量的信号传递给电控单元ecu 17,电控单元ecu 17判断压头2和压环3已经接触;
38.5、压环位移速度传感器14将采集信号传递给电控单元ecu 17,当压环下移位移等于0时,表明压装力不足以压装压环3,此时电控单元ecu 17增大驱动信号作用于压头液压驱动装置18,增大压头压装力;当压环3有下移量时,电控单元ecu 17进一步判断压环3是否是匀速下移,若是加速下移,电控单元ecu 17减小驱动信号作用于压头液压驱动装置18,降低驱动装置,若是匀速则表明压装力等于压环和转轴的摩擦力,此时压机以最小功率推动压环3下压;压环和上隔磁板距离传感器13将信号传递给电控单元ecu 17,电控单元ecu 17判定压环3和上隔磁板5是否接触,若未接触,保持当前压装力继续下压;若接触,表明压环3已经压装至指定位置。压头退回至初始位置,系统提示压装完成语音;
39.6、电控单元ecu 17保存此次材料信息、压环内径尺寸传感器1、压环厚度测量传感器15、转轴外轴测量传感器16采集的信息,压环3最终匀速下移时压头2施加的压装力信息,并将存储数据添加到上述深度神经网络回归模型的训练数据中,提高下次压装力的预测精度,提高实际压装力的压装效率。
40.应理解,上述实施例中各步骤的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本技术实施例的实施过程构成任何限定。
41.本技术实施例还包括一个基于深度学习方法的转子压环的压装系统,包括数据采集子系统和电控单元ecu;数据采集子系统用于获取转子转轴和压环的基本参数;电控单元ecu用于将数据采集子系统获取的基本参数输入到基于深度学习方法的深度神经网络回归模型中,并从所述模型中得到该模型预测的压装力,并将该压装力施加于操作台压头,对转子压环进行压装。
42.在另一个实施例中,数据采集子系统包括压环位移速度采集模块,用于采集压环下移的位移数据。
43.在另一个实施例中,电控单元ecu还用于根据压环位移速度传感器采集的压环下移的位移数据控制操作台压头的压装力大小,使得压环匀速下移。
44.在另一个实施例中,数据采集子系统包括内外径采集模块,用于获取转子转轴和/或压环的内径和/或外径。所述采集模块可以通过传感器获取,也可以通过其它方式获取,在此不作限定。
45.本说明书未作详细描述的内容属于本领域专业技术人员公知的现有技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。