1.本技术涉及电动位移台领域,具体而言,涉及一种波导定位用六轴电动位移台。
背景技术:
2.电动平移台因其高精度、可控性强和性能稳定等优点,在光学对准、光纤器件生产和自动化设备等领域有着广泛的应用,但在相关的电动平移台技术中,电动平移台上的滑台缺乏对物体进行夹持固定结构,在滑台进行移动时,放置于滑台上的物体容易发生晃动,非常不利于使用。
技术实现要素:
3.为了弥补以上不足,本技术提供了一种波导定位用六轴电动位移台,旨在改善电动平移台上的滑台缺乏对物体进行夹持固定结构的问题。
4.本技术实施例提供了一种波导定位用六轴电动位移台,包括电动位移台本体和夹持组件。
5.所述电动位移台本体的上表面设置有滑动台,所述滑动台的一侧安装有第一限位件,所述滑动台的另一侧安装有第二限位件。
6.所述夹持组件包括第一固定板、第一螺纹杆、第一夹板、第二固定板、第二螺纹杆和第二夹板,所述第一固定板的板体滑动插接于所述滑动台的内部,所述第一限位件的一端滑动插接于所述第一固定板的内部,所述第一螺纹杆螺纹贯穿于所述第一固定板的板体,所述第一夹板的一面与所述第一螺纹杆的一端转动连接,所述第二固定板滑动插接于所述滑动台的内部,所述第二限位件的一端滑动插接于所述第二固定板的内部,所述第二螺纹杆螺纹贯穿于所述第二固定板的板体,所述第二夹板的一面与所述第二螺纹杆的一端转动连接,所述第二夹板与所述第一夹板对应设置。
7.在上述实现过程中,可将需要进行移动的物体放置于滑动台上,然后便可旋转第一螺纹杆和第二螺纹杆,使第一螺纹杆带动第一夹板向第二夹板移动,使第二螺纹杆带动第二夹板向第一夹板移动,进而便可使第二夹板和第一夹板对滑动台上的物体进行夹持固定,不需要使用夹持组件时,将第一限位件抽出第一固定板内部后,便可将第一固定板与滑动台分离,将第二限位件抽出第二固定板内部后,便可将第二固定板与滑动台分离,可使用第二夹板和第一夹板对滑动台上的物体进行夹持固定,可提高物体的稳定性,当滑动台移动时物体不易发生晃动,非常有利于使用。
8.在一种具体的实施方案中,所述滑动台的上表面开设有第一限位插槽,所述第一固定板的板体滑动插接于所述第一限位插槽的内部。
9.在一种具体的实施方案中,所述第一限位件包括第一连接板、第一弹性件和第一限位杆,所述第一弹性件的一端与所述滑动台的一侧固定连接,所述第一连接板的一面与所述第一弹性件的另一端固定连接,所述第一限位杆的一端与所述第一连接板的一面固定连接,所述第一限位杆的杆体滑动贯穿于所述第一限位插槽的槽壁,所述第一限位杆的另
一端滑动插接于所述第一固定板的内部,所述第一限位杆与所述第一固定板相抵紧。
10.在一种具体的实施方案中,所述第一限位杆设置有若干根,若干根所述第一限位杆的一端均与所述第一连接板的一面固定连接,若干根所述第一限位杆均匀的呈圆周分布,若干根所述第一限位杆的杆体均滑动贯穿于所述第一限位插槽的槽壁,若干根所述第一限位杆的另一端均滑动插接于所述第一固定板的内部,若干根所述第一限位杆均与所述第一固定板相抵紧。
11.在一种具体的实施方案中,所述滑动台的上表面开设有第二限位插槽,所述第二限位插槽与所述第一限位插槽对应设置,所述第二固定板的板体滑动插接于所述第二限位插槽的内部。
12.在一种具体的实施方案中,所述第二限位件包括第二连接板、第二弹性件和第二限位杆体,所述第二弹性件的一端固定连接于所述滑动台远离所述第一弹性件的一侧,所述第二连接板的一面固定连接于所述第二弹性件的另一端,所述第二限位杆体的一端与所述第二连接板的一面固定连接,所述第二限位杆体的杆体滑动贯穿于所述第二限位插槽的槽壁,所述第二限位杆体的另一端滑动插接于所述第二固定板的内部,所述第二限位杆体与所述第二固定板相抵紧。
13.在一种具体的实施方案中,所述第二限位杆体设置有若干根,若干根所述第二限位杆体的一端均与所述第二连接板的一面固定,若干根所述第二限位杆体均匀的呈圆周分布,若干根所述第二限位杆体的另一端均滑动插接于所述第二固定板的内部,若干根所述第二限位杆体均与所述第二固定板相抵紧。
14.在一种具体的实施方案中,所述第一连接板远离所述第一弹性件的一面设置有第一手持部,所述第二连接板远离所述第二弹性件的一端设置有第二手持部,所述第一手持部和所述第二手持部均为把手。
15.在一种具体的实施方案中,所述第一夹板的一面设置有第一滑杆,所述第一滑杆滑动贯穿于所述第一固定板的板体。
16.在一种具体的实施方案中,所述第二夹板的一面设置有第二滑杆,所述第二滑杆滑动贯穿于所述第二固定板的板体。
附图说明
17.为了更清楚地说明本技术实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
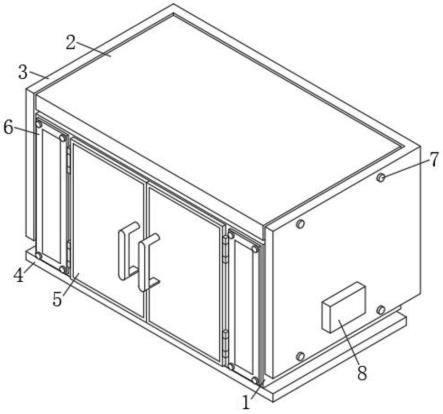
18.图1是本技术实施方式提供的波导定位用六轴电动位移台主视结构示意图;
19.图2为本技术实施方式提供的滑动台和夹持组件部分左视剖面结构示意图;
20.图3为本技术实施方式提供的滑动台、第一限位件和第二限位件部分左视剖面结构示意图;
21.图4为本技术实施方式提供的第二限位件和第二固定板部分结构示意图;
22.图5为本技术实施方式提供的第一限位件和第一固定板部分结构示意图。
23.图中:100-电动位移台本体;110-滑动台;111-第一限位插槽;112-第二限位插槽;
120-第一限位件;121-第一连接板;1211-第一手持部;122-第一弹性件;123-第一限位杆;130-第二限位件;131-第二连接板;1311-第二手持部;132-第二弹性件;133-第二限位杆体;200-夹持组件;210-第一固定板;220-第一螺纹杆;221-第一手轮;230-第一夹板;231-第一滑杆;240-第二固定板;250-第二螺纹杆;251-第二手轮;260-第二夹板;261-第二滑杆。
具体实施方式
24.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述。
25.为使本技术实施方式的目的、技术方案和优点更加清楚,下面将结合本技术实施方式中的附图,对本技术实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本技术一部分实施方式,而不是全部的实施方式。基于本技术中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围。
26.请参阅图1,本技术提供一种波导定位用六轴电动位移台,包括电动位移台本体100和夹持组件200。
27.请参阅图1-5,电动位移台本体100的上表面设置有滑动台110,滑动台110的上表面开设有第一限位插槽111,滑动台110的上表面开设有第二限位插槽112,第二限位插槽112与第一限位插槽111对应设置,滑动台110的一侧安装有第一限位件120,第一限位件120包括第一连接板121、第一弹性件122和第一限位杆123,第一弹性件122的一端与滑动台110的一侧固定连接,第一连接板121的一面与第一弹性件122的另一端固定连接,第一限位杆123的一端与第一连接板121的一面固定连接,第一限位杆123的杆体滑动贯穿于第一限位插槽111的槽壁,第一限位杆123设置有若干根,若干根第一限位杆123的一端均与第一连接板121的一面固定连接,若干根第一限位杆123均匀的呈圆周分布,若干根第一限位杆123的杆体均滑动贯穿于第一限位插槽111的槽壁。
28.在本实施例中,滑动台110的另一侧安装有第二限位件130,第二限位件130包括第二连接板131、第二弹性件132和第二限位杆体133,第二弹性件132的一端固定连接于滑动台110远离第一弹性件122的一侧,第二连接板131的一面固定连接于第二弹性件132的另一端,第二限位杆体133的一端与第二连接板131的一面固定连接,第二限位杆体133的杆体滑动贯穿于第二限位插槽112的槽壁,第二限位杆体133设置有若干根,若干根第二限位杆体133的一端均与第二连接板131的一面固定,若干根第二限位杆体133均匀的呈圆周分布。
29.在本技术中,第一连接板121远离第一弹性件122的一面设置有第一手持部1211,第一手持部1211方便工人拉动第一连接板121,第二连接板131远离第二弹性件132的一端设置有第二手持部1311,第二手持部1311方便工人拉动第二连接板131,第一手持部1211和第二手持部1311均为把手。
30.在本技术中,第一弹性件122位于若干根第一限位杆123的中间,第二弹性件132位于若干根第二限位杆体133的中间,第一弹性件122和第二弹性件132均为弹簧。
31.请参阅图1-5,夹持组件200包括第一固定板210、第一螺纹杆220、第一夹板230、第二固定板240、第二螺纹杆250和第二夹板260,第一固定板210的板体滑动插接于滑动台110的内部,第一固定板210的板体滑动插接于第一限位插槽111的内部,第一限位件120的一端
滑动插接于第一固定板210的内部,第一限位件120用于对第一固定板210进行固定限位,第一限位杆123的另一端滑动插接于第一固定板210的内部,第一限位杆123与第一固定板210相抵紧,若干根第一限位杆123的另一端均滑动插接于第一固定板210的内部,若干根第一限位杆123均与第一固定板210相抵紧。
32.在本实施例中,第一螺纹杆220螺纹贯穿于第一固定板210的板体,第一夹板230的一面与第一螺纹杆220的一端转动连接,第一夹板230的一面设置有第一滑杆231,第一滑杆231滑动贯穿于第一固定板210的板体,第一滑杆231用于提高第一夹板230的稳定性。
33.在本技术中,第二固定板240滑动插接于滑动台110的内部,第二固定板240的板体滑动插接于第二限位插槽112的内部,第二限位件130的一端滑动插接于第二固定板240的内部,第二限位件130用于对第二固定板240进行限位固定,第二限位杆体133的另一端滑动插接于第二固定板240的内部,第二限位杆体133与第二固定板240相抵紧,若干根第二限位杆体133的另一端均滑动插接于第二固定板240的内部,若干根第二限位杆体133均与第二固定板240相抵紧。
34.在本技术中,第二螺纹杆250螺纹贯穿于第二固定板240的板体,第二夹板260的一面与第二螺纹杆250的一端转动连接,第二夹板260的一面设置有第二滑杆261,第二滑杆261滑动贯穿于第二固定板240的板体,第二滑杆261用于提高第二夹板260的稳定性,第二夹板260与第一夹板230对应设置,第二夹板260与第一夹板230相互配合对物体进行夹持固定。
35.在本实施例中,第一螺纹杆220远离第一夹板230的一端设置有第一手轮221,第二连接板131方便工人旋转第一螺纹杆220,第二螺纹杆250远离第二夹板260的一端设置有第二手轮251,第二手轮251方便工人旋转第二螺纹杆250。
36.该波导定位用六轴电动位移台的工作原理:使用时,可将需要进行移动的物体放置于滑动台110上,然后便可旋转第一螺纹杆220和第二螺纹杆250,使第一螺纹杆220带动第一夹板230向第二夹板260移动,使第二螺纹杆250带动第二夹板260向第一夹板230移动,进而便可使第二夹板260和第一夹板230对滑动台110上的物体进行夹持固定,不需要使用夹持组件200时,向远离第一固定板210的方向拉动第一连接板121,进而会带动第一限位杆123向远离第一固定板210的方向进行移动,当第一限位杆123脱离第一固定板210内部后,便可将第一固定板210抽出第一限位插槽111的内部,向远离第二固定板240的方向拉动第二连接板131,当第二限位杆体133脱离第二固定板240内部后,便可将第二固定板240抽出第二限位插槽112的内部,可使用第二夹板260和第一夹板230对滑动台110上的物体进行夹持固定,可提高物体的稳定性,当滑动台110移动时物体不易发生晃动,非常有利于使用。
37.以上所述仅为本技术的实施例而已,并不用于限制本技术的保护范围,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
38.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应所述以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。