1.本实用新型涉及包装盒生产线领域,具体是一种全自动外包装定制标识加工系统。
背景技术:
2.在许多产品的生产加工中,都需要在包装盒或者产品表面显眼位置对其进行特定的标识加工,用于突出品牌识别效果。现在这一工序主要通过独立配置的激光镭射打标设备完成,但是其操作加工还更多的依赖于人工配合,例如在各个环节物料传递中,以及工位之间的转移中,都需要人员配合,工人劳动强度大,危险系数高,无法形成连贯的高效的生产,对人工成本居高不下。
技术实现要素:
3.本实用新型的目的在于提供一种全自动外包装定制标识加工系统,它实现自动连贯的上下料、打标、检测、装盖生产,生产高效,降低人工成本。
4.本实用新型为实现上述目的,通过以下技术方案实现:
5.一种全自动外包装定制标识加工系统,包括主体设备,所述主体设备的顶部安装有环形导轨机构,所述环形导轨机构上设有回转的治具板,所述主体设备上环绕环形导轨设有上料工位、下料工位、打码工位、检测工位、装配工位;
6.所述上料工位及下料工位相邻设置且设有第一机械手,所述打码工位设有激光打码机,所述检测工位设有基于视觉识别的检测装置,
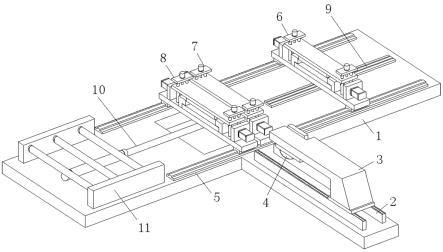
7.所述装配工位上安装有水平延伸的直线导轨,所述直线导轨上直线滑动安装有搭载架,所述搭载架上设有具有升降行程的安装板,所述安装板底部设有负压吸附件,所述直线导轨与环形导轨机构相邻的一端位于环形导轨机构的上方。
8.所述直线导轨的外端设有与其上下对应的提料机构,所述提料机构包括直柱形筒壳,所述筒壳的内部安装有电推杆,所述电推杆的顶端设有与其伸缩配合的升降杆,所述升降杆的顶端固定有若干根用于支撑工件的支撑杆,所述筒壳的顶部设有两两相对的四个限位挡板,所述限位挡板竖直延伸,相对的两个所述限位挡板之间的最小距离与盒盖的宽度相适应。
9.所述搭载架上安装有竖直的第二气缸,所述第二气缸的底端设有与其上下伸缩配合的伸缩杆,所述伸缩杆的底端固定安装板,所述第二气缸的两端设有与搭载架固定安装的滑套,所述滑套内贯穿有光杆导轨,所述光杆导轨的底端与安装板固定连接。
10.所述主体设备的顶部端面安装有工作面,所述工作面下方安装环形导轨机构;所述环形导轨机构包括台板,所述台板固定安装在工作面的下方,所述台板上安装有回型轨道,所述回型轨道上配合有与其滑动连接的多个滑台,所述回型轨道的里侧设有与其等距配合的回型传动皮带,所述回型轨道的两端位置设有带轮,其中一个所述带轮通过电机驱动,所述回型传动皮带缠绕在带轮上,所述回型传动皮带上等距的设有与滑台对应数量的
定位块,所述定位块与滑台一一固定连接,所述治具板固定在滑台上,所述工作面上对应回型轨道设有回型孔,所述治具板贯穿回型孔暴露在工作面上方。
11.还包括移动料架;所述移动料架包括agv导引车,所述agv导引车的顶部搭载安装有托盘,所述托盘上设置与工件相适应的料槽,料槽呈矩阵分布。
12.所述第一机械手包括自下而上依次铰接的底座、第一臂杆、第二臂杆、第三臂杆、第四臂杆、抓手机构,所述抓手机构包括爪身,所述爪身上设有与其伸缩配合的第一伸缩杆和第二伸缩杆,所述第一伸缩杆的外端设有第一爪头,所述第二伸缩杆的外端设有第二爪头,所述第一爪头和第二爪头的末端设有互相对称的限位块,所述限位块相向延伸凸起,所述限位块相对的里侧侧边上设有直角卡槽。
13.所述抓手机构上配套安装有用于实现手眼标定工业摄像机。
14.对比现有技术,本实用新型的有益效果在于:
15.本系统是一套自动化蓝牙耳机打标生产线,具有自动化程度高,打标检测筛选一体化的优点。对包装盒进行镭射激光打标及装盖的全过程无人自动化运转,多个工序技术可连贯性进行,电控上下料、传送、打码、检测和物料吸盘顶盖装配对待打码的产品实现全定制化、自动化的打码和验视操作。避免人工浪费、提高生产效率的同时还提高了打码检测的准确率。
附图说明
16.附图1是本实用新型的俯视图。
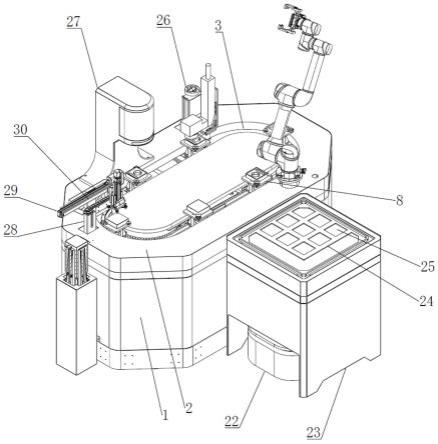
17.附图2是本实用新型的示意图。
18.附图3是本实用新型的装配工位组件的结构示意图。
19.附图4是本实用新型提料机构的内部结构示意图。
20.附图5是本实用新型装配工位的装配组件示意图。
21.附图6是本实用新型第一机械手的示意图。
22.附图7是本实用新型抓手机构示意图。
23.附图8是本实用新型环形导轨机构示意图。
24.附图中所示标号:
25.1、主体设备;2、工作面;3、环形导轨机构;4、回型轨道;5、回型传动皮带;6、滑台;7、定位块;8、治具板;9、台板;10、底座;11、第一臂杆;12、第二臂杆;13、第三臂杆;14、第四臂杆;15、抓手机构;16、爪身;17、第一爪头;18、第二爪头;19、限位块;20、直角卡槽;21、工业摄像机;22、agv导引车;23、移动料架;24、托盘;25、料槽;26、打码机;27、检测装置;28、支撑架;29、轨道架;30、直线导轨;31、搭载架;32、第二气缸;33、安装板;34、负压吸附件;35、滑套;36、光杆导轨;37、筒壳;38、电推杆;39、支撑杆;40、限位挡板;41、盒盖。
具体实施方式
26.下面结合具体实施例,进一步阐述本实用新型。应理解,这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围。此外应理解,在阅读了本实用新型讲授的内容之后,本领域技术人员可以对本实用新型作各种改动或修改,这些等价形式同样落于本技术所限定的范围。
27.下述实施例中所涉及的仪器、试剂、材料等,若无特别说明,均为现有技术中已有的常规仪器、试剂、材料等,可通过正规商业途径获得。下述实施例中所涉及的实验方法,检测方法等,若无特别说明,均为现有技术中已有的常规实验方法,检测方法等。
28.实施例:一种全自动外包装定制标识加工系统
29.主体包括主体设备1以及与其配合上料的移动料架23;
30.所述主体设备1的顶部端面安装有工作面2,所述工作面2下方安装有环形导轨机构3;
31.所述环形导轨机构3包括台板9,所述台板9固定安装在工作面2的下方,所述台板9上安装有回型轨道4,所述回型轨道4上配合有与其滑动连接的6个滑台6,所述回型轨道4的里侧设有与其等距配合的回型传动皮带5,所述回型轨道4的两端位置设有带轮,其中一个所述带轮通过电机驱动,所述回型传动皮带5缠绕在带轮上,所述回型传动皮带上等距的设有与滑台6对应数量的定位块7,所述定位块7与滑台6一一固定连接,实现对滑台6的驱动和限位,使滑台6在回型传动皮带5的带动下等距的围绕回型轨道4回转输送。
32.所述滑台6上安装固定有治具板8,所述工作面2上对应回型轨道4设有回型孔,所述回型孔用于方便治具板8的底部支架贯穿,从而让位治具板8的回转行程,使得治具板8的顶部端面能够暴露在工作面2上方,对工件进行搭载并在各个工位之间进行传送。
33.所述工作面2上围绕环形导轨机构3分别设有上料工位、下料工位、打码工位、检测工位、装配工位;
34.所述上料工位及下料工位相邻设置且设有第一机械手,所述第一机械手采用带视觉导视的多轴机械臂结构。
35.通过机械手对上料工位和下料工位上的包装盒进行转移。在回型轨道4上对应上料工位和下料工位分别设有探头,用以识别滑台6是否位于该位点上。当滑台6移动到上料工位位点或下料工位位点的时候后,探头识别后反馈控制第一机械手执行对应的动作。在上料工位上为自台板9上抓取包装盒到移动料架23上,在下料工位上为自移动料架23抓取包装盒到台板9上。其中上料工位作为一个工作循环的起始端,工件到达上料工位后,围绕回型轨道4回转一圈后到达下料工位,完成一轮加工,并在下料工位下料后前移少许回到上料工位,准备新一轮的循环。
36.所述第一机械手包括自下而上依次铰接的底座10、第一臂杆11、第二臂杆12、第三臂杆13、第四臂杆14、抓手机构15。所述底座10竖直设置且与固定料架基于转动轴为竖直的转动安装,所述第一臂杆11的底端与底座10的顶部转动连接,所述第二臂杆12的底端与第一臂杆11的顶端转动连接,所述第二臂杆12的顶端与第三臂杆13的中部转动连接,所述第三臂杆13的顶端与第四臂杆14的中部转动连接,所述抓手机构15安装在第四臂杆14的一端。
37.所述抓手机构15为基于第一气缸驱动的气缸夹爪结构,具体包括爪身16,所述爪身16上设有与其伸缩配合的第一伸缩杆和第二伸缩杆,所述第一伸缩杆的外端设有第一爪头17,所述第二伸缩杆的外端设有第二爪头18,所述第一爪头17和第二爪头18并列设置,且基于伸缩杆的伸缩而相互靠拢或分离,所述第一伸缩杆和第二伸缩杆的伸缩基于第一气缸控制。
38.所述第一爪头17和第二爪头18的末端设有互相对称的限位块19,所述限位块19相
向延伸凸起,所述限位块19相对的里侧侧边上设有直角卡槽20,所述直角卡槽20用于与正方形包装盒的对角位置相配合,对包装盒进行抓取。
39.所述抓手机构15上配套安装有工业摄像机21,所述工业摄像机21采集图像,用于反馈机械手的空间位置,实现手眼标定,让机械手能精确抓取到摄像机定位的目标。
40.上料工位和下料工位位于回型轨道4一侧,覆盖两个滑台6的位置,通过第一机械臂抓取包装盒放在治具板8上,或者抓取治具板8上的包装盒将其从回型生产线上取下下料。
41.本加工系统 进一步的还可以设置自动转运的移动料架23,包括agv导引车22,所述agv导引车22能够精确的进行行程控制,能够沿规定的电磁轨道所带来的路径讯息进行移动行驶与动作,提供安全保护并且节约人力成本。所述agv导引车22的顶部搭载安装有托盘24,所述托盘24上设置与包装盒(方形包装盒)相适应的料槽25,料槽25呈矩阵分布,方便快速识别抓取。加入agv置物架,能够沿规定的电磁轨道所带来的路径讯息进行移动行驶与动作,提供安全保护并且节约人力成本。
42.通过移动料架23,配合第一机械手,实现自托盘24上自动往生产线上料,以及自生产线上往托盘24上下料,脱离人工操作。
43.所述打码工位上安装有打码机26,所述打码机26为采用激光镭射打码设备,可以输入手写文字或图案,将设置内容镭射到工件(包装盒)表面。
44.所述检测工位上安装有基于视觉识别的检测装置27,采用工业相机拍摄成像,记录和对比打标图案。
45.所述装配工位上安装有支撑架28,所述支撑架28的顶端固定有水平延伸的轨道架29,所述轨道架29上设有直线导轨30,所述直线导轨30上滑动连接有直线行程滑动的搭载架31,所述搭载架31上安装有竖直的第二气缸32,所述第二气缸32的底端设有与其上下伸缩配合的伸缩杆,所述伸缩杆的底端固定有安装板33,所述安装板33的底端安装有负压吸附件34,具体采用负压气源的吸盘,实现对盒盖41的抓取。
46.所述第二气缸32的两端设有与搭载架31固定安装的滑套35,所述滑套35内贯穿有光杆导轨36,所述光杆导轨36的底端与安装板33固定连接,实现对安装板33升降行程的辅助限位。当搭载架31滑动到直线导轨30内端的时候,能够与位于该位置回型轨道4上的支具板上下冲齐,实现将盒盖41盖在支具板上的包装盒上。
47.对于包装盒盒盖41的上料,同样采用自动化的控制,在主体设备1的一侧固定有供应盒盖41的提料机构,所述提料机构位于直线导轨30行程的外端,所述搭载架31位于外端的时候,所述负压吸附件34与位于支撑杆39上的盒盖41上下冲齐。
48.所述盒盖41提料机构包括矩形截面的直柱形筒壳37,所述筒壳37的内部安装有电推杆38,所述电推杆38的顶端设有与其伸缩配合的升降杆,所述升降杆的顶端固定有四根支撑杆39,四根所述支撑杆39分别用于支撑在盒盖41(盒口在下)的四角位置,实现对方形盒盖41的支撑。
49.所述筒壳37的顶部设有两两相对的四个限位挡板40,所述限位挡板40竖直延伸,所述限位挡板40设置在筒壳37侧壁的顶侧,相对的两个所述限位挡板40之间的最小距离与盒盖41的宽度相适应,从而对一摞盒盖41实现限位约束。在具体运行的时候,在其中一个限位挡板40顶部安装传感器,检测到顶层盒盖41被抓取后,下方电推杆38升起至下一个盒盖
41的上部暴露在限位挡板40顶侧的上方,便于再次实现负压吸附抓取。
50.通过本机构,能够自动的对传送到本工位上的,完成激光打标及检测的包装盒扣盖,其过程包括,通过升降杆升降实现下一个盒盖41的逐步逐个上升,通过位于搭载架31上的负压吸附件34对盒盖41实现吸附抓取,通过搭载架31的左右移动实现将盒盖41移动到靠近回型轨道4的一端后,通过伸缩杆放下盒盖41,松开吸附实现盒盖41的装配。
51.综上,通过整条全自动化的上料、打标、检测、盖盖、下料,实现对人工的全流程代替。其动作流程包括:通过agv将托盘24上的包装盒移动到主体设备1一侧,靠近上料工位和下料工位,通过第一机械手将工件抓取到一个治具板8上,通过环形导轨机构3带动工件转动,依次实现达标、视觉检测、装盖后回到原位,通过第一机械手将完成的工件抓取到托盘24上。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。