1.本实用新型涉及卷烟辅料拣选配盘技术领域,具体为一种卷烟辅料拣选配盘系统。
背景技术:
2.目前卷烟厂卷烟辅料搭配一般采用人工辅料配盘模式或半自动辅料配盘模式。在人工辅料配盘模式中,先由人工将卷烟辅料原托盘按照配盘要求搬运至配盘区,然后人工将单个空托盘沿卷烟原辅料托盘进行移动搬运,并逐个从原辅料托盘上将所需配盘的卷烟原辅料拣选搬运至搭配托盘上,经过卷烟原辅料的若干次人工拣选搬运,完成一个辅料配盘的拣选和搭配。
3.其中,人工辅料配盘模式需要大量人工进行作业,劳动强度大,作业效率低,由于劳工作业存在不可控因素,造成卷烟辅料及托盘的损耗较大;同时卷烟厂辅料品规数量都比较多,少则上百种,多则几百种,人工配盘模式很容易导致差错和混乱;另外人工密集作业区伴随着人工叉车作业,极易发生安全事故。
4.而半自动辅料配盘模式,是通过自动输送系统将原辅料托盘和辅料搭配所需托盘根据配盘要求输送到相应的辅料搭配工位,由人工根据配盘要求将原辅料托盘上的辅料分拣搬运至辅料搭配托盘上,根据卷烟厂车间布局和卷辅料搭配工艺要求的不同,半自动辅料配盘模式衍生出多种布局模式。相对于人工配盘模式,半自动辅料配盘模式中减少了托盘的人工搬运,采用了货到人前的拣选方式,但由于原辅料托盘、辅料配盘以及空托盘供给和剩余托盘处理的工艺路线非常复杂,造成设备工艺布局庞大且复杂,辅料配盘效率十分低下,基本不能满足卷烟厂正常工作需要;同时配盘工位被各种输送设备环绕,给人员进出造成很大不便,并存在一定的安全隐患。
5.因此,我们提出一种卷烟辅料拣选配盘系统来解决上述的问题。
技术实现要素:
6.本实用新型的目的在于提供一种卷烟辅料拣选配盘系统,以解决上述背景技术中提出的现有的辅助配盘效率低,不能满足卷烟厂正常工作需要,同时配盘工位被输送设备环绕,人员进出不便,存在安全隐患的问题。
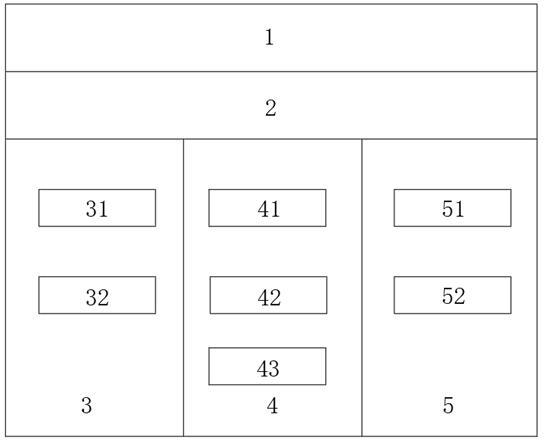
7.为实现以上目的,本实用新型通过以下技术方案予以实现:一种卷烟辅料拣选配盘系统,包括卷烟辅料拣选配盘管理及调度控制系统、地面托盘自动搬运机器人系统、原辅料托盘存储系统、通用型辅料拣选配盘机器人工作站和辅料搭配托盘存储系统;
8.所述原辅料托盘存储系统包括原辅料托盘和原辅料托盘剩余托盘;
9.所述通用型辅料拣选配盘机器人工作站包括托盘地面移载装置、辅料拣选配盘机器人和配盘用空托盘;
10.所述辅料拣选配盘机器人包括机器人本体、机器人控制系统、夹具、夹具快换装置和视觉识别定位装置;
11.所述辅料搭配托盘存储系统包括配盘用空托盘组、辅料搭配托盘。
12.可选的,所述夹具包括内胀式夹具、吸盘式夹具、机械夹取式夹具或复合夹具。
13.可选的,所述内胀式夹具、吸盘式夹具、机械夹取式夹具或复合夹具均能通过夹具快换装置进行更换。
14.可选的,所述地面托盘自动搬运机器人系统的货物承载形式为背叉式、潜入式或背负式。
15.与现有技术相比,本实用新型提供了一种卷烟辅料拣选配盘系统,具备以下有益效果:
16.1、该卷烟辅料拣选配盘系统,能实现卷烟辅料的自动配盘,通过地面托盘搬运机器人完成原辅料托盘、辅料搭配托盘以及空托盘组等托盘物料的搬运,通过拣选配盘机器人实现辅料从原辅料托盘进行拣选,然后根据配盘要求搭配到辅料搭配托盘上,同时利用复合夹具,拣选配盘机器人还可以根据系统调度,实现空托盘的拆分,并由机器人放置到辅料配盘工位;结合托盘移载装置的适用,实现在机器人配盘过程中原辅料托盘相应辅助包装材料的人工解除。为基于通用化、柔性化、模块化、智能化的卷烟辅料托盘搭配模式提供全新的解决方案。
附图说明
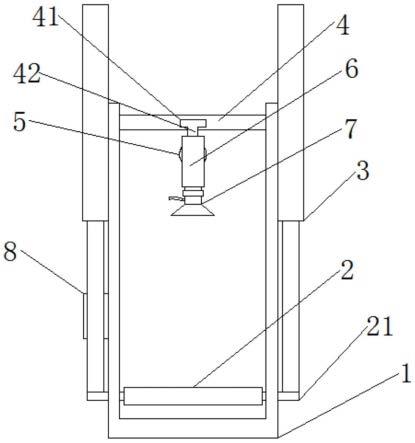
17.图1为本实用新型卷烟辅料拣选配盘系统结构的示意图。
18.图中:1、卷烟辅料拣选配盘管理及调度控制系统;2、地面托盘自动搬运机器人系统;3、原辅料托盘存储系统;31、原辅料托盘;32、原辅料托盘剩余托盘;4、通用型辅料拣选配盘机器人工作站;41、托盘地面移载装置;42、辅料拣选配盘机器人;43、配盘用空托盘;5、辅料搭配托盘存储系统;51、配盘用空托盘组;52、辅料搭配托盘。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
21.下面所描述的本实用新型不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
22.请参阅图1所示,本技术的一个实施例中提供了一种卷烟辅料拣选配盘系统,包括卷烟辅料拣选配盘管理及调度控制系统1、地面托盘自动搬运机器人系统2、原辅料托盘存储系统3、通用型辅料拣选配盘机器人工作站4和辅料搭配托盘存储系统5。
23.本实施例中,地面托盘自动搬运机器人系统2可以在不需要其它辅助设施(如料架
等)的情况下,实现托盘在地面的取、放货作业,其货物承载形式包含且不仅限于背叉式、潜入式、背负式等,其导航方式包含并不仅限于激光导航、二维码导航、(电)磁导航、陀螺仪导航、自然导航、混合导航等。
24.进一步地,原辅料托盘存储系统3包括原辅料托盘31和原辅料托盘剩余托盘32。
25.其中,原辅料托盘31为装载供拣选配盘用的原辅料实托盘,一般由辅料提供商以整托盘包装形式提供,少量由辅料供应商以散件形式提供再码垛到托盘上,作为原辅料托盘31;原辅料托盘剩余托盘32为完成辅料的拣选配盘后形成的空托盘或仍承载有剩余原辅料的托盘。
26.进一步地,通用型辅料拣选配盘机器人工作站4包括托盘地面移载装置41、辅料拣选配盘机器人42和配盘用空托盘43。辅料搭配托盘存储系统5包括配盘用空托盘组51、辅料搭配托盘52。
27.其中,托盘地面移载装置41实现辅料搭配托盘52在配盘工位和接驳工位之间的转移或更换,以实现辅料拣选配盘机器人42拣选配盘作业、地面托盘自动搬运机器人系统2取放货作业以及人工去除原辅料辅助包装材料作业在物理空间上不产生交叉,从而确保设备运行及人工作业的安全性;另外,在一个原辅料托盘31或辅料配盘完成拣选搭配后,由托盘地面移载装置41移出机器人作业区,然后将下一个原辅料托盘31或空托盘组移入机器人作业区;托盘地面移载装置41围绕在辅料拣选配盘机器人42周围布置,其数量根据辅料搭配需求和功能设定,可以是一个,也可以是多个;其移载结构包含但不仅限于滑轨式、货叉式、输送式等,其驱动形式包含但不仅限于电动、气动、液压驱动等。
28.进一步地,辅料拣选配盘机器人42包括机器人本体、机器人控制系统、夹具、夹具快换装置和视觉识别定位装置。
29.其中,夹具包含但不仅限于内胀式夹具、吸盘式夹具、机械夹取式夹具、复合夹具等,夹具可以通过夹具快换装置进行夹具更换;通过不同夹具的使用,使辅料拣选配盘机器人42可满足多种物料形态的拣选和配盘;多种物料形态包括且不仅限于圆盘式物料、箱式包装物料以及空托盘等;视觉识别定位装置通过视觉识别算法,对物料形态及位置进行数据提取和分析,从而为机器人拣选和搭配提供精确物料形态和定位数据。
30.配盘用空托盘43由辅料拣选配盘机器人42根据配盘要求从配盘用空托盘组51暂存工位拣取单个空托盘并放置到对应的托盘地面移载装置41上。
31.卷烟辅料拣选配盘管理及调度控制系统1供应商为上海坤大信息技术有限公司、南京音飞储存设备(集团)股份有限公司、深圳市今天国际物流技术股份有限公司或合肥井松智能科技股份有限公司。
32.地面托盘自动搬运机器人系统2供应商为上海坤大信息技术有限公司、机科发展科技股份有限公司、广东嘉腾机器人自动化有限公司或广州市远能物流自动化设备科技有限公司;
33.原辅料托盘存储系统3的供应商有上海坤大信息技术有限公司、南京音飞储存设备(集团)股份有限公司、深圳市今天国际物流技术股份有限公司或合肥井松智能科技股份有限公司。
34.通用型辅料拣选配盘机器人工作站4的供应商有上海坤大信息技术有限公司、沈阳新松机器人自动化股份有限公司、江苏沃达机器人科技有限公司、上海发那科机器人有
限公司或库卡机器人制造(上海)有限公司。
35.辅料搭配托盘存储系统5的供应商有上海坤大信息技术有限公司、南京音飞储存设备(集团)股份有限公司、深圳市今天国际物流技术股份有限公司或合肥井松智能科技股份有限公司。
36.本实用新型在使用时:
37.首先,根据卷烟辅料配盘计划及辅料搭配要求,卷烟辅料拣选配盘管理及调度控制系统1发出调度指令,地面托盘自动搬运机器人系统2通过自动搬运将原辅料托盘31从原辅料托盘存储系统3的相应存储位取出,搬运至通用型辅料拣选配盘机器人工作站4对应的接驳工位,由托盘地面移载装置41将原辅料托盘31从接驳工位移载到配盘工位。
38.接着地面托盘自动搬运机器人系统2通过自动搬运将配盘用空托盘组51从辅料搭配托盘存储系统5相应站台取走,搬运至通用型辅料拣选配盘机器人工作站4对应的接驳工位,由托盘地面移载装置41将配盘用空托盘组51从接驳工位移载到空托盘组暂存工位。
39.当辅料拣选搭配所需的原辅料托盘31和配盘用空托盘组51都到达配盘工位后,辅料拣选配盘机器人42开始辅料的拣选搭配作业。
40.首先拣选配盘机器人42采用对应夹具将位于空托盘组暂存工位上的配盘用空托盘组51分解成单个配盘用空托盘43,放置到对应的配盘工位上,然后拣选配盘机器人42采用视觉识别定位装置对原辅料托盘31进行规格、类型及位置的检测识别,根据分析结果,拣选配盘机器人42采用对应的夹具将原辅料从原辅料托盘31拣选搭配至配盘用空托盘43上,形成辅料搭配托盘52。
41.拣选搭配过程中如果原辅料托盘31上存在一些辅助包装材料需要去除,则由托盘地面移载装置41将原辅料托盘31从配盘工位移载至接驳工位,由人工将原辅料托盘31上的辅助包装材料收集去除后,再由托盘地面移载装置41将原辅料托盘31从接驳工位移载至配盘工位,继续为辅料拣选搭配提供原辅料。
42.当原辅料托盘31上的原辅料拣选搭配完成后形成了原辅料托盘剩余托盘32,由托盘地面移载装置41将原辅料托盘剩余托盘32从配盘工位移载至接驳工位,经地面托盘自动搬运机器人系统2自动搬运至原辅料托盘存储系统3相应工位进行回收。
43.当拣选配盘机器人42将原辅料根据辅料配盘要求拣选搭配到配盘用空托盘43上形成了辅料搭配托盘52。
44.完成搭配后,辅料搭配托盘52由托盘地面移载装置41移载到接驳工位,经地面托盘自动搬运机器人系统2自动搬运至辅料搭配托盘存储系统5相应入库工位进行入库。
45.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
46.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换
和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。