用于可植入医疗设备的递送装置
1.相关申请的交叉引用
2.本技术要求2020年3月26日提交的美国临时申请第63/000,225号的权益,该申请的全部内容并入本文。
技术领域
3.本公开涉及用于可植入医疗设备(例如假体瓣膜)的递送装置的实施例。
背景技术:
4.递送设备(例如血管内递送设备)在各种手术程序中用于将假体医疗设备递送到身体内部不易通过外科手术接近的方位或期望无需外科手术即可接近的方位。接近身体内部的目标方位是通过医疗专家插入并引导递送设备穿过身体中的通路或管腔(包括但不限于血管、食道、气管、胃肠道的任何部分,淋巴管,仅举几例)来实现的。假体医疗设备可以包括可扩张瓣膜或器械(例如,支架)。在一个具体示例中,可扩张假体心脏瓣膜可以以卷曲状态安装在递送设备的远端上,然后在植入部位处从递送设备的囊(capsule)展开,使得假体瓣膜能够自扩张到其功能尺寸。
5.在一些实施例中,为了便于使用,递送设备能够经由在设备的手柄部分中包括马达而被机动化。在假体瓣膜的递送期间,医疗专家操作马达以缩回囊并展开瓣膜。虽然很少见,但电子部件可能会发生故障。如果马达在瓣膜展开期间无法操作,则瓣膜递送手术程序可能会受到影响。
技术实现要素:
6.本文公开了用于可植入医疗设备(例如,假体心脏瓣膜)的改进的递送装置的实施例,以及使用这种装置将可植入医疗设备植入受试者体内的相关方法。递送装置经由马达操作并且包括手动展开工具,手动展开工具能够在马达发生故障时用作备用或“应急”解决方案。
7.在一个代表性实施例中,递送装置可以包括由医疗专家用来操作该装置的手柄部分。递送装置可以具有:从手柄部分延伸的轴;递送囊,其被配置为容纳处于径向压缩状态以递送到受试者体内的医疗设备;以及可旋转部件,其设置在手柄部分中并且可操作地耦接到递送囊,以在可旋转部件旋转时产生递送囊相对于轴的轴向移动。递送装置可以具有设置在手柄部分中并且可操作地耦接到可旋转部件以产生可旋转部件的旋转和递送囊的相应轴向移动的马达。
8.递送装置可以进一步包括手动展开工具,例如拉绳,拉绳被配置为当手动拉力被施加到拉绳以相对于可旋转部件拉动拉绳时产生可旋转部件的旋转和递送囊的相应轴向移动。
9.例如,在瓣膜展开手术程序期间马达功能故障时,用户可以操作手动展开工具以手动完成展开手术程序。
10.在另一个代表性实施例中,用于递送可扩张、可植入医疗设备的递送装置包括:手柄部分;从手柄部分延伸的轴;递送囊,其被配置为容纳处于径向压缩状态以递送到受试者体内的医疗设备;可旋转部件,其设置在手柄部分中并且可操作地耦接到递送囊,以在可旋转部件旋转时产生递送囊相对于轴的轴向移动,其中可旋转部件包括多个周向排列的齿轮齿;马达,其设置在手柄部分中并且可操作地耦接到可旋转部件,以产生可旋转部件的旋转和递送囊的相应轴向移动;以及包括多个驱动齿的手动展开工具,所述多个驱动齿被配置为啮合可旋转部件的齿轮齿,其中展开工具可沿着延伸穿过手柄部分的轴线手动移动,以产生可旋转部件的旋转和递送囊的相应轴向移动。
11.在另一个代表性实施例中,将医疗设备植入受试者体内的方法包括用递送装置将医疗设备插入受试者的脉管系统(或其等效物),其中医疗设备以径向压缩状态保持在递送装置的递送囊内。递送装置包括手柄部分和容纳在手柄部分中的可旋转部件。该方法还包括将拉绳拉过手柄部分,以产生可旋转部件的旋转,这继而产生递送囊相对于医疗设备的轴向移动,以从递送囊展开医疗设备并允许医疗设备从径向压缩状态径向扩张到径向扩张状态。
12.在另一个代表性实施例中,将医疗设备植入受试者体内的方法包括用递送装置将医疗设备插入受试者的脉管系统(或其等效物),其中医疗设备以径向压缩状态保持在递送装置的递送囊内,其中递送装置包括手柄部分和容纳在手柄部分中的可旋转部件。该方法还包括操作电子开关以致动可操作地耦接到可旋转部件的马达。如果马达不能产生递送囊的移动,则拉绳被拉过手柄部分以产生可旋转部件的旋转,这继而产生递送囊在第一方向上相对于医疗设备的轴向移动,以从递送囊展开医疗设备并允许医疗设备从径向压缩状态径向扩张到径向扩张状态。替代地,如果马达在医疗设备从递送囊部分地展开时发生故障,则绳被拉过手柄部分以产生可旋转部件的旋转,这继而产生递送囊在第二方向上相对于医疗设备的轴向移动,以重新捕获部分地展开的医疗设备。
13.在另一个代表性实施例中,用于可扩张、可植入医疗设备的递送装置包括:手柄部分;递送囊,其被配置为容纳处于径向压缩状态以递送到受试者体内的医疗设备;可旋转部件,其设置在手柄部分中并且可操作地耦接到递送囊以在可旋转部件旋转时产生递送囊相对于手柄部分的轴向移动,以及拉绳,其被配置为在手动拉力被施加到拉绳以相对于可旋转部件拉动拉绳时产生可旋转部件的旋转和递送囊的相应轴向移动。
14.在另一个代表性实施例中,用于插入受试者体内的医疗装置包括:手柄部分;被配置为插入受试者体内的可移动部件;可旋转部件,其设置在手柄部分中并且可操作地耦接到可移动部件,以在可旋转部件旋转时产生可移动部件相对于手柄部分的轴向移动;以及拉绳,其被配置为当手动拉力被施加到拉绳以相对于可旋转部件拉动拉绳时产生可旋转部件的旋转和可移动部件的相应轴向移动。
15.在另一个代表性实施例中,一种使用医疗装置的方法包括:将医疗装置的可移动部件插入受试者体内,其中医疗装置包括手柄部分和在手柄部分中的可旋转部件;以及将拉绳拉过手柄部分以产生可旋转部件的旋转和可移动部件的相应轴向移动。
16.所公开技术的前述内容和其他目的、特征和优点从以下参照附图进行的详细描述中将变得更加明显。
附图说明
17.图1是可以使用本文公开的任何递送装置植入的可植入假体心脏瓣膜的示例性实施例的侧视图。
18.图2是用于递送图1的假体心脏瓣膜的递送装置的示例性实施例的侧视图。
19.图3是图2的递送装置的远端部分的侧剖视图,示出了以压缩状态容纳在递送囊内的假体瓣膜。
20.图4是图2的递送装置的远端部分的侧视图,示出了递送装置的囊在假体心脏瓣膜框架的一部分之上推进。
21.图5是图2的递送装置的手柄部分的侧视图,示出了用于接收用于手动操作递送装置的手动展开工具的开口。
22.图6是图5的手柄部分的侧视图,示出了手柄部分的外壳的横截面。
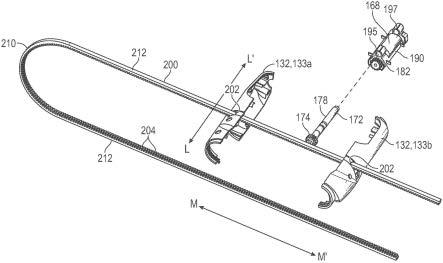
23.图7是图2的递送装置的手柄部分和手动展开工具的实施例的顶部透视分解图,该手动展开工具被配置为能够从递送装置手动展开或重新捕获假体瓣膜。
24.图8是图2的递送装置的手柄部分的侧剖视图。
25.图9a-图9b是图2的递送装置的手柄部分的剖视图,示出了被配置为拉绳的手动展开工具与手柄部分的驱动齿轮的啮合。
26.图10是根据另一个实施例的递送装置的侧视图。
27.图11是手动展开工具的另一个实施例的侧视图,该手动展开工具被配置为与递送装置的手柄部分的可旋转部件相接,并且能够从递送装置手动展开或重新捕获假体瓣膜,手动展开工具具有直配置。
28.图12是手动展开工具的另一个实施例的侧视图,该手动展开工具被配置为与递送装置的手柄部分的可旋转部件相接,并且能够从递送装置手动展开或重新捕获假体瓣膜,手动展开工具具有盘绕配置。
具体实施方式
29.一般注意事项
30.出于本描述的目的,本文描述了本公开的实施例的某些方面、优点和新颖特征。所描述的方法、系统和装置不应被解释为以任何方式进行限制。相反,本公开针对各种公开的实施例的所有新颖的和非显而易见的特征和方面,单独地以及以彼此的各种组合和子组合。所公开的方法、系统和装置不限于任何特定方面、特征或其组合,所公开的方法、系统和装置也不要求存在任何一个或多个特定优点或解决任何一个或多个特定问题。
31.结合本公开的特定方面、实施例或示例描述的特征、整数、特性、化合物、化学部分或群组应理解为适用于本文所述的任何其他方面、实施例或示例,除非与之不相容。本说明书(包括任何所附权利要求、摘要和附图)中公开的所有特征,和/或如此公开的任何方法或过程的所有步骤,可以以任何组合进行组合,除了其中至少一些这样的特征和/或步骤是相互排斥的组合。本公开不限于任何前述实施例的细节。本公开延伸至本说明书(包括任何所附权利要求、摘要和附图)中公开的特征的任何新颖的一个特征或任何新颖的组合,或延伸至如此公开的任何方法或过程的步骤的任何新颖的一个特征或任何新颖的组合。
32.尽管为了方便呈现以特定的、按顺序的次序描述了一些公开的方法的操作,但是
应当理解,这种描述方式涵盖重新排列,除非下面阐述的特定语言需要特定的顺序。例如,按顺序描述的操作在某些情况下可以重新排列或同时执行。此外,为了简单起见,所附附图可能未示出所公开的方法、系统和装置可以与其他系统、方法和装置结合使用的各种方式。
33.如本文所用,术语“一个(a)”、“一个(an)”和“至少一个”涵盖指定元素中的一个或多个。也就是说,如果存在两个特定元素,则这些元素中的一个也存在,因此存在“一个”元素。术语“多个”和“多种”是指指定元素中的两个或多个。
34.如本文所用,在元素列表的最后两个之间使用的术语“和/或”是指列出的元素中的任何一个或多个。例如,短语“a、b和/或c”是指“a”、“b”、“c”、“a和b”、“a和c”、“b和c”或“a、b、c。”35.如本文所用,术语“耦接”通常是指物理耦接或链接,并且在没有特定的相反语言的情况下不排除在耦接的项目之间存在中间元素。
36.方向和其他相关参考(例如,内、外、上、下等)可用于便于对本文的附图和原理的讨论,但不旨在进行限制。例如,可以使用某些术语,例如“内部(inside)”、“外部(outside)”、“顶部”、“向下”、“内部(interior)”、“外部(exterior)”等。在适用的情况下,这些术语用于在处理相对关系时提供某种清晰的描述,特别是关于所示实施例。然而,这些术语并非旨在暗示绝对关系、位置和/或取向。例如,对于一个物体,只要将物体翻转过来,“上”部分就可以变成“下”部分。尽管如此,它仍然是相同的部分,并且物体仍然是相同的。如本文所用,“和/或”是指“和”或“或”以及“和”和“或”。
37.在本技术的上下文中,术语“下”和“上”分别与术语“流入”和“流出”互换使用。因此,例如,瓣膜的下端是它的流入端,并且瓣膜的上端是它的流出端。
38.如本文所用,关于假体心脏瓣膜和递送装置,“近侧”是指更靠近用户和/或更靠近在受试者之外的递送装置的手柄的部件的位置、方向或部分,而“远侧”是指更远离用户和/或递送装置的手柄并且更靠近植入部位的部件的位置、方向或部分。除非另有明确限定,否则术语“纵向”和“轴向”是指在近侧方向和远侧方向上延伸的轴线。此外,术语“径向”是指垂直于轴线布置并沿着来自物体的中心(其中轴线定位在中心,例如假体瓣膜的纵向轴线)的半径指向的方向。
39.所公开技术的示例
40.本文描述了机动化递送装置的示例,该机动化递送装置可用于递送可植入、可扩张医疗设备,例如假体心脏瓣膜。所公开的递送装置包括手动展开工具,该手动展开工具可用于在马达发生故障时操作该装置,从而提高医师在手术程序期间完成医疗设备展开和植入的能力。在一些代表性实施例中,手动展开工具被配置为拉绳,该拉绳被拉过递送装置的手柄部分中的开口以手动操作该装置。
41.在一些实施例中,递送装置被配置为在受试者体内的选定植入部位(例如,在天然主动脉瓣、二尖瓣、三尖瓣或肺动脉瓣内)处递送和植入假体心脏瓣膜(例如图1的示例假体心脏瓣膜)。除了假体心脏瓣膜之外,所公开的递送装置可以适于:递送和植入其他类型的假体瓣膜(例如,静脉瓣膜)和各种其他类型的假体设备,例如支架、移植物、用于假体心脏瓣膜的对接设备、心脏瓣膜修复设备(例如小叶夹)、栓塞线圈等;定位成像设备和/或其部件,包括超声换能器;以及定位能量源,例如用于执行碎石术的设备、rf源、超声发射器、电磁源、激光源、热源等。
42.在本文描述的各种实施例中,递送装置和方法可以在受试者体内展开或执行。受试者包括(但不限于)医疗患者、兽医患者、动物模型、尸体以及心脏和脉管系统的模拟器(例如,拟人化幻体模型(phantom)和外植体组织)。因此,各种实施例涉及用于医疗手术程序、医疗手术程序的实践和/或医疗手术程序的训练的方法。模拟器可以包括对整个或部分脉管系统、整个或部分心脏和/或脉管系统的整个或部分组成部分(例如,整个或部分升主动脉)的模拟。对天然组织(例如,天然心脏瓣膜)的提及是指受试者体内预先存在的结构,例如(例如)患者的天然组织或模拟器的部件。
43.图1示出了根据一个实施例的假体心脏瓣膜10,假体心脏瓣膜10可以植入有图2的递送装置100。在一些实施例中,假体心脏瓣膜是自扩张瓣膜,其以径向压缩状态经由递送装置100递送到展开部位。当从递送装置(图2)的远端处的递送囊推进时,假体瓣膜能够径向自扩张至其功能尺寸。
44.假体心脏瓣膜10包括支架或框架12和由框架支撑的瓣膜结构14(例如,小叶或瓣阀)。框架12可具有多个相互连接的支柱16,多个相互连接的支柱16以格子状图案布置并分别在框架12的流入端和流出端20、22处形成多个顶点18。
45.框架12可以包括从框架12的流出端处的相应顶点18延伸的多个成角度间隔的杆24。所示实施例中的框架12包括三个这样的杆24,尽管可以使用更多或更少数量的杆。在一种实施方式中,框架12可以具有从框架的流出端处的所有顶点18延伸的杆。每个杆24可具有孔眼或孔26,孔眼或孔26可用于形成与递送装置100的可释放连接,例如经由使用一条或多条绳或系绳118(参见图3),如下文进一步描述。
46.在一些实施例中,框架12可以没有杆24并且孔26可以被形成在框架的流出端处的顶点18中。在图3所示的实施例中,孔被形成在框架的流出端处,使得当装载在递送装置100内时,可以经由绳118在绳歧管120和框架12的流出端之间形成可释放连接,如下文进一步描述。这种布置便于使用逆行递送途径将假体瓣膜10递送至天然主动脉瓣,由此递送装置100被推进穿过股动脉和主动脉以接近天然主动脉瓣。
47.在其他实施例中,在其他递送装置配置或其他递送技术需要框架的入口端处的孔的情况下(例如经心尖递送途径),孔26(无论是形成在杆24中还是在顶点18中)可以被形成在框架12的入口(或流入)端20处。在更进一步的实施例中,递送装置100可以包括当装载在递送装置内时定位在假体瓣膜远侧的绳歧管120,其中绳歧管耦接到框架的入口(或流入)端20。
48.在特定实施例中,假体心脏瓣膜10是可自扩张心脏瓣膜,其中框架12由本领域已知的超弹性、自扩张材料(例如镍钛合金,如镍钛诺)制成。当与递送装置100(图2)一起使用时,假体瓣膜10在从递送装置的递送囊(例如递送鞘)推进时可以从径向压缩状态自扩张到径向扩张状态。
49.在其他实施例中,框架12可以由各种合适的塑性可扩张材料(例如不锈钢、钴铬合金等)中的任一种制成,并且假体心脏瓣膜可以通过使递送装置的球囊膨胀或通过致动递送装置的其他扩张器具从径向压缩状态扩张到径向扩张状态,并产生假体瓣膜的径向扩张。
50.瓣膜结构14可以包括多个小叶28。瓣膜结构通常包括布置成三尖瓣布置的三个小叶28,尽管可以使用更多或更少数量的小叶28。小叶28可由各种合适的材料中的任一种制
成,包括天然组织(例如,牛心包或来自其他来源的心包)或合成材料(例如,聚氨酯)。相邻小叶的流出边缘(图中的上边缘)处的相邻侧部可以相互固定以形成瓣膜结构的连合部30,连合部30可以用缝线32固定到框架。
51.假体瓣膜10还可包括安装在框架12内部的内裙部34。裙部34有助于在植入后与周围组织建立密封。裙部34还可用于将小叶28的部分安装到框架12。例如,在所示实施例中,小叶的流入边缘(图中的下边缘)可沿着缝合线36缝合到裙部34。裙部34可以直接连接到框架12,例如用缝线。尽管未示出,假体瓣膜10可包括安装在框架外部的外裙部,代替或附加于内裙部34,以进一步抵靠周围组织密封假体瓣膜。内裙部和/或外裙部可由各种合适材料中的任一种制成,包括天然组织(例如,心包组织)或各种合成材料(其可以是织造的、非织造的、编织的、针织的和/或其组合)中的任一种。在一种具体实施方式中,内裙部34由聚对苯二甲酸乙二醇酯(pet)织物制成。
52.在美国专利申请公开第2014/0343670号、第2012/0123529号、2010/0036484和第2010/0049313号中进一步公开了假体心脏瓣膜的示例性配置,上述申请公开的公开内容通过引用并入。
53.假体心脏瓣膜10或其他类型的可植入、可扩张医疗设备(例如可扩张支架)可经由递送装置递送到植入部位。这种递送装置100的示例性实施例在图2-图9b中示出。
54.如图2和图3所示,递送装置100可包括手柄部分132和从手柄部分132向远侧延伸的第一轴134。用户(例如医师或临床医生)可以经由致动位于手柄部分132上的多个旋钮136、拨号盘和/或按钮138来操作递送装置100。第一轴134具有近端部分140和远端部分142。第一轴134的近端部分140可被耦接到手柄部分132。手柄部分132可包括外壳133,外壳133可包括两个外壳部分133a、133b(如图7中最佳所示)。
55.如图3所示,递送装置100可以包括第二轴150和第三轴152。第二轴150从手柄部分132向远侧延伸并且同轴地穿过第一轴134。第三轴152从手柄部分132向远侧延伸并且同轴地穿过第二轴150。在图示中,第一轴134是递送装置的最外轴,因此可以被称为递送装置的外轴134。在所示实施例中,第三轴152是递送装置的最内轴,因此可以被称为递送装置的内轴152。在所示实施例中,第二轴150在最内轴和最外轴中间或之间,因此可以被称为中间轴。
56.鼻锥144可以被连接或安装在内轴152的远端部分152d上。鼻锥144可以具有如图所示的锥形外表面,用于递送装置12穿过受试者的脉管系统的无创伤跟踪。内轴152向远侧延伸超过中间轴150,穿过绳歧管120的管腔并穿过假体瓣膜10。
57.在某些实施例中,第一轴、第二轴和第三轴134、150和152可分别配置为可相对于彼此移动,包括相对轴向移动(在近侧方向和远侧方向上)和/或相对旋转移动(顺时针和逆时针方向上)。导丝154(图4)可以延伸穿过内轴152的中心管腔和鼻锥144的内腔,使得递送装置100可以在假体瓣膜10的递送期间在受试者脉管系统内部的导丝154之上推进。导丝154可以经由手柄部分132的近侧端口155插入内轴152中(图5)。
58.递送囊146被耦接到第一轴134的远端部分142,在鼻锥144的近侧。递送囊146以径向压缩状态将假体瓣膜10容纳在其中,如图3-图4所示。在一个实施例中,递送囊146覆盖并保持图1的下层压缩假体瓣膜。递送装置100特别适用于递送和植入可自扩张假体瓣膜10,该可自扩张假体瓣膜10在从递送囊146展开时在其自身弹性下径向扩张至其功能尺寸。
59.然而,假体心脏瓣膜10可替代地可以是可塑性扩张的假体瓣膜或机械可扩张心脏瓣膜。如果递送装置用于植入可塑性扩张瓣膜,则递送装置可包括本领域已知的用于扩张假体瓣膜的球囊导管,例如美国公开第2009/0281619号中所公开的,该公开通过引用并入本文。如果递送装置用于植入机械可扩张瓣膜,则递送装置可包括用于扩张假体瓣膜的一个或多个致动器,例如2019年12月6日提交的美国申请第62/945,039号中所公开的,该申请通过引用并入本文。
60.如图3所示,递送囊146被配置为容纳处于径向压缩状态以递送到受试者体内的假体心脏瓣膜10或另一种类型的可植入医疗设备。绳歧管120被配置为经由多条绳或系绳118与假体心脏瓣膜10形成可释放连接。绳歧管120被耦接到第一轴134的远端,在鼻锥144和卷曲假体瓣膜10中的每一个的近侧。
61.绳歧管120可以包括近侧部分122和与近侧部分122轴向隔开的远侧部分124。绳歧管120的近侧部分122可以使用合适的技术或机构(例如经由机械连接器、焊接、压配合和/或粘合剂)固定地固定到第一轴134的远端部分142。例如,在一些实施例中,轴134的远端部分142可以延伸到近侧部分的管腔中,该近侧部分可以使用上述任何连接技术固定到轴134。
62.绳118可以由用于受试者体内的各种合适的生物相容材料中的任一种制成。在某些实施例中,绳118可以包括单丝绳或复丝或多股绳,复丝或多股绳通过将多条细丝或股线编织、织造、针织、加捻和缠绕在一起形成。细丝或股线可包括聚合物纤维(例如超高分子量聚乙烯)、尼龙、聚酯和/或芳族聚酰胺,或柔性线材(例如金属线材)。
63.绳118中的每一条可以具有附接到绳歧管120(例如附接到近侧部分122)的第一端部118a。每条绳118延伸穿过假体瓣膜的框架12的开口(例如,穿过开口26)并且可以具有保持在释放构件156上的环形式的第二端部118b。释放构件156被配置为将绳118保持在连接到假体瓣膜10的框架12的状态,直到它们由用户致动以释放绳118。为了说明的目的,示出了两个释放构件156。应当理解,可以使用任意数量的释放构件156。
64.类似地,为了说明的目的,示出了两条绳118,但应当理解,可以使用任何数量的绳。而且,绳和释放构件156的数量不需要相同。例如,多条绳118的端部118b可以被保持在单个释放构件上。理想地,至少三条绳118用于平衡框架12与绳歧管120的附接。在特定实施例中,绳118的数量等于假体瓣膜10的框架12的顶点18的数量(图1)。此外,在其他实施例中,通过形成延伸穿过框架的开口的多个通道,可以使用单条绳在沿着框架的流出端的多个方位处将框架12连接到绳歧管120。
65.每个释放构件156可以以可滑动方式延伸穿过绳歧管120的近侧部分122和远侧部分124中的相应开口。每个释放构件156可以沿着其整个长度延伸穿过第一轴134并且可以具有近端部分,该近端部分被可操作地耦接到手柄上的旋钮136以控制释放构件的移动。释放构件156中的每一个可相对于绳歧管的近侧部分和远侧部分122、124在近侧方向和远侧方向上在每个释放构件156保持相应的绳118的远侧位置和每个释放构件156从相应的绳118释放的近侧位置之间移动。
66.在美国公开第2014/0343670号、第2012/0239142号和第2010/0049313号以及2019年3月27日提交的美国申请第62/824,710号中公开了关于经由一条或多条绳或缝线将假体瓣膜10附接到递送装置100的更多细节,所有这些文件通过引用并入本文。
67.此外,在替代实施例中,可以使用不同的瓣膜保持机构来形成假体瓣膜10和递送装置100之间的可释放连接。例如,在一些实施例中,可以将框架12的杆24保持在递送装置的轴或保持构件的相应凹槽中,当囊146缩回以展开假体瓣膜时,这允许框架的杆从它们相应的凹槽中扩张出来。在其他实施例中,保持机构可以包括在递送装置和假体瓣膜之间形成释放连接的内部和外部金属叉形构件。在2012/0239142和2010/0049313中公开了关于替代性瓣膜保持机构的更多细节。
68.如图3进一步所示,第二轴150可以包括沿着其远端部分的外螺纹部分162。螺纹部分162可以包括形成在轴的外表面上的螺纹或者可以是连接到近侧轴区段的远端的单独的螺杆。囊146通过设置在螺纹部分162上的内螺纹螺母164可操作地连接到第二轴150。螺母164可以具有径向延伸的突出部166,该突出部166延伸到囊146中的相应开口中(见图2)。螺母164的旋转受到从第一轴134的远端部分延伸或沿着第一轴134的远端部分形成的一个或多个导轨165的限制。
69.第二轴150相对于第一轴134的旋转因此产生螺母164的轴向移动(在远侧方向和近侧方向上),这继而在装载期间产生囊146在相同方向上的相应轴向移动,展开和/或重新捕获假体瓣膜。例如,当螺母164处于远侧位置时,递送囊146在假体瓣膜10之上延伸并且将假体瓣膜10保持在压缩状态以用于递送。螺母164在近侧方向上的移动引起递送囊146在近侧方向上移动,从而展开假体瓣膜。第二轴150的旋转可以经由可操作地耦接到第二轴的马达和/或手动控制特征件来实现,如下文进一步描述。
70.在某些实施例中,递送装置12可以包括一个或多个转向机构,该一个或多个转向机构被配置为控制轴134、150、152中的一个或多个的曲率,以辅助递送装置转向通过脉管系统。例如,转向机构可以包括一条或多条偏心定位的拉线,该拉线延伸穿过轴并且可操作地连接到位于手柄部分132上或与手柄部分132相邻的调节机构。调节机构的调节可有效改变拉线的张力,以使轴在给定方向上弯曲或伸直。在一种实施方式中,一条或多条拉线延伸穿过外轴134并且调节机构的调节有效调节外轴134的远端部分和递送装置100的曲率。关于转向机构的进一步细节在美国公开第2007/0005131号和第2013/0030519号中公开,上述公开通过引用并入本文。
71.在某些实施例中,如图6-图11所示,递送装置100是包括容纳在手柄部分132内部的马达168的机动化装置。机动化实施例使假体瓣膜10的展开自动化。特别地,马达168被可操作地耦接到第二轴150以产生第二轴150相对于第一轴134的旋转以及囊146的相应轴向移动,如下文进一步描述。
72.第一轴134的近端部分140可以被耦接到手柄部分132的远端。如图6所示,第二轴150的近端部分151可以经由手柄部分132的远侧开口170延伸到手柄部分132中。可旋转部件172(在一些实施例中可以被称为驱动缸)被设置在手柄部分132内部并且被可操作地耦接到第二轴150。
73.在一个实施例中,如在图7-图9中最佳示出的,可旋转部件的近端部分包括齿轮174,该齿轮174具有相对于彼此周向排列的多个齿轮齿176。可旋转部件172还包括主体178,主体178被配置为具有管腔173(图8)的延伸轴。在所示实施例中,主体178和齿轮174一体地形成,尽管它们可以是用各种附接器具中的任一种连接到彼此的单独形成的部件。可旋转部件172的主体178可以与手柄部分132的中心纵向轴线l-l'(如图5所示)同轴并且还
与第一轴134同轴。主体178的管腔173的尺寸可以被设计成在其中接收和保持第二轴150的近端部分151。
74.在一些实施方式中,管腔173的内表面在垂直于纵向轴线l-l'的平面中可以具有非圆形横截面,并且第二轴150的近端部分151可以具有类似的对应于管腔形状的横截面轮廓,从而可旋转部件172的旋转运动被传递到第二轴150。例如,管腔173和近端部分151可以是大致圆柱形的并且具有一系列周向间隔的平坦区段。代替或附加于提供具有非圆形横截面的管腔173和近端部分151,近端部分151可以用紧固器具(例如机械紧固件(例如螺杆)、粘合剂、压配合、卡扣配合连接等)固定到可旋转部件。
75.如图6最佳所示,马达168可以被保持在保持箱或托架190内部。马达可以是电动马达,并且手柄部分可以包括电池舱,该电池舱包含一个或多个电池(未示出),用于为马达168供电。手柄部分上的一个或多个操作按钮138a、138b允许用户启动马达,例如通过将电流从电池电源电耦接到马达。如下所述,马达可以在任一方向上旋转,从而使囊146在近侧方向或远侧方向上移动。按钮中的一个(例如,按钮138a)可操作以使马达在第一旋转方向上旋转,从而使囊146在远侧方向上移动(例如用于将假体瓣膜装载到囊中),而另一个按钮(例如,按钮138b)可操作以使马达在第二旋转方向上旋转,从而使囊在近侧方向上移动,例如用于展开假体瓣膜。代替或附加于一个或多个电池,马达168可被配置为接收电源线,该电源线从手柄部分外部(例如,壁装插座)的电源向马达供应电流。
76.如图8中最佳所示,马达168可以通过连接到马达轴188的驱动轴184和连接到驱动轴184的中间驱动齿轮182耦接到可旋转部件172。驱动齿轮182可以具有周向排列的齿轮齿192,齿轮齿192可以与可旋转部件172的齿轮174的周向布置的齿轮齿176啮合,如图9a-图9b所示。当被马达驱动时,马达168旋转马达轴188,这进而旋转驱动轴184和驱动齿轮182。驱动齿轮182啮合并旋转可旋转部件172的齿轮174,从而旋转可旋转部件172和第二轴150。驱动齿轮182可以从可旋转部件172的中心轴线和手柄部分132的中心纵向轴线l-l'径向偏移地定位,使得当啮合时,齿轮竖直对齐,如图9a-图9b所示。在进一步的实施例中,一个或多个附加齿轮可以被提供在驱动齿轮和可旋转部件之间以将旋转从马达传递到可旋转部件。
77.在替代实施例中,马达轴188或驱动轴184可以被连接到可旋转部件172而没有任何中间齿轮。例如,马达轴168可以被定位为沿着着轴线l-l'在可旋转部件的近侧,并且马达轴188可以以直接驱动布置连接到可旋转部件172(例如,参见图10的实施例,如下所述)。
78.图9a-图9b示出了手柄部分136的剖视图,描绘了驱动齿轮182的齿轮齿192与可旋转部件172的齿轮齿176的啮合。此外,该图示出了齿轮相对于彼此的竖直对齐。在其他实施例中,可以颠倒定位。齿轮的竖直对齐允许部件可操作地耦接,同时被容纳在手柄部分中的可用的有限空间中。
79.在所示实施例中,容纳马达168和驱动轴184的托架190也可以被配置为支撑可旋转部件172以用于手柄部分内的旋转移动。如图6-图7最佳所示,托架190可具有第一远侧部分194,第一远侧部分194包括环绕可旋转部件172的主体178的远端部分的远侧套筒195。托架190还可具有近侧部分196,近侧部分196包括环绕可旋转部件172的主体178的近端部分的近侧套筒197。
80.参考图3、图8、图9a和图9b,马达168在第一方向(例如顺时针或逆时针)上的旋转
引起可旋转部件172的旋转。这继而引起被耦接到可旋转部件172的第二轴150的旋转。第二轴150的旋转引起第二轴150的螺杆162的旋转。如上所述,螺杆162的旋转产生驱动螺母164和囊146(图3)的轴向移动。例如,可旋转部件在第一方向上的旋转可引起递送囊146在近侧方向上缩回并在递送装置的远端处露出假体瓣膜。相反,马达在与第一方向相反的第二方向上的旋转引起第二轴150在相反方向上旋转,这使螺母在相反方向上轴向移动,从而使递送囊在远侧方向上移回到假体瓣膜之上。操作者可致动手柄部分上的按钮138a、138b(图6)以启动马达,并以机动化方式轴向移动递送囊。这允许快速展开或收回假体瓣膜。
81.在使用中,假体瓣膜10可以被连接到递送装置100并如下装载到囊中。可以在框架12的一个端部处的每个顶点18和具有单独的绳118的绳歧管120之间形成可释放连接。可选地,绳118的长度被选择为使得框架的固定端被绳保持在至少部分径向压缩的状态。在用绳118固定框架12的端部之后,递送囊146可以向远侧推进(例如,通过按下按钮138a)越过绳歧管120、绳118和框架12,使框架在囊146的作用下塌陷至径向压缩状态(如图4所示)。递送囊146向远侧推进,直到递送囊146的远端邻接鼻锥144以完全包围假体瓣膜10,如图3所示。
82.在如上所述将假体心脏瓣膜10装载到递送装置12内之后,递送装置可以被插入脉管系统中并且推进或导航通过脉管系统到期望的植入部位(例如,当以逆行递送途径将假体瓣膜10递送到天然主动脉瓣时通过股动脉和主动脉)。
83.一旦假体瓣膜10被递送到受试者体内的选定植入部位(例如,天然主动脉瓣),鼻锥144可选地可以通过向远侧推动内轴152而向远侧远离囊146的相邻端推进,以避免在瓣膜展开期间假体瓣膜和鼻锥之间的接触。递送囊146可缩回(例如,通过按下按钮138b)以展开假体瓣膜10。随着递送囊146缩回(图4),假体瓣膜可在框架12的弹性作用下径向自扩张。在递送囊146从假体瓣膜10完全缩回之后,假体瓣膜仍然通过绳118附接到递送装置12。在仍然附接到递送装置的同时,用户可以操纵递送装置(例如,通过在近侧方向和远侧方向移动它和/或旋转它)来调节假体瓣膜相对于期望植入方位的位置。
84.如果需要,递送囊可以被推进回到假体瓣膜10之上,以完全或部分地重新捕获假体瓣膜(将假体瓣膜带回囊内),以便于假体瓣膜的重新定位。例如,在以逆行递送途径穿过天然主动脉瓣小叶并展开假体瓣膜后,可能需要将假体瓣膜重新捕获回囊内,缩回递送装置以将假体瓣膜带回主动脉内,以及然后将假体瓣膜推回穿过天然主动脉瓣小叶,并从囊展开假体瓣膜。
85.一旦假体瓣膜从囊146展开并定位在期望植入方位处,释放构件156可以缩回,例如通过旋转手柄部分132上的旋钮136。在一些情况下,当释放构件156缩回时,绳118借助自扩张框架12进一步扩张而从孔26向外滑动并将自身从框架12释放。在其他情况下,用户可以稍微缩回递送装置100,这进而相对于框架12向近侧拉动绳118以将它们拉出孔26。
86.可选地,假体瓣膜的取向可以颠倒,使得当耦接到递送装置时假体瓣膜的流入端是近端,而假体瓣膜的流出端是远端。这能够便于将假体瓣膜递送到不同的植入方位(例如,天然主动脉、肺、二尖瓣和三尖瓣环)和/或用于各种递送途径(例如,顺行、经间隔、经心室、经心房)。
87.如上所讨论,可旋转部件172的旋转移动产生第二轴150和递送囊146的轴向移动。虽然可旋转部件172的旋转可能受到马达168的影响,但也可以手动实现旋转。
88.为此,递送装置100可以被提供有手动展开工具,该手动展开工具能够在马达或电
池发生故障的情况下使可旋转部件被手动操作,并且使假体瓣膜被展开或重新捕获。例如,如果马达或电池在用户正在操作马达以旋转可旋转部件的过程中发生故障,则用户只有有限的时间来完成递送囊的缩回或重新捕获假体瓣膜。这种手动展开工具200的示例性实施例在图7、图9a和图9b中示出。
89.如在图5-图9中最好地示出,手柄部分132可包括外壳133中的一个或多个开口202,手动展开工具200可插入穿过该一个或多个开口202以手动旋转可旋转部件172。在所描绘实施例中,手动展开工具200是拉绳的形式(也可以被称为拉带或带齿构件)。为了手动操作可旋转部件172,拉绳200被插入开口202中并沿着轴线m-m'拉过手柄部分136,轴线m-m'可以偏移于手柄部分的纵向轴线l-l'(图7和图9a)。如图7和图9a-图9b所示,拉绳200可以在基本上垂直于手柄部分132的纵向轴线(例如,纵向轴线l-l')的方向上插入穿过开口202。在所描绘实施例中,手动展开工具200是可从递送装置的手柄部分132分离(例如,可插入和可移除)的拉绳。
90.在一些实施例中,手柄部分132可包括可移除的盖或塞子,可移除的盖或塞子在外壳133中的开口202之上延伸并覆盖外壳133中的开口202。盖可在正常使用期间保持就位,直到需要拉绳200,此时盖子可以被移除以提供对开口202的接近。
91.如图9a-图9b所示,拉绳200的至少一部分205包括多个齿204,多个齿204被配置为当拉绳200被拉过手柄部分132中的开口202时驱动地啮合可旋转部件172的多个齿轮齿176。以这种方式,拉绳200起到线性齿条的作用,当拉绳沿着轴线m-m'线性移动时,拉绳200产生可旋转部件172的旋转。如图7所示,拉绳200可以沿着拉绳200的大部分长度具有齿204。
92.拉绳200可以具有在大约12英寸到大约36英寸的范围内、在大约16英寸到大约30英寸的范围内或在大约17英寸到大约20英寸的范围内的长度。在一些实施例中,拉绳200的总长度可以是18英寸。
93.拉绳200可以由各种合适的材料(包括金属、聚合物等)中的任何一种制成。在一些实施例中,拉绳200可以由模制塑料制成并且可以具有连接两个直部分212的弯曲部分210,如图7所示。拉绳200可以足够柔韧,使得弯曲部分210可以在拉绳200被拉过手柄部分132中的开口202时伸直。在一些实施例中,拉绳200从拉绳的一个端部到另一端部沿其长度可以是直的。在其他实施例中,拉绳200可模制成盘绕或螺旋形状,当拉绳200被拉过手柄部分132中的开口202时可解开或伸直。此外,在一些实施例中,拉绳200可足够刚性使得它可以在使用期间被推过手柄部分132,代替或附加于被拉过手柄部分。无论拉绳是被推过还是拉过手柄部分,手动移动拉绳穿过手柄部分都操作可旋转部件172,如下文进一步描述的。
94.在一些实施例中(参见图9a),拉绳的至少一个端部部分206可以没有任何齿204并且可以具有面向齿轮齿176的平坦表面,如图所示。端部部分206的尺寸可以合乎需要地设计成使得它能够在不接触齿轮齿176的情况下插入穿过开口202,或者至少在齿轮齿176的阻力最小的情况下容易地插入穿过。这允许端部部分206在拉绳200的任何齿204啮合齿轮齿176之前更容易地从手柄部分的一侧(图9a-9b中的左侧)插入穿过开口202到手柄部分的另一侧(图9a-图9b中的右侧)。当端部部分206从手柄部分132的另一侧(图9a-图9b中的右侧)露出时,端部部分206然后可以被用户抓住以拉动拉绳200进一步穿过开口202(在图9a-图9b中向右),直到齿204啮合齿轮齿176。
95.拉绳200在第一方向(例如,沿着m-m'的第一方向)上穿过开口202的移动使可旋转部件172在第一旋转方向上(例如,顺时针或逆时针)旋转,同时拉绳200在与第一方向相反的第二旋转方向(例如,沿着m-m'的相反方向)上穿过开口的移动使可旋转部件172在与第一方向相反的第二方向上旋转。由于可旋转部件的旋转导致递送囊的轴向移动,因此拉绳沿着轴线m-m'在第一方向上的移动可用于缩回递送囊146并展开假体瓣膜10,同时拉绳沿着轴线m-m'在第二方向上的移动可用于向远侧推进递送囊146并重新捕获假体瓣膜10。
96.在假体瓣膜递送手术程序期间,用户可以用递送装置100将假体瓣膜10插入受试者体内,其中假体瓣膜10如前所述以径向压缩状态保持在递送囊146内。然后用户可以操作电子开关(例如,按钮138b)以致动容纳在递送装置的手柄部分132中的马达168。如果马达无法旋转和产生递送囊146的轴向移动,则用户可以将拉绳200插入并拉过手柄部分132的开口202(例如,在图9a-图9b中从左到右)以产生手柄部分132内部的可旋转部件172的旋转。这继而旋转第二轴150并产生递送囊146在近侧方向上相对于假体瓣膜的轴向移动,以从递送囊展开假体瓣膜,并且允许假体瓣膜从径向压缩状态径向扩张到径向扩张状态。在一些实施例中,一旦假体瓣膜从递送装置100径向扩张并展开,则拉绳200可以从手柄部分132移除。
97.如果在植入手术程序期间,马达未能完全缩回和展开假体瓣膜并且期望将假体瓣膜重新捕获回递送囊内,则拉绳200可以在相反方向(例如,在图9a-图9b中从右到左)上插入开口202中并被拉过开口,以使可旋转部件在相反方向上旋转并产生递送囊146在远侧方向上的轴向移动以将递送囊移回到假体瓣膜之上。一旦假体瓣膜在递送囊内,递送装置100可用于重新定位假体瓣膜以用于展开,或者可将其完全从身体中撤出。
98.以这种方式,手动展开工具被提供用于手动操作递送装置的可旋转部件,该可旋转部件使得递送囊能够轴向移动。因此,如果驱动可旋转部件的马达在瓣膜展开手术程序期间发生故障,则用户可以通过操作手动展开工具来驱动可旋转部件并完成该手术程序。以这种方式,手动展开工具充当简单的备用或应急工具,确保植入手术程序的更高完成效率。
99.在替代实施例中,拉绳200可以在与驱动齿轮182而不是驱动齿轮174啮合的方位处延伸穿过手柄部分132的外壳133。在这样的实施例中,拉绳200以与上述相同的方式使用,除了拉绳200被拉过外壳以旋转齿轮182,继而旋转齿轮174和可旋转部件172之外。
100.图10示出了根据另一个实施例的可以通过拉绳200操作的机动化递送装置300。所示实施例中的递送装置300包括手柄部分302、从手柄部分302向远侧延伸的第一外轴304、从手柄部分302向远侧延伸穿过第一轴304的第二中间轴306以及从手柄部分302向远侧延伸穿过第二轴306的第三内轴308。鼻锥310可以被安装在内轴308的远端部分上。
101.在图10的实施例中,第一轴304的远端部分312用作递送囊。假体瓣膜10可以使用上述任何保持机构可释放地连接到第二轴306的远端部分。通过使第一轴304相对于假体瓣膜和第二轴306缩回,假体瓣膜10可以从递送囊312展开。
102.手柄部分302可以容纳马达314,马达314具有连接到导螺杆318的轴316。导螺杆318可以具有外螺纹部分320,外螺纹部分320延伸穿过并可螺纹接合第一轴304的延伸部分322的螺纹开口。延伸部分322用作螺母,当导螺杆旋转时,该螺母能够在近侧方向和远侧方向上行进。手柄部分302可以具有结合递送装置100的描述的用于操作马达314的其他特征。
例如,手柄部分302可以容纳一个或多个电池并且可以具有一个或多个按钮或开关(例如,按钮138a、138b)以用于致动马达314。
103.在植入手术程序期间,一旦假体瓣膜定位在植入部位,则用户可以通过向远侧推动内轴308来向远侧推进鼻锥310远离递送囊312。用户可致动马达314(例如通过按下按钮138b),马达314旋转导螺杆318并在近侧方向上(图10中向右)缩回第一轴304并露出假体瓣膜。如果需要重新捕获和/或重新定位,则在相反方向上操作马达314(例如通过按下按钮138a),使导螺杆在相反方向上旋转并且将第一轴304移回假体瓣膜之上。
104.为了手动操作导螺杆318,具有多个齿轮齿的齿轮324可以被安装在导螺杆318上。手柄部分302可以包括开口,以在拉绳200的齿204能够与齿轮324的齿啮合的方位处接收拉绳200。在第一方向上将拉绳200拉过手柄部分302有效地在第一旋转方向上旋转齿轮324和导螺杆318以缩回第一轴304。在与第一方向相反的第二方向上将拉绳200拉过手柄部分302有效地在第二旋转方向上旋转导螺杆318以在远侧方向上移动第一轴304。
105.在替代实施例中,代替齿轮324,齿轮齿可以被直接提供在导螺杆的外表面上,用于啮合拉绳的齿204。
106.此外,应当注意,递送装置100、300的任何可移动部件都可以被配置为由拉绳200操作。在一种实施方式中,例如,导螺杆318可以接合第二轴306延伸部分,在这种情况下,可以通过将第二轴306和假体瓣膜10相对于第一轴304向远侧移动来展开假体瓣膜10。马达314和拉绳200可以用于产生第二轴306在远侧方向和近侧方向上的移动,这取决于假体瓣膜是要被展开还是要被重新捕获回到囊312中。
107.在替代实施例中,拉绳200可以具有其他配置。例如,在一种实施方式中,拉绳200可以具有沿着拉绳两侧的齿204。在另一种实施方式中,代替齿204,拉绳200可以具有沿着拉绳的长度螺旋地延伸的外螺纹(类似于螺杆)。被设计成啮合拉绳的齿轮(例如,齿轮174)或其他递送装置部件可以具有与拉绳的螺旋螺纹匹配的相应特征,并且当拉绳相对于递送装置部件被拉动时产生递送装置部件的旋转。
108.被配置为拉绳400的手动展开工具的另一个示例性实施例在图11中示出。拉绳400可以类似于拉绳200(如上面参考图7、图9a和图9b所描述的)而配置并且功能可以类似于拉绳200,以从递送装置(例如递送装置100或300)手动展开假体瓣膜。
109.如图11所示,拉绳400沿其长度从拉绳400的一端到另一端的是直的(例如,没有曲线、弯曲或盘绕)。例如,拉绳400具有直主体402,直主体402包括设置在两个端部部分406之间的中间部分404。中间部分404包括多个齿408(例如,类似于图7、图9a和图9b中所示的拉绳200的齿204)。端部部分406不包括齿并且具有相对光滑的(例如,无齿的)表面410。
110.在替代实施例中,拉绳400可以仅包括一个无齿端部部分406,并且拉绳400的其余部分可以包括齿408。
111.拉绳400可以具有在大约12英寸至大约36英寸的范围内、大约16英寸至大约30英寸的范围内或大约17英寸至大约20英寸的范围内的长度。在一些实施例中,拉绳400的总长度可以是18英寸。
112.图12示出了被配置为拉绳500的手动展开工具的另一个示例性实施例。拉绳500可以类似于拉绳200(如上文参考图7、图9a和图9b所述)而配置并且功能可以类似于拉绳200,以从递送装置(例如递送装置100或300)手动展开假体瓣膜。
113.如图12所示,拉绳500被成形为线圈或螺旋形。换句话说,拉绳500可以沿其长度的至少一部分盘绕。例如,拉绳500可以被模制成盘绕或螺旋形状,当它被拉过递送装置的手柄部分中的开口(例如,递送装置100的手柄部分132中的开口202)时,它可以解开或伸直。拉绳500包括主体502,主体502包括盘绕的带齿部分504和端部部分506。带齿部分504是盘绕的并且包括沿其长度的多个齿508。端部部分506不包括齿并且具有相对光滑的(例如,无齿的)表面510。在一些实施例中,如图12所示,端部部分506是直的(例如,不是盘绕的)。
114.拉绳500可以具有在大约12英寸至大约36英寸的范围内、大约16英寸至大约30英寸的范围内或大约17英寸至大约20英寸的范围内的长度。
115.在替代选实施例中,拉绳(例如拉绳200、400或500)可用于操作不包括马达的递送装置部件。例如,递送装置100、300可以没有马达168、314,而是可以仅通过使用拉绳从递送囊146、312展开假体瓣膜10。
116.最后,应该注意的是,使用拉绳(例如拉绳200、400或500)的一般概念可用于在手柄内部有或没有马达的情况下产生具有手柄和手柄内部的可旋转部件的医疗装置的可移动部件的移动。拉绳可以被配置为引起可旋转部件的旋转,这进而引起医疗装置的可移动部件的轴向移动。可移动部件可以是如上所述的递送囊或医疗装置的另一部件,例如轴、导丝或在拉绳致动时在身体内部移动或展开的器械。
117.公开技术的其他示例
118.鉴于所公开主题的上述实施方式,本技术公开了以下列举的附加示例。应当注意,单独的示例的一个特征或组合的以及任选地与一个或多个进一步的示例的一个或多个特征组合的示例的多于一个的特征是也落入本技术的公开内容内的进一步的示例。
119.示例1.一种用于可扩张、可植入医疗设备的递送装置,该递送装置包括:手柄部分;从手柄部分延伸的轴;递送囊,其被配置为容纳处于径向压缩状态以递送到受试者体内的医疗设备;可旋转部件,其设置在手柄部分中并且可操作地耦接到递送囊,以在可旋转部件旋转时产生递送囊相对于轴的轴向移动;马达,其设置在手柄部分中并且可操作地耦接到可旋转部件以产生可旋转部件的旋转和递送囊的相应轴向移动;以及拉绳,其被配置为当手动拉力被施加到拉绳以相对于可旋转部件拉动拉绳时产生可旋转部件的旋转和递送囊的相应轴向移动。
120.示例2.根据本文任何示例,特别是示例1所述的递送装置,其中轴是第一轴并且递送装置还包括延伸穿过第一轴的第二轴,其中第二轴具有可操作地耦接到可旋转部件的近端部分和可操作地耦接到递送囊的远端部分,使得可旋转部件的旋转使第二轴相对于第一轴旋转并产生递送囊的轴向移动。
121.示例3.根据本文任何示例,特别是示例1所述的递送装置,其中递送囊被连接到轴的远端部分,并且可旋转部件被可操作地耦接到轴的近端部分,使得可旋转部件的旋转产生轴和递送囊的轴向移动。
122.示例4.根据本文任何示例,特别是示例1-3中任一个所述的递送装置,其中手柄部分包括用于将拉绳插入穿过手柄部分的开口。
123.示例5.根据本文任何示例,特别是示例4所述的递送装置,其中拉绳被配置为在基本上垂直于手柄部分的纵向轴线的方向上被拉过开口以产生可旋转部件的旋转。
124.示例6.根据本文任何示例,特别是示例4或5所述的递送装置,其中拉绳在第一方
向上穿过开口的移动使可旋转部件在第二方向上旋转,以产生递送囊在第三近侧方向上的移动,并且拉绳在与第一方向相反的第四方向上穿过开口的移动使可旋转部件在与第二方向相反的第五方向上旋转,以产生递送囊在第六远侧方向上的移动。
125.示例7.根据本文任何示例,特别是示例1-6中任一个所述的递送装置,其中马达是由被容纳在手柄部分中的至少一个电池供电的电致动马达。
126.示例8.根据本文任何示例,特别是示例1-7中任一个所述的递送装置,其中拉绳从手柄部分可移除。
127.示例9.根据本文任何示例,特别是示例1-8中任一个所述的递送装置,其中可旋转部件包括多个齿轮齿,并且其中拉绳包括被配置为驱动地啮合可旋转部件的齿轮齿的多个齿。
128.示例10.根据本文任何示例,特别是示例9所述的递送装置,还包括驱动齿轮,该驱动齿轮耦接到马达并且包括啮合可旋转部件的齿轮齿的多个齿。
129.示例11.根据本文任何示例,特别是示例9或10所述的递送装置,其中拉绳包括没有齿的至少一个端部部分。
130.示例12.根据本文任何示例,特别是示例1-11中任一个所述的递送装置,其中拉绳包括中间部分和没有齿的两个端部部分,中间部分包括多个齿,中间部分设置在两个端部部分之间。
131.示例13.根据本文任何示例,特别是示例1-12中任一个所述的递送装置,其中拉绳沿其长度是直的。
132.示例14.根据本文任何示例,特别是示例1-12中任一个所述的递送装置,其中拉绳沿其长度的至少一部分盘绕,并且其中拉绳的盘绕部分包括多个齿。
133.示例15.根据本文任何示例,特别是示例1-12中任一个所述的递送装置,其中拉绳包括设置在两个直部分之间的弯曲部分。
134.示例16.根据本文任何示例,特别是示例1-15中任一个所述的递送装置,其中拉绳具有在16英寸至30英寸的范围内的长度。
135.示例17.一种用于可扩张、可植入医疗设备的递送装置,该递送装置包括:手柄部分;从手柄部分延伸的轴;递送囊,其被配置为容纳处于径向压缩状态以递送到受试者体内的医疗设备;可旋转部件,其设置在手柄部分中并且可操作地耦接到递送囊以在可旋转部件旋转时产生递送囊相对于轴的轴向移动,其中可旋转部件包括多个周向排列的齿轮齿;马达,其设置在手柄部分中并且可操作地耦接到可旋转部件以产生可旋转部件的旋转和递送囊的相应轴向移动;以及手动展开工具,其包括被配置为啮合可旋转部件的齿轮齿的多个驱动齿,其中展开工具可沿着延伸穿过手柄部分的轴线手动移动,以产生可旋转部件的旋转和递送囊的相应轴向移动。
136.示例18.根据本文任何示例,特别是示例17所述的递送装置,其中展开工具的轴线偏移于可旋转部件的旋转轴线。
137.示例19.根据本文任何示例,特别是示例18所述的递送装置,其中展开工具的轴线垂直于手柄部分的纵向轴线。
138.示例20.根据本文任何示例,特别是示例17-19中任一个所述的递送装置,还包括耦接到马达的驱动齿轮,其中驱动齿轮啮合可旋转部件的齿轮齿。
139.示例21.根据本文任何示例,特别是示例17-20中任一个所述的递送装置,其中可旋转部件包括驱动缸,驱动缸包括主体并且齿轮齿被设置在主体的外表面上。
140.示例22.根据本文任何示例,特别是示例21所述的递送装置,其中轴是第一轴并且递送装置还包括延伸穿过第一轴的第二轴,其中第二轴具有耦接到可旋转部件的主体的近端部分和可操作地耦接到递送囊的远端部分,使得可旋转部件的旋转使第二轴相对于第一轴旋转并产生递送囊的轴向移动。
141.示例23.根据本文任何示例,特别是示例22所述的递送装置,进一步包括设置在第二轴的远端部分的螺纹部分上的驱动螺母,其中驱动螺母被连接到递送囊,使得第二轴相对于第一轴的旋转产生驱动螺母和递送囊的轴向移动。
142.示例24.根据本文任何示例,特别是示例17-23中任一个所述的递送装置,其中手动展开工具是拉绳。
143.示例25.一种将医疗设备植入受试者体内的方法,该方法包括:用递送装置将医疗设备插入受试者体内,其中该医疗设备以径向压缩状态保持在递送装置的递送囊内,其中递送装置包括手柄部分和容纳在手柄部分中的可旋转部件;以及将拉绳拉过手柄部分以产生可旋转部件的旋转,这继而产生递送囊相对于医疗设备的轴向移动,以从递送囊展开医疗设备并允许医疗设备从径向压缩状态径向扩张到径向扩张状态。
144.示例26.根据本文任何示例,特别是示例25所述的方法,其中递送装置包括马达,该马达可操作地耦接到可旋转部件以产生可旋转部件的旋转和递送囊的相应轴向移动,并且该方法进一步包括在拉动拉绳的动作之前,操作电子开关以致动马达,并且如果马达不能产生递送囊的移动,则将拉绳拉过手柄部分。
145.示例27.根据本文任何示例,特别是示例25-26中任一个所述的方法,其中医疗设备包括假体心脏瓣膜,并且将医疗设备插入受试者体内的动作包括在保持在递送囊中的同时推进假体心脏瓣膜穿过受试者的脉管系统,直到假体心脏瓣膜在心脏的天然瓣膜环处或与心脏的天然瓣膜环相邻。
146.示例28.根据本文任何示例,特别是示例25-27中任一个所述的方法,其中沿着垂直于手柄部分的纵向轴线的轴线拉动拉绳。
147.示例29.根据本文任何示例,特别是示例25-27中任一个所述的方法,其中沿着偏移于可旋转部件的旋转轴线的轴线拉动拉绳。
148.示例30.根据本文任何示例,特别是示例25-29中任一个所述的方法,其中拉绳包括多个齿,当拉绳被拉过手柄部分时,所述多个齿啮合可旋转部件的多个齿。
149.示例31.根据本文任何示例,特别是示例26所述的方法,其中递送装置包括耦接到马达的驱动齿轮,其中驱动齿轮啮合可旋转部件的齿轮齿。
150.示例32.一种将医疗设备植入受试者体内的方法,该方法包括:用递送装置将医疗设备插入受试者体内,其中医疗设备以径向压缩状态保持在递送装置的递送囊内,其中递送装置包括手柄部分和容纳在手柄部分中的可旋转部件;操作电子开关以致动可操作地耦接到可旋转部件的马达;以及如果马达不能产生递送囊的移动,则将拉绳拉过手柄部分以产生可旋转部件的旋转,这继而产生递送囊在第一方向上相对于医疗设备的轴向移动,以从递送囊展开医疗设备并允许医疗设备从径向压缩状态径向扩张到径向扩张状态;或者如果马达在医疗设备从递送囊部分地展开时发生故障,则将拉绳拉过手柄部分以产生可旋转
部件的旋转,这继而产生递送囊在第二方向上相对于医疗设备的轴向移动设备,以重新捕获部分地展开的医疗设备。
151.示例33.根据本文任何示例,特别是示例32所述的方法,其中医疗设备包括假体心脏瓣膜并且将医疗设备插入受试者体内的动作包括在保持在递送囊中的同时推进假体心脏瓣膜穿过受试者的脉管系统,直到假体心脏瓣膜在心脏的天然瓣膜环处或与心脏的天然瓣膜环相邻。
152.示例34.根据本文任何示例,特别是示例32-33中任一个所述的方法,其中沿着垂直于手柄部分的纵向轴线的轴线拉动拉绳。
153.示例35.根据本文任何示例,特别是示例32-33中任一个所述的方法,其中沿着偏移于可旋转部件的旋转轴线的轴线拉动拉绳。
154.示例36.根据本文任何示例,特别是示例32-35中任一个所述的方法,其中拉绳包括多个齿,当拉绳被拉过手柄部分时,所述多个齿啮合可旋转部件的多个齿。
155.示例37.根据本文任何示例,特别是示例32-36中任一个所述的方法,其中拉绳从手柄部分可移除。
156.示例38.一种用于可扩张、可植入医疗设备的递送装置,该递送装置包括:手柄部分;递送囊,其被配置为容纳处于径向压缩状态以递送到受试者体内的医疗设备;可旋转部件,其设置在手柄部分中并且可操作地耦接到递送囊,以在可旋转部件旋转时产生递送囊相对于手柄部分的轴向移动;以及拉绳,其被配置为当手动拉力被施加到拉绳以相对于可旋转部件拉动拉绳时产生可旋转部件的旋转和递送囊的相应轴向移动。
157.示例39.根据本文任何示例,特别是示例38所述的递送装置,还包括马达,该马达设置在手柄部分中并且可操作地耦接到可旋转部件以产生可旋转部件的旋转和递送囊的相应轴向移动。
158.示例40.根据本文任何示例,特别是示例38-39中任一个所述的递送装置,其中手柄部分包括用于将拉绳插入穿过手柄部分的开口。
159.示例41.根据本文任何示例,特别是示例40所述的递送装置,其中拉绳被配置为在基本上垂直于手柄部分的纵向轴线的方向上被拉过开口以产生可旋转部件的旋转。
160.示例42.根据本文任何示例,特别是示例39-41中任一个所述的递送装置,其中马达是由被容纳在手柄部分中的至少一个电池供电的电致动马达。
161.示例43.根据本文任何示例,特别是示例38-42中任一个所述的递送装置,其中拉绳可从手柄部分移除。
162.示例44.根据本文任何示例,特别是示例38-43中任一个所述的递送装置,其中可旋转部件包括多个齿轮齿,并且其中拉绳包括被配置为驱动地啮合可旋转部件的齿轮齿的多个齿。
163.示例45.根据本文任何示例,特别是示例44所述的递送装置,其中拉绳包括没有齿的至少一个端部部分。
164.示例46.根据本文任何示例,特别是示例44所述的递送装置,其中拉绳包括中间部分和没有齿的两个端部部分,中间部分包括多个齿,中间部分设置在两个端部部分之间。
165.示例47.根据本文任何示例,特别是示例44-46中任一个所述的递送装置,其中拉绳沿其长度是直的。
166.示例47.根据本文任何示例,特别是示例44-46中任一个所述的递送装置,其中拉绳沿其长度的至少一部分盘绕,并且其中拉绳的盘绕部分包括多个齿。
167.示例48.根据本文任何示例,特别是示例44-46中任一个所述的递送装置,其中拉绳包括设置在两个直部分之间的弯曲部分。
168.示例49.根据本文任何示例,特别是示例38-48中任一个所述的递送装置,其中拉绳具有在16英寸至30英寸的范围内的长度。
169.示例50.根据本文任何示例,特别是示例38-49中任一个所述的递送装置,还包括从手柄部分延伸的轴,该轴具有连接到手柄部分的近端部分和耦接到递送囊的远端部分。
170.示例51.一种用于插入受试者体内的医疗装置,该医疗装置包括:手柄部分;被配置为插入受试者体内的可移动部件;可旋转部件,其设置在手柄部分中并且可操作地耦接到可移动部件,以在可旋转部件旋转时产生可移动部件相对于手柄部分的轴向移动;以及拉绳,其被配置为当手动拉力被施加到拉绳以相对于可旋转部件拉动拉绳时产生可旋转部件的旋转和可移动部件的相应轴向移动。
171.示例52.根据本文任何示例,特别是示例51所述的医疗装置,其中可移动部件包括递送囊,递送囊被配置为将可植入医疗设备保持在径向压缩状态以递送到受试者体内。
172.示例53.根据本文任何示例,特别是示例51-52中任一个所述的医疗装置,进一步包括马达,其设置在手柄部分中并且可操作地耦接到可旋转部件以产生可旋转部件的旋转和可移动部件的相应轴向移动。
173.示例54.根据本文任何示例,特别是示例53所述的医疗装置,其中马达是由被容纳在手柄部分中的至少一个电池供电的电致动马达。
174.示例55.根据本文任何示例,特别是示例51-54中任一个所述的医疗装置,其中手柄部分包括用于将拉绳插入穿过手柄部分的开口。
175.示例56.根据本文任何示例,特别是示例55所述的医疗装置,其中拉绳被配置为在基本上垂直于手柄部分的纵向轴线的方向上被拉过开口以产生可旋转部件的旋转。
176.示例57.根据本文任何示例,特别是示例51-56中任一个所述的医疗装置,其中拉绳可从手柄部分移除。
177.示例58.根据本文任何示例,特别是示例51-57中任一个所述的医疗装置,其中可旋转部件包括多个齿轮齿,并且其中拉绳包括被配置为驱动地啮合可旋转部件的齿轮齿的多个齿。
178.示例59.根据本文任何示例,特别是示例58所述的医疗装置,其中拉绳包括没有齿的至少一个端部部分。
179.示例60.根据本文任何示例,特别是示例58所述的医疗装置,其中拉绳包括中间部分和没有齿的两个端部部分,中间部分包括多个齿,中间部分设置在两个端部部分之间。
180.示例61.根据本文任何示例,特别是示例58-60中任一个所述的医疗装置,其中拉绳沿其长度是直的。
181.示例62.根据本文任何示例,特别是示例58-60中任一个所述的医疗装置,其中拉绳沿其长度的至少一部分盘绕,并且其中拉绳的盘绕部分包括多个齿。
182.示例63.根据本文任何示例,特别是示例58-60中任一个所述的医疗装置,其中拉绳包括设置在两个直部分之间的弯曲部分。
183.示例64.根据本文任何示例,特别是示例51-63中任一个所述的医疗装置,其中拉绳具有在16英寸至30英寸的范围内的长度。
184.示例65.一种使用医疗装置的方法,该方法包括:将医疗装置的可移动部件插入受试者体内,其中医疗装置包括手柄部分和手柄部分中的可旋转部件;以及将拉绳拉过手柄部分以产生可旋转部件的旋转和可移动部件的相应轴向移动。
185.示例66.根据本文任何示例,特别是示例65所述的方法,其中可移动部件包括递送囊,该递送囊将可植入医疗设备保持在径向压缩状态,并且将拉绳拉过手柄部分使递送囊相对于可植入医疗设备移动,以便从递送囊展开可植入医疗设备。
186.示例67.根据本文任何示例,特别是示例66所述的方法,其中可植入医疗设备包括假体心脏瓣膜,并且将医疗装置的可移动部件插入受试者体内的动作包括在保持在递送囊中的同时推进假体心脏瓣膜穿过受试者的脉管系统,直到假体心脏瓣膜在心脏的天然瓣膜环处或与心脏的天然瓣膜环相邻。
187.示例68.根据本文任何示例,特别是示例65-67中任一个所述的方法,其中医疗装置包括马达,马达可操作地耦接到可旋转部件以产生可旋转部件的旋转和可移动部件的相应轴向移动,并且该方法还包括在拉动拉绳的动作之前,操作电子开关以致动马达,并且如果马达不能产生可移动部件的移动,则将拉绳拉过手柄部分。
188.示例69.根据本文任何示例,特别是示例25-37、65-68中任一个所述的方法,其中受试者是医疗患者、动物模型、尸体和/或心脏和脉管系统的模拟器。
189.示例70.根据本文任何示例,特别是示例25-37、65-69中任一个所述的方法,其中该方法作为在心脏和脉管系统的尸体或模拟器内的训练或实践手术程序来执行。
190.鉴于可以应用所公开技术的原理的许多可能的实施例,应该认识到所示实施例仅是所公开技术的优选示例并且不应被视为限制所要求保护的主题的范畴。相反,所要求保护的主题的范畴由以下权利要求及其等效物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。