1.本发明属于齿形测量技术领域,具体涉及一种基于机器视觉的装甲车辆主动轮盘齿形测量装置。
背景技术:
2.视觉检测是一种通过机器视觉设备提取目标图像信号代替人眼或量具进行测量和判断的有效手段。它是产品制造过程中的重要质量保障手段之一。目前,机器视觉已被广泛应用于各种自动化加工设备中,它可以实现零件尺寸、位置的测量,产品外观和缺陷的检查,文字识别,二维码、条形码识别等。
3.但是当前,机器视觉的尺寸测量在中小型零件上的应用较多,而大型零件基本都还靠人工测量,没能实现自动化和数字化。究其原因,主要是因为大型零件体积大,重量重,零件的装夹定位困难,而且在保证测量精度的前提下,机器视觉难以扫描整个零件。以图1所示的某特种车辆主动轮盘为例。此驱动轮直径超过0.5米,重量大约20~30kg,共有13个齿(共26个齿面)。按照工艺要求,加工完成后需检验驱动轮的每个齿形的外轮廓,确保其满足图纸尺寸要求。针对该零件,传统的检测方法为工人拿着量规依次测量每个齿的外形轮廓。工人需要多次搬运工件,工作量极大。
4.目前特种车辆主动轮盘齿形测量过程存在如下缺陷:1)自动化程度低,基本还依赖人工测量,零件尺寸大,重量重,工人测量难度大,工作强度大;2)人工检测,零件质量信息没能存档,不能实现统计过程控制和数字化加工;3)零件尺寸较大,机器视觉难以兼顾测量精度和视野范围。
技术实现要素:
5.(一)要解决的技术问题
6.本发明提出一种基于机器视觉的装甲车辆主动轮盘齿形测量装置,以解决如何实现特种车辆主动轮盘的自动上下料及齿形轮廓自动测量,尺寸信息自动采集和质量信息自动存档的技术问题。
7.(二)技术方案
8.为了解决上述技术问题,本发明提出一种基于机器视觉的装甲车辆主动轮盘齿形测量装置,该主动轮盘齿形测量装置包括上料料仓、搬运机器人系统、视觉检测系统和下料料仓;其中,上料料仓用于对主动轮盘进行定位;搬运机器人系统用于将主动轮盘在上料工位、测量工位和下料工位之间进行移动;视觉检测系统包括机架、视觉测量装置和遮光装置,机架用于安装视觉测量装置和遮光装置,视觉测量装置用于主动轮盘的外形扫描,以及检测主动轮盘的齿形,遮光装置用于遮挡环境光对视觉测量装置的影响;下料料仓设置在下料工位,用于放置检测后的主动轮盘。
9.进一步地,上料料仓的框架上设置有定位气缸和定位块,定位块在定位气缸的作用下对放置在框架上的主动轮盘进行定位。
10.进一步地,搬运机器人系统包括搬运机器人和夹爪,夹爪通过法兰与搬运机器人的第六轴连接。
11.进一步地,下料工位设置不少于两个下料料仓,分别放置检验合格的主动轮盘和不合格的主动轮盘。
12.进一步地,机架包括底座、立柱、横梁和镜头调节座;其中,底座固定安装于地面,立柱相对于底座垂直安装;镜头调节座设置于立柱中部偏上位置,横梁设置于立柱顶端。
13.进一步地,视觉测量装置包括远心镜头、工业相机、镜头支架、螺钉、光杆滑块、光杆和背光源;其中,镜头支架设置在镜头调节座上,远心镜头安装在镜头支架上;工业相机固定在远心镜头像方侧;光杆滑块安装在镜头支架上,镜头支架通过光杆滑块与镜头调节座上的光杆连接;螺钉设置于镜头支架上,用于镜头支架与镜头调节座的固定;背光源设置在远心镜头物方侧的延长线上,远心镜头和背光源中间区域为齿形测量区域,远心镜头和背光源之间的距离通过与光杆连接的镜头支架进行调节,并使用螺钉锁死。
14.进一步地,遮光装置包括遮光幕布、气缸、导轨滑块、幕布支架和导轨;其中,气缸和导轨竖直安装于横梁上;幕布支架包括竖杆以及围绕竖杆设置且与竖杆固定连接的幕布支撑杆,竖杆的一侧固定在气缸的气缸杆上,另一侧通过导轨滑块与导轨连接;遮光幕布设置在幕布支架上,通过幕布支撑杆支撑,遮光幕布笼罩在视觉检测系统外侧。
15.(三)有益效果
16.本发明提出一种基于机器视觉的装甲车辆主动轮盘齿形测量装置,包括上料料仓、搬运机器人系统、视觉检测系统和下料料仓。上料料仓用于对主动轮盘进行定位;搬运机器人系统用于将主动轮盘在上料工位、测量工位和下料工位之间进行移动;视觉检测系统包括机架、视觉测量装置和遮光装置,机架用于安装视觉测量装置和遮光装置,视觉测量装置用于主动轮盘的外形扫描,以及检测主动轮盘的齿形,遮光装置用于遮挡环境光对视觉测量装置的影响;下料料仓设置在下料工位,用于放置检测后的主动轮盘。
17.本发明的有益效果具体包括:
18.1.实现特种车辆主动轮盘齿形数据的自动测量,能够有效减小特种车辆主动轮盘的齿形检验工作量。工人只需将特种车辆主动轮盘装夹到上料料仓,搬运机器人就会完成特种车辆主动轮盘的自动上料、变位测量和自动下料,实现特种车辆主动轮盘全自动质量数据采集。整个检测过程不受人为因素影响,有效保证产品检测质量的准确性。
19.2.利用计算机存储零件质量信息,实现零件数字化测量,为后期统计过程控制和数字化加工做准备。工业相机可以将采集到的齿形数据存储在计算机内,计算机提取齿形质量信息为特种车辆主动轮盘制造环节提供反馈信息。
20.3.兼顾测量精度和视野范围,采用搬运机器人配合视觉测量装置完成特种车辆主动轮盘变位测量,在测量过程中,特种车辆主动轮盘先变位后测量逐一完成所有齿形的外形轮廓测量,兼顾测量精度和视野范围,能够有效减小视觉检测系统的制造成本和设计难度。
附图说明
21.图1为特种车辆主动轮盘示意图;
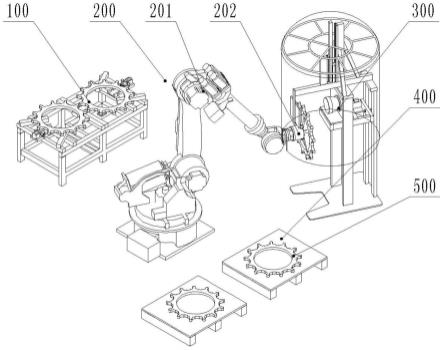
22.图2为本发明实施例的主动轮盘齿形测量装置整体结构示意图;
23.图3为本发明实施例中视觉测量系统示意图。
24.图中,100-上料料仓,200-搬运机器人系统,201-搬运机器人,202-夹爪,300-视觉检测系统,301-底座,302-立柱,303-遮光幕布,304-气缸,305-导轨滑块,306-幕布支架,307-导轨,308-横梁,309-远心镜头,310-工业相机,311-镜头支架,312-螺钉,313-光杆滑块,314-光杆,315-镜头调节座,316-背光源,400-下料料仓,500-特种车辆主动轮盘。
具体实施方式
25.为使本发明的目的、内容和优点更加清楚,下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
26.本实施例提出一种基于机器视觉的装甲车辆主动轮盘齿形测量装置,其结构如图2所示,主要包括上料料仓100、搬运机器人系统200、视觉检测系统300和下料料仓400。
27.上料料仓100的框架上设置有定位气缸和定位块,定位块在定位气缸的作用下对放置在框架上的主动轮盘500进行定位。搬运机器人系统200主要包括搬运机器人201和夹爪202,夹爪202通过法兰与搬运机器人201的第六轴连接,用于将主动轮盘500由上料工位移至测量工位,以及将主动轮盘500由测量工位移至下料工位。
28.视觉检测系统300主要包括机架、视觉测量装置和遮光装置。机架用于安装视觉测量装置和遮光装置,视觉测量装置用于主动轮盘500的外形扫描,以及检测主动轮盘500的齿形。遮光装置用于遮挡环境光对视觉测量装置的影响。下料工位设置不少于两个下料料仓400,分别放置检验合格的主动轮盘500和不合格的主动轮盘500。
29.如图3所示,机架主要包括底座301、立柱302、横梁308和镜头调节座315。其中,底座301固定安装于地面,不少于两根立柱302相对于底座301垂直安装。镜头调节座315设置于立柱302中部偏上位置,横梁308设置于立柱302顶端。
30.视觉测量装置主要包括远心镜头309、工业相机310、镜头支架311、螺钉312、光杆滑块313、光杆314和背光源316。其中,镜头支架311设置在镜头调节座315上,远心镜头309安装在镜头支架311上。工业相机310固定在远心镜头309像方侧。光杆滑块313安装在镜头支架311上,镜头支架311通过光杆滑块313与镜头调节座315上的光杆314连接。螺钉312设置于镜头支架311上,用于镜头支架311与镜头调节座315的固定。背光源316设置在远心镜头309物方侧的延长线上,远心镜头309和背光源316中间区域为齿形测量区域,远心镜头309和背光源316之间的距离通过与光杆314连接的镜头支架311进行调节,然后再用螺钉312锁死。
31.遮光装置主要包括遮光幕布303、气缸304、导轨滑块305、幕布支架306和导轨307。其中,气缸304和导轨307竖直安装于横梁308上。幕布支架306包括竖杆以及围绕竖杆设置且与竖杆固定连接的幕布支撑杆,竖杆的一侧固定在气缸304的气缸杆上,另一侧通过导轨滑块305与导轨307连接。遮光幕布303设置在幕布支架306上,通过幕布支撑杆支撑,遮光幕布303笼罩在视觉检测系统300外侧。
32.上述装甲车辆主动轮盘齿形测量装置的工作过程为:
33.1.在设备运行之前,工人先把主动轮盘500放置到上料料仓100上;上料料仓100上的气缸和定位块完成主动轮盘500的定位;工人调节镜头支架311,将远心镜头309和背光源316的距离调节至适当尺寸,并拧紧螺钉312将镜头支架311锁死;工人按下设备运行按钮,
整套设备进入自动运行状态。
34.2.搬运机器人201末端变位至上料工位,夹爪202完成主动轮盘500装夹;搬运机器人201将主动轮盘500搬运至视觉检测工位。
35.3.气缸304气缸杆推出,遮光幕布303上升;搬运机器人201将主动轮盘500变位至远心镜头309和背光源316之间,主动轮盘500与相机镜头309保持平行;气缸304气缸杆缩回,遮光幕布303下降。
36.4.齿形测量过程中,搬运机器人201对主动轮盘500进行变位操作,主动轮盘500每转动一个角度,工业相机310就拍摄一次,记录当前远心镜头309前的齿形轮廓,并处理齿形轮廓信息。
37.5.主动轮盘500所有齿形都拍摄完毕后,气缸304的气缸杆推出,遮光幕布303上升;搬运机器人201依据检测结果将主动轮盘500放置在下料料仓400上,然后开始下一个主动轮盘500的齿形测量。下料工位设置两个下料料仓400,检验合格的零件放置在一个下料料仓400上,检验不合格的零件放置在另一个下料料仓400上。
38.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。