一种通用的雷达tws与tas结合目标指示方法
技术领域
1.本发明属于雷达技术领域,具体涉及一种通用的雷达tws与tas结合目标指示方法,适用于相控阵雷达在复杂工作环境中的目标搜索与跟踪。
背景技术:
2.雷达tws与tas结合目标指示方法是一种通用的相控阵雷达波束调度与目标跟踪处理方法。
3.目前,相控阵雷达主要采用tws(track while scan,边扫描边跟踪)和tas(track and search,搜索加跟踪)两种工作模式来实现对目标的扫描和跟踪。其中,tws继承机械扫描方式的固定扫描周期,将一个扫描周期内的所有观测数据进行统一记录并进行相应的数据处理,包括:关联、滤波、预测等。该模式为相控阵雷达提供了一种多目标检测手段,但受更新周期的限制,目标的跟踪精度较低,其对于大机动目标容易造成断航。tas在tws的基础上,利用相控阵天线波束扫描的灵活性,在搜索波束的时序间穿插跟踪波束。搜索波束和跟踪波束以不同的更新周期交替工作。该模式充分发挥相控阵天线波束捷变的优势,实现灵活的相控阵雷达波束调度,但搜索和跟踪的穿插策略将耗费更多的雷达计算资源,且需要跟踪的目标越多调度和处理的复杂度越大。
4.用于火控的相控阵雷达首先需要在战场环境中搜索到目标,然后根据目标特性和威胁等级对重点目标进行跟踪,并在跟踪的过程中逐步提高对目标的跟踪精度,最终实现对重点目标实现高稳高精度跟踪以指引武器系统。这就使得相控雷达需要兼顾搜索和跟踪两方面的特性。通过tws和tas结合的目标指示方法,能有效实现雷达对搜索和跟踪两方面需求的兼顾,并控制系统调度的复杂度,提高系统的实时性能。
技术实现要素:
5.要解决的技术问题
6.用于火控的相控阵雷达需要兼顾搜索的全面性和跟踪的稳定性。而tws虽然能实现对探测区域的稳定覆盖,但对强机动目标容易造成跟踪精度降低和目标丢失;tas通过在扫描波束中穿插跟踪波速虽然能提高对机动目标的跟踪精度和跟踪稳定性,但当存在大量跟踪目标时,波束调度将变得过于复杂从而加大系统实时处理的压力。
7.为使相控阵雷达兼顾搜索的全面性和跟踪的稳定性,本发明提供一种通用的雷达tws与tas结合目标指示方法。
8.技术方案
9.一种通用的雷达tws与tas结合目标指示方法,其特征在于包括波束调度策略和目标跟踪算法两个方面,步骤如下:
10.步骤1:将雷达tws更新周期tf划分为t
tws
和t
tas
时隙段,其中t
tws
用于tws的扫描,t
tas
用于tas波束跟踪;t
tws
和t
tas
时隙彼此交替出现,t
tws
在前t
tas
在后;
11.tf=t
tws
t
tas
12.r
w_a
=t
tws
/t
tas
;
13.步骤2:在t
tws
时隙内对雷达探测区域进行扫描,在探测区域内根据探测目标特性选择n个目标进行t
tas
跟踪;其中n≤n,n为系统精确跟踪最大目标数;
14.步骤3:对于t
tas
跟踪的n个目标根据卡尔曼滤波状态估计误差的协方差矩阵来确定每个目标跟踪误差判断值εn,并依此确定需要在t
tas
时隙内添加的跟踪波束个数nm;在tf时段内等间隔的穿插机动目标跟踪波束指向预测目标出现的空域,所穿插波束占用原tas时隙的空闲时隙,而tws时隙长度保持不变,因此r
w_a
维持不变;
15.步骤4:重复步骤2~步骤3,根据目标运动和雷达跟踪状态更新t
tas
跟踪目标个数n,各跟踪目标的跟踪波束个数nm,对机动目标进行灵活波束调度跟踪。
16.本发明进一步的技术方案:步骤3所述的卡尔曼滤波状态估计误差的协方差矩阵具体如下:
17.①
计算状态预测向量
18.x
k/k-1
=φ
k/k-1
x
k-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.2)
19.其中,φ
k/k-1
为一步状态转移矩阵,x
k-1
为目标前次状态;
20.②
计算状态预测误差的协方差矩阵
21.p
k/k-1
=φ
k/k-1
p
k-1
φ
k/k-1t
q
k-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.3)
22.其中,p
k-1
为前次状态误差协方差矩阵,q
k-1
为过程噪声协方差矩阵;
23.③
计算卡尔曼增益矩阵
24.kk=p
k/k-1hkt
(hkp
k/k-1hkt
rk)-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.4)
25.其中,hk为观测矩阵,rk为测量噪声协方差矩阵;
26.④
计算状态估计误差协方差矩阵
27.pk=(i-k
khk
)p
k/k-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.4)
28.其中,i为单位矩阵;
29.⑤
计算目标跟踪误差判断值
30.ek=vp
kvt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.5)
31.其中,v为误差提取权重向量,根据ek的取值可以判断目标突发机动的剧烈程度,从而在tas时隙设计针对机动目标的跟踪波束,并将tas时隙穿插到tws时隙中从而缩短机动目标的探测周期。
32.本发明进一步的技术方案:步骤3中根据卡尔曼滤波状态估计误差的协方差矩阵来确定目标跟踪误差判断值具体为:协方差矩阵的二范数为目标跟踪误差判断值δm。
33.本发明进一步的技术方案:步骤3中并依此确定需要在t
tas
时隙内添加的跟踪波束个数nm波束指向位置n
p
具体为:设置m个误差判断等级门限δm,若第n个跟踪目标的跟踪误差判断值εn》δm,则对第n个目标添加m个跟踪波束;则共需要在ttas时隙内添加nm个跟踪波束,nm为所有ttas跟踪目标添加的跟踪波束的总数。
34.本发明进一步的技术方案:一种计算机系统,其特征在于包括:一个或多个处理器,计算机可读存储介质,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现上述的方法。
35.本发明进一步的技术方案:一种计算机可读存储介质,其特征在于存储有计算机可执行指令,所述指令在被执行时用于实现上述的方法。
36.有益效果
37.本发明提供的一种通用的雷达tws与tas结合目标指示方法,通过tws与tas在时域与空域的有机结合,可实现相控阵雷达在复杂搜索环境中对强机动目标的有效跟踪。通过tws和tas结合的目标指示方法,能有效实现雷达对搜索和跟踪两方面需求的兼顾,并控制系统调度的复杂度,提高系统的实时性能。
附图说明
38.附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
39.图1为初始搜索状态下t
tws
和t
tas
的时隙划分关系。
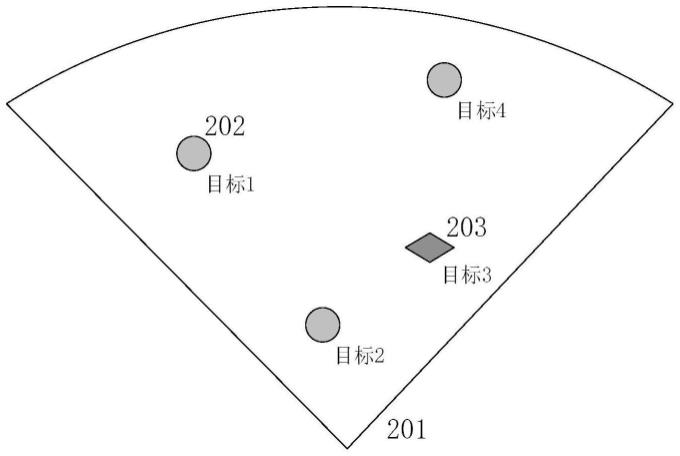
40.图2为k时刻,tws与tas跟踪目标分布。
41.图3为k时刻,ttws和ttas的时隙分布关系。
42.图4为k'时刻,tws与tas跟踪目标分布。
43.图5为k'时刻,ttws和ttas的时隙分布关系。
具体实施方式
44.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
45.本发明为相控阵雷达的tws和tas复合设计,包括波束调度策略和目标跟踪算法两个方面,包含如下步骤:
46.(1)依据雷达使用场景设定雷达tws更新周期tf,并将tf划分为t
tws
和t
tas
时隙段,其中t
tws
用于tws的扫描,t
tas
用于tas波束跟踪;t
tws
和t
tas
时隙彼此交替出现,t
tws
在前t
tas
在后;
47.(2)在t
tws
时隙内对雷达探测区域进行扫描,在探测区域内根据探测目标特性选择n个目标(n≤n,n为系统精确跟踪最大目标数)进行t
tas
跟踪;n个目标为出现在重点观测区全内或目标识别属性为重点观测对象的目标;
48.(3)对于t
tas
跟踪的n个目标根据卡尔曼滤波状态估计误差的协方差矩阵来确定每个目标跟踪误差判断值εn(如取协方差矩阵的二范数为目标跟踪误差判断值εn),并依此确定需要在t
tas
时隙内添加的跟踪波束个数nm。设置m个误差判断等级门限δm,若第n个跟踪目标的跟踪误差判断值εn》δm,则对第n个目标添加m个跟踪波束。则共需要在ttas时隙内添加nm个跟踪波束(nm为所有t
tas
跟踪目标添加的跟踪波束的总数);
49.(4)重复步骤(2)~(3),根据目标运动和雷达跟踪状态更新t
tas
跟踪目标个数n,各跟踪目标的跟踪波束个数nm。
50.下面分别对各步骤进行具体描述:
51.步骤(1)
52.根据雷达扫描周期要求确定tf,并将tf划分为t
tws
和t
tas
。
53.tf=t
tws
t
tas
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.1)
54.式1.1中,t
tws
为twa扫描时隙长度,t
tas
为tas扫描时隙长度,两者的比例关系为r
w_a
=t
tws
/t
tas
。
55.图1中给出了初始搜索状态下tf101,t
tws
102和t
tas
103的时隙划分关系,初始搜索状态下t
tws
为空闲且在t
tas
之后,两者交替重复。
56.步骤(2)
57.雷达在t
tws
时隙内重复扫描探测区域,对于过门限目标进行固定扫描间隔的目标跟踪及航迹滤波。根据目标特性选择其中n个目标进行tas跟踪,n≤n,n为系统指定的最大tas跟踪目标个数。
58.步骤(3)
59.对n个tas跟踪目标,求取卡尔曼滤波状态估计误差的协方差矩阵pk。具体步骤如下:
60.①
计算状态预测向量
61.x
k/k-1
=φ
k/k-1
x
k-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.2)
62.其中,φ
k/k-1
为一步状态转移矩阵,x
k-1
为目标前次状态。
63.②
计算状态预测误差的协方差矩阵
64.p
k/k-1
=φ
k/k-1
p
k-1
φ
k/k-1t
q
k-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.3)
65.其中,p
k-1
为前次状态误差协方差矩阵,q
k-1
为过程噪声协方差矩阵。
66.③
计算卡尔曼增益矩阵
67.kk=p
k/k-1hkt
(hkp
k/k-1hkt
rk)-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.4)
68.其中,hk为观测矩阵,rk为测量噪声协方差矩阵。
69.④
计算状态估计误差协方差矩阵
70.pk=(i-k
khk
)p
k/k-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.4)
71.其中,i为单位矩阵。
72.⑤
计算目标跟踪误差判断值
73.ek=vp
kvt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.5)
74.其中,v为误差提取权重向量。根据ek的取值可以判断目标突发机动的剧烈程度,从而在tas时隙设计针对机动目标的跟踪波束,并将tas时隙穿插到tws时隙中从而缩短机动目标的探测周期。在tf时段内等间隔的穿插机动目标跟踪波束指向预测目标出现的空域,所穿插波束占用原tas时隙的空闲时隙,而tws时隙长度保持不变,因此r
w_a
维持不变。通过tas跟踪波束的加入可动态的缩短对机动目标的跟踪周期,从而减小跟踪误差,而普通目标则保持既定的扫描周期。
75.步骤(4)
76.重复步骤(2)~(3),根据当前时刻t
tws
和t
tas
的融合探测结果确定需要tas跟踪的目标个数n,各tas跟踪目标的tas跟踪波束个数nm。这里需满足:
[0077][0078]
其中,tz为跟踪波束驻留时间,nk为当前时刻需要进行tas跟踪的目标总数,nm为第n个tas跟踪目标需要的tas驻留波束个数。
[0079]
为了使本领域技术人员更好地理解本发明,下面结合具体实施例对本发明进行详细说明。
[0080]
某应用背景下,系统需求的雷达搜索数据更新周期为tf=2s,将该周期划分为t
tws
=1.6s,t
tas
=0.4s,则r
w_a
=4。
[0081]
雷达在t
tws
时隙内重复扫描探测区域,在k时刻,在t
tws
时隙检测并跟踪到4个目标,根据目标特性选择目标3进行tas跟踪,其目标分布图如图2所示,在雷达搜索区域201内将目标1、目标2、目标4划分为tws跟踪目标202,将目标3划分为tas跟踪目标203。
[0082]
此时刻,计算出的目标3跟踪误差判断值e
k_3
=3(目标3卡尔曼滤波协方差矩阵的二范数为e
k_3
,而e
k_3
》预设门限ε3,t
tas
时隙内添加的跟踪波束个数nm为3),如图3所示将tf进行重新划分,将更新周期t
f 301划分为tws时隙302和tas时隙303。其中303又被划分为用于目标3的跟踪时刻304及空闲时刻t
tas0
305,其中304包括t
3_0
、t
3_1
、t
3_2
。此时tws和tas的时隙周期进行了重新划分,减少了tas的空闲时隙增加了对目标3的跟踪波束时隙,但r
w_a
=4维持不变。
[0083]
在k'时刻,在t
tws
时隙检测并跟踪到6个目标,根据目标特性选择目标3和目标5进行tas跟踪,其目标分布图如图4所示,在雷达搜索区域401内将目标1、目标2、目标4、目标6划分为tws跟踪目标402,将目标3和目标5划分为tas跟踪目标403。
[0084]
此时刻,计算出的目标3跟踪误差判断值e
k_3
=2,目标5跟踪误差判断值e
k_5
=2(目标3卡尔曼滤波协方差矩阵的二范数为e
k_3
,而ε3》e
k_3
》ε2;同样计算出目标5的而ε3》e
k_5
》ε2,t
tas
时隙内添加的跟踪波束个数nm为4),如图5所示将tf进行重新划分,将更新周期t
f 501划分为tws时隙502和tas时隙503,其中503又被划分为包含用于目标3的跟踪时刻504,用于目标5的跟踪时刻505,及空闲时刻t
tas0
506。其中504包括t
3_0
、t
3_1
,505包括t
5_0
、t
5_1
。此时tws和tas的时隙周期进行了重新划分,但r
w_a
=4维持不变。
[0085]
重复上述步骤,tws和tas的时隙会根据当前跟踪目标状态进行变更,但r
w_a
=4维持不变,因此tws的搜索周期不变。雷达搜索策略得以稳定维持,且能对机动目标进行灵活波束调度跟踪。
[0086]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。