1.本发明属于钻孔设备领域,具体涉及一种微型桩成孔钻机。
背景技术:
2.微型桩是经过钻孔、加入强配筋、压力注浆等施工工艺制成的灌注桩,其具有承载能力高、沉降量小等优点,广泛运用在多领域桩基建设中。
3.目前,一般采用微型桩成孔钻机施工微型桩的桩孔。现有的微型桩成孔钻机多采用单一直径钻头进行钻孔,但由于钻头与岩壁的摩擦力会形成轴向阻力,易导致单一直径钻头在井下工作时抗拔能力较差;而通过更换不同直径钻头来提高钻头的抗拔能力,又会增加时间成本,降低钻孔效率。
4.为此人们研发了可变径型钻机,采用杆件滑块、导轨滑块、螺旋传动等变径结构,并外加液压、气压或电机动力等作为变径动力。例如:授权公告号为cn211950316u的中国实用新型专利,就公开了一种数字化可变径旋挖钻机,其伸缩式钻杆的伸缩臂末端安装有动力头,动力头输出端安装可变径数字化钻具,伸缩式钻杆的固定臂上安装有电缆卷盘、深度检测传感器和软管卷盘,可变径数字化钻具内安装有进尺检测传感器和液压阀,下部安装有桶型钻具。
5.虽然上述的可变径型钻机采用液压、气压或电机动力等作为变径动力,以改变钻头直径,能有效消除传统的微型桩成孔钻机需配备多种孔径钻具和人工更换钻具的缺陷,但是其还需要利用液压、气压或电机动力等作为自锁动力,确保变径后的钻具实现自锁,这会大大增加设备钻孔的能耗,不适于在山地、高原等电力资源缺乏的地区使用。
6.同时,虽然现有微型桩成孔钻机能够实现对井底的平稳钻削,达到相应尺寸要求;但缺少对井下钻孔质量评价、钻头使用寿命预测等方面功能,严重影响工作人员精准司钻和成孔效率。
技术实现要素:
7.本发明提供了一种微型桩成孔钻机,旨在解决现有的可变径型钻机能耗较大的问题。
8.本发明解决其技术问题所采用的技术方案是:微型桩成孔钻机,包括钻杆总成,钻杆总成包括钻杆主体,钻杆主体上活动设置有径向钻头,钻杆主体内设置有与径向钻头传动连接的变径机构,变径机构能够驱使径向钻头从钻杆主体的侧壁伸出和缩入;
9.钻杆主体内设有转轴腔,转轴腔中设置有转轴组件,转轴组件包括可转动地设置在转轴腔中的内转轴;
10.钻杆主体内设置有能够驱使内转轴转动的转轴驱动机构;
11.钻杆主体内还设有自锁腔,自锁腔中设置有钻头自锁机构,钻头自锁机构包括与内转轴传动连接的导向轴,导向轴上螺纹连接有螺母卡件;
12.螺母卡件的上侧设置有第一防转组件,第一防转组件固定设置在自锁腔中并与导
向轴转动配合,且第一防转组件能够与螺母卡件配合连接并传递转矩;
13.螺母卡件的下侧设置有第二防转组件,第二防转组件固定设置在自锁腔中并与导向轴转动配合,且第二防转组件能够与螺母卡件配合连接并传递转矩;
14.第一防转组件和/或第二防转组件上设置有轴向导杆,轴向导杆与螺母卡件滑动配合;
15.变径机构为旋转驱动式机构,其与内转轴和/或导向轴传动连接;
16.当内转轴正转时,变径机构驱使径向钻头从缩入状态变为伸出状态,在螺纹的作用下螺母卡件沿导向轴的轴向运动,从与第一防转组件配合连接的状态变为与第二防转组件配合连接的状态,或是从与第二防转组件配合连接的状态变为与第一防转组件配合连接的状态;
17.当内转轴反转时,变径机构驱使径向钻头从伸出状态变为缩入状态,在螺纹的作用下螺母卡件沿导向轴的轴向运动,从与第二防转组件配合连接的状态变为与第一防转组件配合连接的状态,或是从与第一防转组件配合连接的状态变为与第二防转组件配合连接的状态。
18.进一步的,第一防转组件包括与导向轴转动配合的第一棘轮,以及固定设置在自锁腔的内壁上并与第一棘轮相配合的第一棘爪;第一棘轮的下部设有能够与螺母卡件配合连接的第一卡件槽;
19.第二防转组件包括与导向轴转动配合的第二棘轮,以及固定设置在自锁腔的内壁上并与第二棘轮相配合的第二棘爪;第二棘轮的上部设有能够与螺母卡件配合连接的第二卡件槽;
20.第一棘轮与第二棘轮可转动的方向相反,轴向导杆设置在第一棘轮和/或第二棘轮上。
21.进一步的,该微型桩成孔钻机还包括电源;
22.钻杆主体内还设有泥浆腔,泥浆腔处于转轴腔的上侧;
23.转轴组件还包括外转轴;外转轴套设在内转轴外,并可转动地设置在转轴腔中,且外转轴的外壁面与转轴腔的内壁面之间形成有泥浆通道第二段,泥浆通道第二段的上端通过泥浆通道第三段与泥浆腔连通;
24.转轴驱动机构包括绕设在内转轴上的线圈,以及设置在外转轴上的永磁体;
25.线圈通过线圈电控器与电源电性连接,线圈电控器包括主开关和电极切换开关;
26.永磁体沿外转轴的周向分布,并与线圈相对应;
27.外转轴上还设置有螺旋叶片,螺旋叶片处于泥浆通道第二段中;
28.自锁腔位于转轴腔的下侧,自锁腔的侧壁内设有泥浆通道第一段,泥浆通道第一段的下端处于钻杆主体的底端面上,泥浆通道第一段的上端与泥浆通道第二段的下端连通。
29.进一步的,钻杆主体包括由下往上依次螺纹连接在一起的钻杆第一段、钻杆第二段、钻杆第三段、钻杆第四段和钻杆第五段;
30.径向钻头设置在钻杆第一段上,自锁腔设在钻杆第一段内,转轴腔设在钻杆第二段内,泥浆通道第三段设在钻杆第三段内,泥浆腔设在钻杆第四段和钻杆第五段内。
31.进一步的,变径机构为机械虹膜机构,其包括导向座和驱动板;
32.导向座设置在钻杆主体内,其上设有与径向钻头一一对应的径向导向槽,径向导向槽沿钻杆主体的径向设置;
33.驱动板可转动地设置在钻杆主体内,并与导向轴传动连接;驱动板上设有与径向钻头一一对应的弧形导向槽,弧形导向槽的内端比其外端更靠近钻杆主体的轴心线;
34.径向钻头上设置有伸入径向导向槽中的径向导杆,以及伸入弧形导向槽中的驱动导杆;
35.当内转轴正转时,会带动导向轴和驱动板一起正转,使得弧形导向槽的内侧壁朝外挤压驱动导杆以带动径向钻头朝外运动,同时径向导向槽对径向导杆进行导向使得径向钻头沿钻杆主体的径向伸出,待径向导杆由径向导向槽的内端运动至径向导向槽的外端后,即使得径向钻头从缩入状态变为伸出状态;
36.当内转轴反转时,会带动导向轴和驱动板一起反转,使得弧形导向槽的外侧壁朝内挤压驱动导杆以带动径向钻头朝内运动,同时径向导向槽对径向导杆进行导向使得径向钻头沿钻杆主体的径向缩入,待径向导杆由径向导向槽的外端运动至径向导向槽的内端后,即使得径向钻头从伸出状态变为缩入状态。
37.进一步的,驱动板设置在自锁腔中,并位于径向钻头的上侧,且与导向轴的下端传动连接;
38.导向座处于径向钻头的下侧。
39.进一步的,该微型桩成孔钻机还包括监测系统、信号处理设备和控制设备;
40.监测系统包括转速传感器、扭矩传感器、温度传感器和超声波传感器,转速传感器、扭矩传感器、温度传感器和超声波传感器均设置在钻杆主体内并分别与信号处理设备通讯连接,线圈电控器和信号处理设备分别与控制设备通讯连接。
41.进一步的,监测系统还包括过流控制机构,过流控制机构包括第一转子、第二转子和转子驱动电机;
42.第一转子设置在外转轴上,其与转轴腔的内壁面之间形成有第一过流间隙;
43.第二转子可转动地设置在转轴腔的侧壁上,且第二转子上设置有挡流板,挡流板将第一过流间隙部分遮挡住;
44.转子驱动电机设置在钻杆主体内,并与第二转子传动连接,且与控制设备通讯连接。
45.进一步的,转轴腔的侧壁内设有呈环形的电器腔;
46.转速传感器、扭矩传感器、温度传感器、超声波传感器和转子驱动电机均设置在电器腔中;
47.第二转子的边沿设有外齿环,外齿环伸入电器腔中;
48.转子驱动电机至少为两个,并沿第二转子的周向均匀分布;
49.转子驱动电机的输出端上设置有主动齿轮,主动齿轮与外齿环相啮合。
50.进一步的,该微型桩成孔钻机还包括机架、钻杆升降机构和角度调控机构;
51.机架底部设置有履带式运输机构;
52.钻杆升降机构包括桅杆和升降组件;桅杆设置在机架上,其下端与机架铰接;升降组件设置在桅杆上,其升降驱动部与钻杆总成配合连接;
53.角度调控机构包括伸缩件;伸缩件倾斜设置,其上端与桅杆铰接,其下端与机架铰
接。
54.本发明的有益效果是:
55.(1)该微型桩成孔钻机的变径机构为旋转驱动式机构,通过控制内转轴的正反转即可驱动变径机构对径向钻头的伸缩状态进行切换,进而实现钻头的变径;同时,通过在自锁腔中设置主要由导向轴、螺母卡件、第一防转组件和第二防转组件构成的自锁机构,能够在导向轴随内转轴正反转时,使螺母卡件在螺纹的作用下沿导向轴的轴向运动,进而在径向钻头处于缩入极限位置或伸出极限位置时,使螺母卡件与第一防转组件或第二防转组件配合连接并传递转矩,从而实现钻头在最大或最小直径下形成自锁,实现不同岩层下稳定切削,并提高钻头的抗拔能力,而且无需更换钻头,不会增加人力成本;另外,上述自锁机构为纯机械式结构,无需外加液压、气压或电机动力等额外的自锁动力,降低了钻机的能耗,适于在山地、高原等电力资源缺乏的地区使用。
56.(2)通过主要由内转轴和带螺旋叶片的外转轴组成的转轴组件,以及主要由线圈和永磁体组成的转轴驱动机构,能够利用经过泥浆通道第二段的泥浆冲击螺旋叶片,以带动外转轴和永磁体旋转,同时通过线圈电控器使线圈与电源形成通电回路,即可使内转轴成为电磁体并利用旋转永磁体对电磁体产生周期性力的作用,实现内转轴的旋转,从而为变径机构提供变径动力;而且,通过线圈电控器能够对线圈接电的正负极进行切换,实现内转轴的正反转切换控制,利于实现地面上远程操控井下钻头直径的改变;另外,由于转轴驱动机构利用了泥浆动力使得永磁体旋转,因此相较于现有的可变径型钻机,降低了钻头变径过程中的能耗。
57.(3)通过设置主要由转速传感器、扭矩传感器、温度传感器和超声波传感器组成的监测系统,能够测量井下转速、扭矩、温度、深度、垂直度等参数,使得地面上获得井下钻头的状态参数和成孔质量参数,实现随钻测量,便于井上施工人员根据测量数据司钻、按时更换钻头,利于提高钻孔效率和质量。
58.(4)该微型桩成孔钻机可采用泥浆脉冲方式进行信号传输,并通过主要由第一转子、第二转子和转子驱动电机组成的过流控制机构,能够在传输信号稳定时,使第一转子随外转轴转动,第二转子在转子驱动电机的驱动作用下带动挡流板旋转并保持与第一转子恒定过流面积;当传输信号出现波动时,在控制设备的控制作用下转子驱动电机改变对第二转子的驱动转速,进而改变遮挡第一过流间隙的程度以改变过流面积,从而产生泥浆压力脉动,最后通过信号处理设备能够对检测到的压力变化进行信号处理,获得相应的变化曲线,以利于调整钻孔参数。
59.(5)通过设置带履带式运输机构的机架,利于使得该微型桩成孔钻机适应山地、高原等复杂地形;通过将钻杆主体设置为主要由钻杆第一段、钻杆第二段、钻杆第三段、钻杆第四段和钻杆第五段组成的结构,便于钻机拆卸和运输。
附图说明
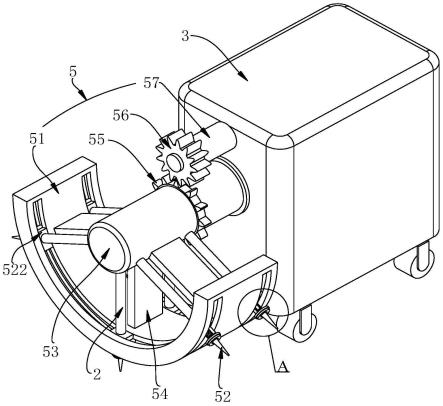
60.图1是本发明的实施结构示意图;
61.图2是图1中p处的局部放大图;
62.图3是沿图2中a-a线的剖视图;
63.图4是沿图2中b-b线的剖视图;
64.图5是第一防转组件的俯视图;
65.图6是第二防转组件的俯视图;
66.图中标记为:钻杆总成1、钻杆主体11、径向钻头111、径向导杆1111、驱动导杆1112、转轴腔112、泥浆通道第二段1121、电器腔1122、转轴组件113、内转轴1131、外转轴1132、螺旋叶片1133、自锁腔114、泥浆通道第一段1141、轴向导杆1142、钻头自锁机构115、导向轴1151、螺母卡件1152、联轴器1153、第一棘轮1154、第一卡件槽1155、第一棘爪1156、第二棘轮1157、第二卡件槽1158、第二棘爪1159、泥浆腔116、泥浆通道第三段1161、转轴驱动机构117、线圈1171、永磁体1172、钻杆第一段1181、钻杆第二段1182、钻杆第三段1183、钻杆第四段1184、钻杆第五段1185、扶正器119、导向座121、径向导向槽1211、驱动板122、弧形导向槽1221、电源2、电源模块21、转速传感器31、扭矩传感器32、温度传感器33、超声波传感器34、过流控制机构35、第一转子351、第二转子352、挡流板3521、外齿环3522、转子驱动电机353、主动齿轮3531、信号处理设备4、信号处理单元41、机架5、履带式运输机构51、钻杆升降机构6、桅杆61、升降组件62、升降驱动部621、伸缩件71、控制单元81。
具体实施方式
67.下面结合附图对本发明作进一步说明。
68.在本发明的描述中,需要说明的是,术语“内”、“外”、“底”、“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述,而不是指示或暗示所指的装置或部件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制;术语“多个”指两个或两个以上;“主要由
……
组成或构成”的表达方式,其解释为还可以含有该句中没有述及的结构组成部分;“和/或”仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如:a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
69.结合图1和图2所示,微型桩成孔钻机,包括钻杆总成1,钻杆总成1包括钻杆主体11,钻杆主体11上活动设置有径向钻头111;通常径向钻头111至少为两个,并沿钻杆主体11的周向均匀分布;例如:图4实施方式中,径向钻头111为均布的六个;
70.钻杆主体11内设置有与径向钻头111传动连接的变径机构,变径机构能够驱使径向钻头111从钻杆主体11的侧壁伸出和缩入;
71.钻杆主体11内设有转轴腔112,转轴腔112中设置有转轴组件113,转轴组件113包括可转动地设置在转轴腔112中的内转轴1131;
72.钻杆主体11内设置有能够驱使内转轴1131转动的转轴驱动机构117;
73.钻杆主体11内还设有自锁腔114,自锁腔114中设置有钻头自锁机构115,钻头自锁机构115包括与内转轴1131传动连接的导向轴1151,导向轴1151上螺纹连接有螺母卡件1152;
74.螺母卡件1152的上侧设置有第一防转组件,第一防转组件固定设置在自锁腔114中并与导向轴1151转动配合,且第一防转组件能够与螺母卡件1152配合连接并传递转矩;
75.螺母卡件1152的下侧设置有第二防转组件,第二防转组件固定设置在自锁腔114中并与导向轴1151转动配合,且第二防转组件能够与螺母卡件1152配合连接并传递转矩;
76.第一防转组件和/或第二防转组件上设置有轴向导杆1142,轴向导杆1142与螺母卡件1152滑动配合;
77.变径机构为旋转驱动式机构,其与内转轴1131和/或导向轴1151传动连接;变径机构可以为多种,例如:螺旋传动式变径机构、齿轮齿条传动式变径结构、机械虹膜机构等等;
78.当内转轴1131正转时,变径机构驱使径向钻头111从缩入状态变为伸出状态,在螺纹的作用下螺母卡件1152沿导向轴1151的轴向运动,从与第一防转组件配合连接的状态变为与第二防转组件配合连接的状态,或是从与第二防转组件配合连接的状态变为与第一防转组件配合连接的状态;
79.当内转轴1131反转时,变径机构驱使径向钻头111从伸出状态变为缩入状态,在螺纹的作用下螺母卡件1152沿导向轴1151的轴向运动,从与第二防转组件配合连接的状态变为与第一防转组件配合连接的状态,或是从与第一防转组件配合连接的状态变为与第二防转组件配合连接的状态。
80.该微型桩成孔钻机主要用于微型桩成孔,适合运用于钻削直径不超过600mm的桩基孔;特别适合运用于钻削直径600mm、深度10m,且具有复合岩层的桩基孔。
81.该微型桩成孔钻机的变径机构为旋转驱动式机构,通过控制内转轴1131的正反转即可驱动变径机构对径向钻头111的伸缩状态进行切换,进而实现钻头的变径;同时,通过在自锁腔114中设置主要由导向轴1151、螺母卡件1152、第一防转组件和第二防转组件构成的自锁机构115,能够在导向轴1151随内转轴1131正反转时使螺母卡件1152在螺纹的作用下沿导向轴1151的轴向运动,进而在径向钻头111处于缩入极限位置或伸出极限位置时,使螺母卡件1152与第一防转组件或第二防转组件配合连接并传递转矩,从而实现钻头在最大或最小直径下形成自锁,实现不同岩层下稳定切削,并提高钻头的抗拔能力,而且无需更换钻头,不会增加人力成本;另外,上述自锁机构为纯机械式结构,无需外加液压、气压或电机动力等额外的自锁动力,降低了钻机的能耗,适于在山地、高原等电力资源缺乏的地区使用。
82.其中,内转轴1131正转的方向可以为顺时针方向,也可以为逆时针方向;内转轴1131反转的方向与其正转的方向相反。内转轴1131正转时螺母卡件1152的运动方向与内转轴1131反转时螺母卡件1152的运动方向相反。
83.钻头自锁机构115主要用于实现钻头在最大或最小直径下形成自锁;其导向轴1151主要用于旋转并利用螺纹使螺母卡件1152上下运动,以进行自锁;导向轴1151一般通过联轴器1153与内转轴1131传动连接。
84.第一防转组件和第二防转组件主要用于在径向钻头111处于缩入极限位置或伸出极限位置时,防止内转轴1131相对于钻杆主体11继续转动;第一防转组件和第二防转组件可以为多种,例如:挡块、挡板等等。
85.为了保证防转效果并方便装配,结合图2、图5和图6所示,第一防转组件包括与导向轴1151转动配合的第一棘轮1154,以及固定设置在自锁腔114的内壁上并与第一棘轮1154相配合的第一棘爪1156;第一棘轮1154的下部设有能够与螺母卡件1152配合连接的第一卡件槽1155;
86.第二防转组件包括与导向轴1151转动配合的第二棘轮1157,以及固定设置在自锁腔114的内壁上并与第二棘轮1157相配合的第二棘爪1159;第二棘轮1157的上部设有能够
与螺母卡件1152配合连接的第二卡件槽1158;
87.第一棘轮1154与第二棘轮1157可转动的方向相反,轴向导杆1142设置在第一棘轮1154和/或第二棘轮1157上。
88.为棘轮机构的第一防转组件和第二防转组件实现钻头自锁的安装组合方式可以为多种,其中一种方式的自锁过程如下:内转轴1131带动导向轴1151正转,在螺纹传动作用下螺母卡件1152沿导向轴1151向下做直线运动;当螺母卡件1152运动到与第二卡件槽1158配合时,钻头达到最大直径,且在棘轮机构作用下实现自锁,保证钻头切削不同硬度岩层时直径不变;当钻削完毕后需要提升钻头时,内转轴1131带动导向轴1151反转,使得螺母卡件1152向上运动,当螺母卡件1152运动到与第一卡件槽1155配合时,钻头达到最小直径且实现自锁,保证能够快速提钻。由于第一棘轮1154与第二棘轮1157可转动的方向相反,因此可实现变径钻头双向自锁。
89.为了便于螺母卡件1152与第一卡件槽1155或第二卡件槽1158配合,并达到良好的转矩传递效果,且为了保证零部件的结构强度和使用寿命,优选在螺母卡件1152的外壁上设有外花键结构,使第一卡件槽1155和第二卡件槽1158均为具有内花键结构的槽,如图5和图6所示。
90.在上述基础上,为了有效导向螺母卡件1152,通常在内花键结构的每个键槽中均设置穿过外花键结构的键体的轴向导杆1142。
91.转轴驱动机构117主要用于驱使内转轴1131正反转,以提供变径动力;其可以为多种,例如:旋转气缸、电机等等。
92.优选的,再结合图1和图2所示,该微型桩成孔钻机还包括电源2;
93.钻杆主体11内还设有泥浆腔116,泥浆腔116处于转轴腔112的上侧;
94.转轴组件113还包括外转轴1132;外转轴1132套设在内转轴1131外,并可转动地设置在转轴腔112中,且外转轴1132的外壁面与转轴腔112的内壁面之间形成有泥浆通道第二段1121,泥浆通道第二段1121的上端通过泥浆通道第三段1161与泥浆腔116连通;
95.转轴驱动机构包括绕设在内转轴1131上的线圈1171,以及设置在外转轴1132上的永磁体1172;
96.线圈1171通过线圈电控器与电源2电性连接,线圈电控器包括主开关和电极切换开关;
97.永磁体1172沿外转轴1132的周向分布,并与线圈1171相对应;
98.外转轴1132上还设置有螺旋叶片1133,螺旋叶片1133处于泥浆通道第二段1121中;
99.自锁腔114位于转轴腔112的下侧,自锁腔114的侧壁内设有泥浆通道第一段1141,泥浆通道第一段1141的下端处于钻杆主体11的底端面上,泥浆通道第一段1141的上端与泥浆通道第二段1121的下端连通。
100.通过主要由内转轴1131和带螺旋叶片1133的外转轴1132组成的转轴组件113,以及主要由线圈1171和永磁体1172组成的转轴驱动机构117,能够利用经过泥浆通道第二段1121的泥浆冲击螺旋叶片1133,以带动外转轴1132和永磁体1172旋转,同时通过线圈电控器使线圈1171与电源2形成通电回路,即可使内转轴1131成为电磁体并利用旋转永磁体1172对电磁体产生周期性力的作用,实现内转轴1131的旋转,从而为变径机构提供变径动
力;而且,通过线圈电控器能够对线圈1171接电的正负极进行切换,实现内转轴1131的正反转切换控制,利于实现地面上远程操控井下钻头直径的改变;另外,由于转轴驱动机构117利用了泥浆动力使得永磁体1172旋转,因此相较于现有的可变径型钻机,降低了钻头变径过程中的能耗。此外,通过从下往上依次连通的泥浆通道第一段1141、泥浆通道第二段1121、泥浆通道第三段1161和泥浆腔116,能够利用泥浆内循环排渣冷却,实现该微型桩成孔钻机的冷却排屑。
101.为了便于钻机的拆卸和运输,再结合图1和图2所示,钻杆主体11包括由下往上依次螺纹连接在一起的钻杆第一段1181、钻杆第二段1182、钻杆第三段1183、钻杆第四段1184和钻杆第五段1185;
102.径向钻头111设置在钻杆第一段1181上,自锁腔114设在钻杆第一段1181内,转轴腔112设在钻杆第二段1182内,泥浆通道第三段1161设在钻杆第三段1183内,泥浆腔116设在钻杆第四段1184和钻杆第五段1185内。
103.优选的,结合图2和图4所示,变径机构为机械虹膜机构,其包括导向座121和驱动板122;
104.导向座121设置在钻杆主体11内,其上设有与径向钻头111一一对应的径向导向槽1211,径向导向槽1211沿钻杆主体11的径向设置;
105.驱动板122可转动地设置在钻杆主体11内,并与导向轴1151传动连接;驱动板122上设有与径向钻头111一一对应的弧形导向槽1221,弧形导向槽1221的内端比其外端更靠近钻杆主体11的轴心线;
106.径向钻头111上设置有伸入径向导向槽1211中的径向导杆1111,以及伸入弧形导向槽1221中的驱动导杆1112;径向导杆1111和驱动导杆1112可以为分体结构,也可以为一根杆的上下两段;
107.当内转轴1131正转时,会带动导向轴1151和驱动板122一起正转,使得弧形导向槽1221的内侧壁朝外挤压驱动导杆1112以带动径向钻头111朝外运动,同时径向导向槽1211对径向导杆1111进行导向使得径向钻头111沿钻杆主体11的径向伸出,待径向导杆1111由径向导向槽1211的内端运动至径向导向槽1211的外端后,即使得径向钻头111从缩入状态变为伸出状态;
108.当内转轴1131反转时,会带动导向轴1151和驱动板122一起反转,使得弧形导向槽1221的外侧壁朝内挤压驱动导杆1112以带动径向钻头111朝内运动,同时径向导向槽1211对径向导杆1111进行导向使得径向钻头111沿钻杆主体11的径向缩入,待径向导杆1111由径向导向槽1211的外端运动至径向导向槽1211的内端后,即使得径向钻头111从伸出状态变为缩入状态。
109.采用上述机械虹膜机构驱动径向钻头111实现钻头的变径,具有结构紧凑、工作稳定可靠、制作成本低、操作简单、便于拆卸等优点。
110.在上述基础上,为了使得变径机构结构更为紧凑,再如图2所示,将驱动板122设置在自锁腔114中,并位于径向钻头111的上侧,且与导向轴1151的下端传动连接;
111.使导向座121处于径向钻头111的下侧。
112.为了便于提高径向钻头111的变径范围,可在径向钻头111上开设多个沿其长度方向间隔分布的导杆安装孔,将径向导杆1111可拆卸地设置在其中一个导杆安装孔中。
113.为了防止钻杆总成1歪斜,再如图1和图2所示,通常在钻杆主体11上设置有扶正器119。
114.作为本发明的一种优选方案,结合图1、图2和图3所示,该微型桩成孔钻机还包括监测系统、信号处理设备4和控制设备;
115.监测系统包括转速传感器31、扭矩传感器32、温度传感器33和超声波传感器34,转速传感器31、扭矩传感器32、温度传感器33和超声波传感器34均设置在钻杆主体11内并分别与信号处理设备4通讯连接,线圈电控器和信号处理设备4分别与控制设备通讯连接。信号处理设备4一般包括设置在钻杆主体11内的信号处理单元41,该信号处理单元41通常与各传感器电性连接以处理和传输信号。
116.通过设置主要由转速传感器31、扭矩传感器32、温度传感器33和超声波传感器34组成的监测系统,能够测量井下转速、扭矩、温度、深度、垂直度等参数,使得地面上获得井下钻头的状态参数和成孔质量参数,实现随钻测量,便于井上施工人员根据测量数据司钻、按时更换钻头,利于提高钻孔效率和质量。
117.其中,通过转速传感器31和扭矩传感器32的测量信号变化规律能够反映井下钻头振动情况,具体通过转速信号和扭矩信号实现钻头振动情况反映的技术手段为现有技术,此不赘述。通过扭矩传感器32和温度传感器33的测量信号变化规律能够反映钻头磨损情况,具体通过扭矩信号和温度信号实现钻头磨损情况反映的技术手段为现有技术,此不赘述。通过超声波传感器34能够探测获得钻孔直径、深度、垂直度反映成孔质量。另外,钻孔过程中可通过记录钻孔时间并结合获得下钻速反映成孔效率。
118.通讯连接包括有线连接和无线连接;有线连接主要包括电缆、钻杆、光纤传输等等;有线连接的传输速度快且能为井下设备供电,但制造工艺复杂、成本较高;无线连接主要包括电磁、声波、钻井液脉冲传输等等;无线连接的传输成本适中,制造工艺简单,目前钻井液脉冲传输方式运用最为广泛。
119.优选的,结合图2和图3所示,监测系统还包括过流控制机构35,过流控制机构35包括第一转子351、第二转子352和转子驱动电机353;
120.第一转子351设置在外转轴1132上,其与转轴腔112的内壁面之间形成有第一过流间隙;
121.第二转子352可转动地设置在转轴腔112的侧壁上,且第二转子352上设置有挡流板3521,挡流板3521将第一过流间隙部分遮挡住;
122.转子驱动电机353设置在钻杆主体11内,并与第二转子352传动连接,且与控制设备通讯连接。电源2一般包括设置在钻杆主体11内的电源模块21,该电源模块21分别与各传感器和转子驱动电机353电性连接以提供电力。控制设备一般包括设置在钻杆主体11内的控制单元81,该控制单元81与转子驱动电机353电性连接以对其进行控制。
123.该微型桩成孔钻机优选采用泥浆脉冲方式进行信号传输,并通过主要由第一转子351、第二转子352和转子驱动电机353组成的过流控制机构35,能够在传输信号稳定时,使第一转子351随外转轴1132转动,第二转子352在转子驱动电机353的驱动作用下带动挡流板3521旋转并保持与第一转子351恒定过流面积;当传输信号出现波动时,在控制设备的控制作用下转子驱动电机353改变对第二转子352的驱动转速,进而改变遮挡第一过流间隙的程度以改变过流面积,从而产生泥浆压力脉动,最后通过信号处理设备4能够对检测到的压
力变化进行信号处理,获得相应的变化曲线,以利于调整钻孔参数。
124.为了保证良好的过流控制效果,优选使挡流板3521至少为两个,并沿外转轴1132的周向均匀分布。例如:图3实施方式中,挡流板3521为均匀分布的六个。
125.为了便于电器元件的安装设置并对其进行保护,再结合图2和图3所示,转轴腔112的侧壁内设有呈环形的电器腔1122;
126.转速传感器31、扭矩传感器32、温度传感器33、超声波传感器34和转子驱动电机353均设置在电器腔1122中;
127.第二转子352的边沿设有外齿环3522,外齿环3522伸入电器腔1122中;
128.转子驱动电机353至少为两个,并沿第二转子352的周向均匀分布;
129.转子驱动电机353的输出端上设置有主动齿轮3531,主动齿轮3531与外齿环3522相啮合。
130.具体的,再如图1所示,该微型桩成孔钻机还包括机架5、钻杆升降机构6和角度调控机构;
131.机架5底部设置有履带式运输机构51;
132.钻杆升降机构6包括桅杆61和升降组件62;桅杆61设置在机架5上,其下端与机架5铰接;升降组件62设置在桅杆61上,其升降驱动部621与钻杆总成1配合连接;
133.角度调控机构包括伸缩件71;伸缩件71倾斜设置,其上端与桅杆61铰接,其下端与机架5铰接。
134.通过设置带履带式运输机构51的机架5,利于使得该微型桩成孔钻机适应山地、高原等复杂地形。通过钻杆升降机构6能够驱使钻杆总成1上升或下降,钻杆升降机构6的升降组件62可以为多种,例如:液压缸、气缸、丝杆传动机构等等。通过设置的角度调控机构能够调节桅杆61的竖向角度,以便适应不同的地形进行钻孔。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。