用于导航的系统和方法
1.相关申请案的交叉引用
2.本技术包括与同时提交的美国专利申请号16/855,487(代理人案卷号5074a-000191-us)和美国专利申请号16/855,573(代理人案卷号5074a-000226-us)中公开的主题类似的主题。上述申请的全部公开内容通过引用并入本文。
技术领域
3.本公开涉及导航系统中的数据通信。
背景技术:
4.本部分提供与本公开相关的背景信息,其不一定是现有技术。
5.可对于对象(诸如人类对象)执行外科手术规程。外科手术规程可能需要到对象中的切口以获得对于由对象的真皮层覆盖的组织或器官的接近。由于被不透明组织覆盖,这些区域中的视觉访问或视敏度可能受到限制。因此,可选择确定对象内的器械的姿势。
技术实现要素:
6.本部分提供本公开的一般概述,并且不是本公开的完整范围或其全部特征的全面公开。
7.导航系统可用于跟踪和确定姿势,该姿势可包括器械随时间推移的位置和/或取向的至少一些坐标。在各种实施方案中,器械的姿势被理解为包括至少一些被跟踪或导航的位置坐标(例如,x、y、z)和/或取向坐标(例如,滚转、俯仰、偏航)。导航系统可跟踪位置和/或取向,包括六自由度运动(例如,三维位置和多个(例如,俯仰、滚转和偏航)取向)。因此,可随时间推移确定被跟踪的器械的姿势或位置和/或取向。在各种实施方案中,可通过显示设备相对于对象的一部分示出器械的视觉表示。
8.因此,导航系统可用于确定位置和/或取向和/或组合(作为姿势),包括随时间推移的器械的多个位置和/或取向和/或姿势。在各种实施方案中,可相对于对象确定被跟踪的器械的姿势。对象可以是任何适当的对象,诸如活体或非活体对象。在各种实施方案中,非活体对象可包括中空或封闭的壳体或其他适当的无生命对象。无生命对象可具有不透明的外覆盖物。因此,导航或跟踪系统可用于在使用期间相对于无生命对象跟踪器械。
9.在各种实施方案中,对象可包括活体对象,诸如人类对象。规程可包括外科手术规程,其中在选定时间段内在对象内摆放器械以执行规程,诸如支架放置、深度脑刺激探针放置、或放置或植入其他可植入构件。此外,选定规程可包括相对于对象的骨切除、孔形成等。无论如何,可通过导航系统确定器械的姿势。
10.导航系统可通过在跟踪系统的各个元件或部分之间发射数据来操作。例如,在各种实施方案中,导航系统可包括与器械连接的跟踪设备(例如,固定或合并到器械中),该跟踪设备将信号无线地发射到阵列。阵列可包括天线阵列,如本文进一步讨论的。类似地或另选地,阵列可无线地发射将由跟踪设备接收的信号。
11.可包括如本文所讨论的各种技术的扩散频谱可用于发射信号、确定失真信号并且忽略和/或校正失真信号。扩散频谱系统(诸如跳频)可包括选定信号的调制和解调,以及用于确认或消除系统内的失真或失真信号的选定信号变换。因此,导航系统可合并扩散频谱系统以确认或确定用于跟踪设备的信号。
12.根据本文提供的描述,另外的适用性领域将变得显而易见。本概述中的描述和具体示例仅旨在用于说明的目的,并且不旨在限制本公开的范围。
附图说明
13.本文所述的附图仅用于选定实施方案的说明性目的,而不是所有可能的具体实施,并且不旨在限制本公开的范围。
14.图1是示出根据各种实施方案的导航系统的概览的图解视图;
15.图2是根据各种实施方案的配准方法的流程图;
16.图3是根据各种实施方案的定位器和根据各种实施方案的跟踪器的示意图;
17.图4a是根据各种实施方案的扩散频谱导航系统中的均衡的流程图;
18.图4b是图4a的导航系统校准和均衡方法的示意图;
19.图5a是根据各种实施方案的扩散频谱导航系统中的均衡的流程图;
20.图5b是图5a的导航系统校准和均衡方法的示意图;
21.图6a是根据各种实施方案的扩散频谱导航系统中的均衡的流程图;
22.图6b是图6a的导航系统校准和均衡方法的示意图;
23.图7是根据各种实施方案的非均衡的已接收导航信号的量值响应的曲线图;
24.图8是根据各种实施方案的具有和没有失真物品的非均衡的已接收导航信号的量值响应的曲线图;
25.图9是根据各种实施方案的具有失真检测和校正的代码多路复用扩散频谱导航系统的流程图;并且
26.图10是根据各种实施方案的存在有失真物品的均衡的已接收导航信号的量值响应的曲线图。
27.在所有附图的若干个视图中,对应的附图标记指示对应的部件。
具体实施方式
28.现在将参考附图更完整地描述示例性实施方案。
29.本文公开了示例性实施方案,如本文进一步讨论的。通常,可相对于人类对象公开各种实施方案。然而,应当理解,可相对于可能具有可涵盖内部部件或操作的外壳或壳体的任何对象或系统使用各种公开的系统(诸如导航或跟踪系统)。例如,机身或汽车框架可遮挡内部部件,该内部部件可被选择为在选定规程中进行操作。选定规程可包括任何非生命或无生命系统的各种部件的移除、替换等。因此,应当理解,本文相对于对象(诸如人类对象)的讨论仅是示例性的。
30.此外,如本文所讨论的,导航系统可包括相对于坐标系或空间内的参考系跟踪各种部件(诸如器械)。在各种实施方案中,坐标空间可包括对象坐标空间或由相对于对象的真实空间限定的真实空间。附加坐标空间可包括图像空间,该图像空间具有限定对象的图
像的图像坐标空间。如上所讨论,可包括器械的位置和取向的器械的姿势可相对于图像示出(例如叠加在图像上),该图像具有供使用者查看的图形表示。此类图示可能需要或使用对象空间或对象坐标空间与图像坐标空间或图像空间之间的配准。
31.用于将对象所限定的对象空间配准到图像空间的方法可包括美国专利号8,737,708;美国专利号9,737,235;美国专利号8,503,745;和美国专利号8,175,681中公开的那些;所有这些专利通过引用并入本文。
32.根据各种实施方案,图1是示出手术室或手术环境的概览的图解视图。在各种实施方案中,手术室可包括外科手术套件。外科手术套件可包括导航系统26,该导航系统可用于各种规程,诸如相对于对象30的规程。
33.导航系统26可用于跟踪一个或多个跟踪设备的姿势,并且跟踪设备可包括对象跟踪设备或动态参考系(drf)58、成像系统跟踪设备62和/或工具跟踪设备66。应当理解,还可包括其他跟踪设备,诸如单独地或与其他系统(例如,增强现实系统)组合的使用者或临床医生跟踪设备。工具68可以是任何合适的工具,例如钻头、镊子或由使用者72操作的其他工具。工具68还可包括植入物,例如脊椎植入物或整形外科植入物。应当进一步注意的是,导航系统26可以用于导航任何类型的器械、植入物或递送系统,包括:导丝、关节镜系统、矫形植入物、脊柱植入物、脑深部刺激(dbs)探针等。此外,这些器械可以用于导航或映射身体的任何区域。导航系统26和各种器械可以用于任何适当手术中,例如通常微创手术或开放式手术的器械。
34.成像设备80可用于获取对象例如对象30的术前、术中或术后或实时图像数据。然而,应当理解,可以对任何适当的对象成像,并且可以相对于对象实施任何适当的手术。在所示出的实例中,成像系统80包括由在美国科罗拉多州路易斯维尔设有营业场所的美敦力导航公司销售的成像设备。成像设备80可以具有大致环形的机架壳体82,图像捕获部分可移动地放置在该机架壳体中。图像捕获部分可以包括x射线源或发射部分,并且x射线接收部分或图像接收部分彼此大体上或实际上尽可能成180度定位,并且相对于轨道或导轨安装在转子上。图像捕获部分可以用于在图像获取期间旋转360度。图像捕获部分可以绕中心点或轴线旋转,从而允许从多个方向或在多个平面中获取对象30的图像数据。成像设备80可包括美国专利号7,188,998;7,108,421;7,106,825;7,001,045;和6,940,941中公开的那些;所有这些专利申请通过引用并入本文,或其任何适当部分。在一个示例中,成像设备80可以利用具有1,720
×
1,024像素可视区域的平板技术。
35.可以相对于成像设备80的任何其他部分精确地知道成像设备80和/或其中的部分例如图像捕获部分的位置。根据各种实施方案,成像设备80可以知道并相对于固定坐标系或选定坐标系再调用精确的坐标。这可以允许成像系统80知道其相对于患者30或其他参考的位置。另外,如本文所讨论的,图像捕获部分的位置的精确知识可以与跟踪系统结合使用,以确定图像捕获部分的位置和相对于被跟踪的对象如患者30等的图像数据。
36.成像设备80也可以用图像跟踪设备62来跟踪。根据各种实施方案,限定患者30的获取的图像空间的图像数据可以相对于目标空间固有地或自动地配准。目标空间可以是由患者30在导航系统26中限定的空间。自动配准可以通过在成像设备80上包括跟踪设备62和/或图像捕获部分的可确定的精确姿势来实现。根据各种实施方案,如本文所讨论的,还可使用可成像部分、虚拟基准点和其他特征来允许自动或以其他方式的配准。然而,将理解
的是,可以获取将限定对象空间的任何对象的图像数据。患者空间是示例性的对象空间。配准允许在患者空间与图像空间之间进行映射。
37.患者30也可以在患者移动时使用患者跟踪设备、drf或跟踪器58来跟踪。替代地或除此之外,患者30可以固定在由导航系统26限定的导航空间内,以允许配准。如本文进一步讨论的,图像空间与患者空间或对象空间的配准允许使用图像数据来导航器械68。当导航器械68时,器械68的姿势可以在显示设备84上相对于患者30的获取的图像数据被示出。各种跟踪系统,包括光学定位器88或电磁(em)定位器94中的至少一者,可用于跟踪器械68。如本文所讨论的,在各种实施方案中,定位器94可发射由跟踪设备66或其他适当的跟踪设备接收的信号。此外,适当天线(例如,线圈)也可被设置为接收的。例如,校准接收器95(例如,线圈)可被设置为从定位器94接收信号。校准接收器95可包括在导航系统26的任何适当部分(诸如控制器110)中,如本文进一步讨论的。本领域技术人员应当理解,校准接收器95不需要在使用期间合并到导航系统26中,但可在导航系统26的初始(例如,工厂)生产或校准期间设置或使用。在各种实施方案中,校准接收器95可以与跟踪设备66类似的方式接收来自定位器94的信号并且用于各种目的,如本文所讨论。
38.可以使用一个以上的跟踪系统来跟踪导航系统26中的器械68。根据各种实施方案,跟踪系统可以包括具有电磁跟踪(em)定位器94的em系统和/或具有光学定位器88的光学跟踪系统。如本文所讨论的,跟踪系统中的一个或两个均可以用于跟踪选定的跟踪设备。应当理解,除非另外讨论,否则跟踪设备可以是具有被选定跟踪系统的可跟踪部分。跟踪设备不必指跟踪设备所附着或关联的整个构件或结构。
39.还应理解,成像设备80可以是不同于成像设备的成像设备,并且可以额外地或替代地包括荧光镜c形臂。其他示例性成像设备可以包括荧光镜仪,例如双平面荧光镜系统、天花板安装荧光镜系统、导管实验室荧光镜系统、固定c臂荧光镜系统、等心c臂荧光镜系统、3d荧光镜系统等。其他合适的成像设备还可以包括mri、ct、超声等。
40.在各种实施方案中,成像设备控制器96可以控制成像设备80,并且可以接收在图像捕获部分生成的图像数据,并且存储图像以备后用。控制器96还可以控制成像设备80的图像捕获部分的旋转。应当理解,控制器96不需要与机架外壳82成为一体,而是可以与其分离。例如,控制器可以是导航系统26的一部分,该导航系统可以包括处理系统和/或控制系统98,该处理系统和/或控制系统包括处理单元或处理部分102。然而,控制器96可以与机架82整合在一起,并且可以包括例如手提计算机中的第二处理器和单独的处理器。
41.患者30可以定位(包括固定)在手术台104上。根据一个实例,手术台104可以是由在日本东京设有营业场所的mizuho ikakogyo公司的分公司osi或在美国加利福尼亚州设有经营场所的orthopedic systems公司出售的axis手术台。患者定位设备可与手术台一起使用,并且包括夹具或在2004年10月7日公布的名称为“集成电磁导航和患者定位设备(an integrated electromagnetic navigation and patient positioning devic)”的美国专利申请公布号2004/0199072(美国专利申请号10/405,068)中阐述的那些,该专利据此通过引用并入。
42.因此,可以通过导航系统26确定患者30相对于成像系统80的位置。跟踪设备62可用于跟踪成像设备80的至少一部分(例如机架或外壳82)并确定其姿势。如本文进一步讨论
的,可以用动态参考系58跟踪患者30。因此,可以确定患者30相对于成像系统80的位置。此外,由于成像部分在外壳82内的导轨上的精确位置、基本上不灵活的转子等,可以相对于外壳82确定成像部分的姿势。如果成像设备80是由在科罗拉多州路易斯维尔设有营业场所的美敦力导航公司出售的成像设备,则成像设备80可以包括例如在10微米以内的精度。成像部分的精确定位在美国专利号7,188,998;7,108,421;7,106,825;7,001,045;和6,940,941中进一步描述;所有这些专利申请通过引用并入本文。
43.根据各种实施方案,成像设备80可以从x射线源生成和/或发射x射线,该x射线传播通过患者30并且被x射线成像接收部分接收。图像捕获部分生成表示接收到的x射线强度的图像数据。通常,图像捕获部分可以包括首先将x射线转换为可见光的图像增强器和将可见光转换为数字图像数据的照相机(例如电荷耦合设备)。图像捕获部分也可以是将x射线直接转换为数字图像数据以形成图像的数字设备,从而潜在地避免了由于首先转换为可见光而引起的失真。
44.可由成像设备80拍摄的二维和/或三维荧光镜图像数据可以被捕获并存储在成像设备控制器96中。还可以捕获和组合由成像设备80获取的多个图像数据以提供患者30的整个区域的更大视图或图像,而不是仅针对患者30的一部分区域。例如,患者30的脊柱的多个图像数据可以附加在一起,以提供脊柱的完整视图或完整的一组图像数据。
45.然后可以将图像数据从图像设备控制器96转发到导航计算机和/或处理器系统102,该导航计算机和/或处理器系统102可以是具有显示器84和用户界面106的控制器或工作站98的一部分。还可以理解,图像数据不一定首先保存在控制器96中,也可以直接传送到工作站98。工作站98可以提供设施,该设施用于在显示器84上将图像数据显示为图像108并且用于保存、数字处理或打印接收的图像数据的硬拷贝图像。可以是键盘、鼠标、触摸笔、触摸屏或其他合适设备的用户接口106允许用户72提供输入,以经由图像设备控制器96控制成像设备80或调整显示器84的图像设置。工作站98还可以指示图像设备控制器96调整成像设备80的图像捕获部分,以获得沿不同平面的各种二维图像,从而生成具有代表性的二维图像数据和三维图像数据。
46.继续参考图1,导航系统26还可以包括跟踪系统,该跟踪系统包括电磁(em)定位器94和/或光学定位器88中的一个或两个。跟踪系统可以包括控制器和接口部分110。控制器110可以连接到处理器部分102,该处理器部分可以包括包含在计算机内的处理器。em跟踪系统可以包括由在科罗拉多州路易斯维尔设有营业地点的美敦力导航公司销售的axiem
tm
导航系统;或可以是以下专利中描述的em跟踪系统:2004年9月15日提交并且名称为“用于外科手术导航的方法和装置(method and apparatus for surgical navigation)”的美国专利申请序列号10/941,782;1999年6月22日发布的名称为“位置定位系统(position location system)”的美国专利号5,913,820;和1997年1月14日发布的名称为“用于导航导管探针的方法和系统(method and system for navigating a catheter probe)”的美国专利号5,592,939;这些专利中的每一者以引用方式并入本文。应当理解,导航系统26还可以是或包括任何适当的跟踪系统,包括具有光学定位器的当理解,导航系统26还可以是或包括任何适当的跟踪系统,包括具有光学定位器的或s7
tm
跟踪系统,其可以用作光学定位器88,并且由位于科罗拉多州路易斯维尔市的美敦力导航公司出售。其他跟踪系统包括声学系统、辐射系
统、雷达系统等。跟踪系统可以根据在上面结合的参考文献中的通常已知的或描述的技术来使用。除非阐明主题公开的选定操作,否则本文将不包括细节。
47.有线连接件或物理连接件可以互连跟踪系统、成像设备80等。另选地,与直接耦合到控制器110不同,各个部分例如器械68可以采用无线通信信道,例如在2002年11月5日发布的名称为“外科手术通信电源系统(surgical communication power system)”的美国专利号6,474,341中公开的,该专利通过引用并入本文。此外,跟踪设备62、66可以生成由定位器88、94感测的场和/或信号。在各种实施方案中,器械跟踪设备66和/或其他适当的跟踪设备可如本文所讨论的那样通过无线信号113与控制器110和/或阵列94通信。在各种实施方案中,阵列94可通过扩散频谱信号操作以与跟踪设备66通信。
48.导航系统26的各个部分,例如器械68,以及下面将详细描述的其他部分,可以配备至少一个并且通常是多个的跟踪设备66。该器械还可包括多于一种类型或形态的跟踪设备66,例如em跟踪设备和/或光学跟踪设备。器械68可包括在近端处的可抓握或可操纵部分,并且跟踪设备可固定在器械68的可操纵部分附近。然而,应当理解,跟踪设备也可放置在器械68的远侧或干预端部处。
49.1999年11月9日发布的标题为《导管定位系统和方法》的美国专利号5,983,126中阐述了另外的代表性或替代性的定位和跟踪系统,该专利在此通过引用并入本文。导航系统26可以是包括来自各种跟踪系统的部件的混合系统。
50.根据各种实施方案,导航系统26可用于相对于患者30跟踪器械68。器械68可通过跟踪系统来跟踪,如本文所讨论,诸如通过跟踪和确定跟踪设备66的姿势。患者30或适当对象的图像数据可用于帮助使用者72引导器械68。然而,图像数据被配准到患者30。图像数据限定了图像空间,该图像空间配准到由患者30限定的患者空间。可以如本文所讨论的那样自动地、手动地或它们的组合来执行配准。
51.通常,配准允许相对于图像数据的图像空间生成器械68的物理姿势的映射(也称为配准映射)。映射允许器械68的跟踪姿势相对于图像数据108显示在显示设备84上。应当理解,显示设备84可以是任何适当的显示设备,或者包括多于单个显示设备,诸如包括增强现实查看器、头戴式显示器等。图形表示68i(也称为图标)可用于示出器械68相对于图像108的姿势(例如,三维坐标位置和一个或多个自由度取向)。
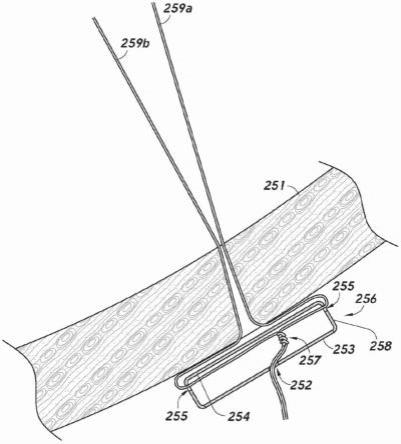
52.继续参考图1并另外参考图2,对象配准系统或方法可以使用对象跟踪设备58。跟踪设备58可包括可跟踪的部分或构件120,但也可用作基准点组件或可操作为基准点组件。基准点组件120可以包括夹具或其他固定部分124和可成像基准点主体120。然而,应当理解,构件120可以与跟踪设备58分开。可以提供固定部分124以固定任何合适的部分例如解剖结构的一部分。如图1所示,基准点组件120可以与脊柱的一部分(诸如对象30的棘突)互连。
53.固定部分124可以以任何合适的方式与棘突互连。例如,可以将销钉或螺钉驱动入棘突中。另选地或除此之外,可以提供夹具部分124以互连棘突。基准点部分120可以用成像设备80成像。然而,应当理解,对象的各个部分(例如棘突)也可以用作基准点部分。
54.在各种实施方式中,当基准点部分120用成像设备80成像时,生成包括或识别基准点部分120的图像数据。基准点部分120可以在图像数据中自动(例如通过执行程序的处理器)、手动(例如通过选择使用者72的标识)或其组合(例如通过选择种子点的使用者72的标
识和由执行程序的处理器执行的分段)进行识别。自动可成像部分识别的方法包括在2012年4月3日发布的美国专利号8,150,494中公开的方法,该专利通过引用并入本文。手动识别可包括选择图像数据中的元素(例如像素)或区域,其中可成像部分已被成像。无论如何,在图像数据中识别的基准点部分120可用作基准点或基准点位置,该基准点或基准点位置可用于将图像数据或图像数据的图像空间与患者空间配准。
55.在各种实施方案中,为了将图像空间或坐标系配准到另一个空间或坐标系,例如导航空间,然后可以以适当的方式在由对象30限定的对象空间中识别在图像108中识别的基准点部分120。例如,如果基准点部分在获取图像数据以生成图像108期间在相同位置附接到对象30,则使用者72可以相对于对象30移动器械68,以接触基准点部分120。应当理解,如上文在各种实施方案中所讨论的,基准点部分120可以附接到对象30和/或可以包括对象30的解剖部分。另外,跟踪设备可以被并入基准点部分120中,并且它们可以在获取图像之后与对象30一起保持。在这种情况下,可以在对象空间中进行基准点部分120的配准或识别。然而,根据各种实施方式,使用者72可以移动器械68以接触基准点部分120。
56.根据各种实施方案,跟踪系统可由于附接到器械68的跟踪设备66而跟踪该器械的姿势。这允许使用者72在导航空间(其可包括或可以是对象空间的一部分)中识别在图像108中识别的基准点部分120的姿势(包括例如六个自由度信息,其包括定位和取向)。在识别基准点部分120在导航空间中的位置之后,可以在导航空间中由对象30限定的主题空间与由图像108限定的图像空间之间进行映射。因此,如本文进一步讨论的,相同或已知位置允许配准。
57.在配准期间,在诸如图像108等的图像数据的图像数据坐标系与由患者30限定的患者空间之间确定映射。一旦发生配准,器械68就可以用配准到图像数据的跟踪系统进行跟踪,以允许将被跟踪器械68的姿势识别和图示为叠加在图像数据上的图标。图像108(或任何选择的图像数据)到对象30的配准可以在任何适当的时间发生。
58.在各种实施方案中,可根据方法150配准图像空间108和由对象30定义的对象空间。如上所讨论,图像到患者的配准可包括在框152中获取和/或访问具有基准点的对象(诸如对象30)的图像数据(例如,来自在其上存储有图像数据的存储器系统)。对象30的图像数据可以是任何适当的图像数据,诸如用成像系统80获取的图像数据。此外,如上所述,基准点可以包括基准点部分120和/或对象30的适当解剖部分。例如,基准点部分可以包括解剖结构的部分,诸如对象30的棘突。然而,所获取的图像数据可以在其中包括基准点。一旦获取了具有基准点的对象的图像数据,图像空间中的基准点的识别就可以在框154中发生。
59.也如上文所讨论的,可以发生框154中的图像空间中的基准点的识别。例如,可以在限定图像空间的图像数据中进行基准点的自动识别,诸如通过图像内基准点部分的自动分割。还可以使用手动识别和/或组合手动和自动识别来确定图像空间中的基准点。该组合可包括使用者72将一个或多个像素识别为种子像素以及处理器基于种子像素执行分割程序。
60.对象空间和/或导航空间中的基准点的识别发生在框156中。对象空间可以与导航空间共同扩展和/或可以重叠。通常,导航空间是可以用跟踪系统诸如定位器94跟踪的体积,并且可以包含对象或患者30的全部或一部分。导航空间中的基准点的识别可以以各种方式发生,诸如相对于基准点部分120(其也可以是跟踪设备)和/或棘突移动可跟踪器械诸
如器械68。导航系统26的跟踪系统可以跟踪器械68,并且导航系统26可以包括用于输入导航空间中的基准点部分120的部分的输入端。然后可使用导航空间中的基准点的姿势的确定或识别(例如,包括以包括三维位置和取向的选定自由度信息),以便在框160中形成两个或更多个坐标系之间的映射。
61.在框160中确定的映射的确定可以是图像空间的坐标系相对于对象和/或包括对象30与导航空间的坐标系的相关性或与其的配准。映射允许将导航空间中的跟踪部分的确定姿势映射到图像中的等效或相同姿势。一旦确定了映射姿势,诸如通过将图标68i叠加在图像108上或通过该图标相对于该图像的叠加,就可以相对于图像108用显示器图示或显示姿势。
62.图像到患者的配准允许相对于图像108图示跟踪的器械或物品。然而,在没有配准的情况下,任何不可跟踪或配准到图像108的元素均可能无法在相对于图像108的真实世界姿势处适当地或精确地图示。因此,配准可允许诸如通过图标68i来示出器械68相对于对象30的已确定姿势。
63.在将图像空间配准到患者空间之后,可以相对于图像108跟踪器械68。如图1所示,可以在显示器84上相对于图像108显示表示器械68的姿势(其可以包括6自由度姿势(包括3维度位置和3自由度取向))的图标68i。由于图像空间到患者空间的配准,图标68i相对于图像108的姿势可以基本上识别或模拟器械68相对于患者空间中的患者30的姿势。如上所述,这可以允许导航过程发生。
64.另外参考图2和图3,并且继续参考图1,定位器94(其也可被称为阵列或天线阵列)可以任何物理配置设置以用于选定或适当的规程。例如,如图1所示,定位器94被设置或形成为包括选定几何形状,诸如瓣形。在各种实施方案中,如图3所示,定位器94的形状可以是平面的或更细长的。定位器94可包括多个线圈(诸如任何适当的数量)以生成导航场或域。导航场或域可包括体积180。导航体积180通常相对于对象30设定大小或移动或放置以允许相对于对象30导航一个或多个器械(诸如器械68)。器械68可包括一个或多个跟踪设备(诸如工具跟踪设备66)。如本文进一步讨论的,阵列94可发射信号,该信号可由跟踪设备66或其他适当跟踪设备(诸如对象跟踪器58和/或成像设备跟踪器62)接收。
65.在各种实施方案中,阵列94可被合并到床或支撑件104中。另选地或除此之外,阵列94可被配置成一定形状或大小,使得阵列可放置在对象30下方并且对象30放置在阵列94的至少一部分的顶部处。在各种实施方案中,例如,阵列94可放置(例如,固定)在对象30的腰椎和/或对象30的头部附近,以便允许导航场180居中和/或涵盖用于导航的对象30的选定区域。
66.导航系统26可在选定环境中进行操作,诸如在包括除器械68之外的各种其他部件的手术室中。例如,导航系统26可在包括成像系统80、手术台104和/或其他部件的手术室中操作。此外,多个器械可被设置用于选定规程,诸如器械68和附加或另选的器械(诸如可放置在存储或保持区域71中的钻头电机69)。保持区域71可包括导电和/或磁性材料,诸如金属托盘或导电聚合物托盘。托盘71可由各种或选定的金属或金属合金(诸如铝或不锈钢)形成。在各种实施方案中,由阵列94发射的信号可由于来自各种金属物质(诸如托盘71、钻头69、成像系统80、或其中放置有导航系统26的手术室中的其他金属部分)的相互作用或失真而被干扰。可使场或信号失真的对象或物品可被称为失真(distorting或distortion)对
象。
67.如本文进一步讨论的,可操作阵列94以发出信号或场。由定位器94发出的场可由跟踪设备中的一者或多者(诸如器械跟踪设备66)感测。因此,由阵列94发出的场可能由于导航体积180中或附近的金属对象而失真。因此,由跟踪设备66或导航系统26中的其他跟踪设备接收的信号可包括发出的信号和失真两者。失真可由导电物品中的涡流或磁性物品中的磁化生成,这些物品在本文中可被称为“失真物品”。由跟踪设备66接收的信号可被发射到适当的处理系统,诸如控制器110和/或处理单元102中的一个或多个处理器。如果对象靠近导致失真的导航体积180,则所接收的信号可包括失真。因此,失真检测和校正(ddc)模块190(其可包括均衡)可被合并或由处理单元102执行。如本文进一步讨论的,ddc模块190可用于辅助从由跟踪设备66接收的信号中移除失真。一旦在ddc模块190中移除失真,导航模块198也可被合并到处理单元102中和/或由处理单元102执行。导航模块198通过已校正信号进行导航以确定跟踪设备66在导航体积180中的姿势。因此,跟踪信号可由定位器发出并且由跟踪设备66接收。所接收的跟踪信号可包括失真。如上所讨论,包括在跟踪设备66中的器械68的导航可允许相对于对象30的图像108示出器械68的图形表示68i。
68.因此,由于导航配准,使用者72可通过监视器84查看器械68相对于对象30的姿势。本领域技术人员应当理解,跟踪设备66还可发射由定位器94接收的信号。发射信号可由定位器94接收,并且类似的均衡器和导航模块可用于以类似方式确定跟踪设备66相对于对象30的姿势,但其中信号由定位器94接收,而不是由定位器94发射。进一步地,本领域技术人员将理解,当基本上同时在导航体积180中相对于对象30跟踪多个器械时,可基本上同时导航多个器械以允许同时相对于图像108示出多个器械。
69.不管其配置或外部几何形状如何,定位器94可包括一个或多个线圈200。定位器可包括适当数量的线圈200,诸如足以发射要在跟踪设备66处进行分辨以导航跟踪设备66的信号。因此,定位器94可包括一个或多个线圈200,包括九个或更多个线圈、12个或更多个线圈200、或多达36个线圈、或适当数量的线圈200。线圈200可以任何适当的数量设置并且本文所讨论的数量仅是示例性的。例如,定位器94可包括基本上正交取向并且相对于彼此围绕单个中心或原点放置的三个线圈。另选地或除此之外,一个或多个线圈可在定位器94内相对于彼此以选定角度放置和取向。无论配置如何,一个或多个线圈通过电磁(em)信号生成导航场,该导航场可由相应跟踪设备(包括跟踪设备66)感测以允许确定跟踪设备66在空间中的姿势。
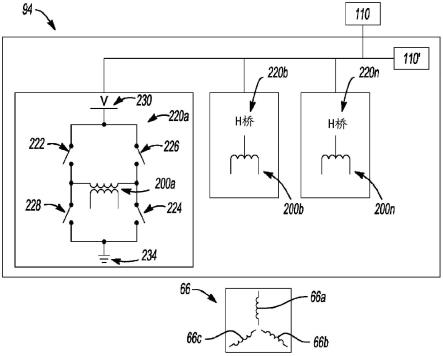
70.继续参考图1并附加参考图3,定位器94可以任何适当的方式配置,包括本文所讨论的那些。图3所示的示例是矩形定位器组件。定位器组件94可包括一个或多个线圈200(诸如第一线圈200a)。线圈200a可连同一个或多个其他线圈(诸如第二线圈200b)包括在定位器94中。应当理解,可提供任何适当数量的线圈,并且两个线圈200a、200b仅是示例性的。另外,定位器94可由控制器110控制和/或具有机载控制器(诸如控制器或控制模块110')。另外,在各种实施方案中,本地电源或电力转换器可设置在定位器94处。例如,电力转换器或电池可被设置成向控制器110'和/或线圈200提供电力以发射跟踪信号。在各种实施方案中,作为本地电源的替代和/或补充,外部电源可从远离定位器94的位置向控制器110、110'和/或线圈200传输电力。
71.无论数量或配置如何,可驱动相应线圈(包括线圈200)以发射可由跟踪设备66接
收的信号。在各种实施方案中,例如,相应线圈200a、200b可被放置或合并到“h”桥配置或开关系统中。参考线圈200a,并且理解第二线圈200b可合并到类似配置中,线圈200a可通过多个开关互连在驱动源与接地之间。在各种实施方案中,例如,线圈200a可被集成到“h”桥组件220中。“h”桥组件220可包括多个开关,该多个开关包括第一开关222、第二开关224、第三开关226和第四开关228。开关222-228可选择性地允许电流从源或电压源230驱动通过线圈200a到接地或出口234。
72.例如,第一开关222和第二开关224可被闭合以允许电压跨线圈220a形成并且允许电流在第一方向上流过线圈200a。类似地,第三开关226和第四开关228可闭合(其中相应的第一开关222和第二开关224打开)以允许电流在第二方向上被驱动通过线圈200a。如上所讨论,控制器110可用于控制选定开关以使电流穿过线圈200a。电流穿过线圈200a以致使信号由线圈200a发出并且由跟踪设备66接收。
73.类似地,“h”桥220b可连接到线圈200b并且以类似的方式操作。控制器110和/或控制器110'可操作“h”桥组件220a、220b中的两者以通过相应线圈200a、200b供电或发射信号。应当理解,“h”桥组件可以任何适当的方式相对于相应线圈设置,诸如通过手动或物理开关、晶体管开关或任何适当开关。此外,如上所讨论,可向定位器94提供任何适当数量的线圈以生成导航场,该导航场被选择为生成或提供导航体积180。图3的示意图或图示仅为示例的以用于当前讨论。
74.线圈(诸如线圈200a)可经由“h”桥组件220a供电以提供用于器械68的导航的信号。“h”桥组件220a可设置在定位器94中以允许线圈200a被驱动,同时维持线圈200a和定位器94的选定能量或场发出和热量生成。因此,定位器94可包括适当数量的线圈,诸如介于1和36个线圈之间,包括三个线圈到15个线圈,同时仍维持选定的场发出和热量生成。如本文所讨论,多个线圈可以适当的方式通过控制器110、110'驱动以生成导航域180。
75.跟踪系统可包括定位器94,如上所讨论。定位器94可由控制器110控制。定位器94可发射场或发出可由器械68的跟踪设备66感测的场113。应当理解,其他适当的跟踪设备或接收设备(例如,校准接收器95)也可感测定位器94的场113。可以适当的方式生成场113,诸如包括或具有扩散频谱。此外或另选地,场113还可具有可由跟踪设备66感测的调制。如本文进一步讨论的,场113可辅助减小或消除由跟踪设备66感测的场的失真或干扰,其是由于干扰(也称为失真(distorting或distortion))对象。
76.如上文所讨论,根据适当的发射系统,定位器94可由控制器110、110'控制(本文中的与控制器110相关的讨论旨在涵盖所有适当的控制器,包括上文所论述的那些,并且对仅控制器110的参考只是为了便于当前讨论)。如上所讨论,线圈诸如线圈200a(本文中的对单个线圈200a的讨论也只是示例性的并且是为了便于当前讨论)可通过“h”桥配置220a供电或连接。“h”桥配置220可以任何适当的方式设置,包括可通过控制器110操作的开关(例如,物理或手动)和/或晶体管。无论如何,定位器94的该线圈或多个线圈可被操作以通过二进制发射系统或方案(包括二进制接近正交(bno)发射系统或方案)来进行发射。定位器94的该线圈或多个线圈可被操作以发射信号作为二进制接近正交(bno)序列的集合,从而用于有效恢复导航场中的发射信号以及系统的脉冲响应和失真器(也称为失真物品)的脉冲响应。
77.在bno方案下,伪随机二进制(prb)序列(也称为伪噪声二进制(prb)序列,其中一
种此类类型是最大长度(ml)序列)可通过控制器110来生成以便由定位器94作为跟踪信号113发射。跟踪信号113的发射也可以是扩散频谱发射,使得其跨越大或宽的频谱或在大或宽的频谱上扩散,该频谱也可由于时间而被分割。
78.pn序列可以大致正交或接近正交的方式设置以提供用于由跟踪设备66或其他适当的跟踪设备接收的适当发射。跟踪信号113可用于跟踪设备66的导航。另外,单个跟踪设备66或本文的导航系统26的任何适当或单个部分的讨论仅是示例性的并且旨在用于简化当前讨论,除非另有特别指示。
79.因此,在各种实施方案中,发射相同重复pn序列的循环移位或偏移,在每个发射线圈上发射一者。统计上,pn序列的自相关函数在偏移零下等于1并且在所有其他偏移下等于其中序列长度等于2
n-1并且序列发生器位的数量等于n,其中n=14在各种实施方案中可用。从序列的任何不同偏移对针对任何足够大的值“n”为较差相关的意义而言,pn序列的循环移位或偏移可被理解为彼此几乎正交。解调重复pn帧中的所有循环移位幅度的系统可通过乘以pn泄漏矩阵的逆来恢复相关联的线圈信号幅度,该pn泄漏矩阵的逆在对角线上具有1并且在其他地方具有此外,当发射线圈的pn偏移具有大于失真器响应持续时间(即,接收来自失真对象的失真的时间)的间隔时,该方法可恢复对每个发射器线圈的失真器脉冲响应。在各种实施方案中,偏移可以是10个序列发生器位。选择方法可用于执行上文讨论的计算,包括jens hee的“使用mls的脉冲响应测量(impulse response measurements using mls)”http://www.jenshee.dk/signalprocessing/mls.pdf(2003)中描述的经由快速沃尔什变换的沃尔什-阿达玛变换。方法可用于直接执行解调(所有偏移下的pn序列所进行的乘法)和泄漏逆转。
80.如上所讨论,控制器110可为线圈200a供电以发射可由跟踪设备66接收的信号。应当理解,如上所讨论,跟踪设备66还可以如本文所讨论的类似方式发射信号,该信号由定位器94的一个或多个线圈接收。跟踪设备66还可包括多个线圈,诸如围绕中心点彼此基本上正交地取向和/或彼此分离的线圈。在各种示例中,跟踪设备66可包括多个线圈,诸如三个线圈66a、66b和66c。然而,跟踪设备66或任何适当的接收线圈设备(例如,校准接收器95)可包括选定数量的线圈,例如,一个线圈、多于一个线圈、至少三个线圈或多于三个线圈,诸如六个线圈。接收线圈的数量可适合于导航跟踪设备66。线圈中的每一者可由选定导电材料形成以在其中通过来自定位器的信号引起电流。在各种实施方案中,线圈可包括围绕印刷电路板(pcb)上形成的中心和/或迹线缠绕的线。然而,如本文所讨论的,跟踪设备66可从定位器94接收信号,但本领域技术人员应当理解,定位器可从跟踪设备接收信号,反之亦然。
81.在各种实施方案中,如上文所讨论,控制器100可致使或发信号通知定位器94的一个或多个线圈(诸如线圈200a)发射信号,该信号也可称为跟踪信号,如本文所讨论。线圈200可由选定导电材料形成,诸如金属或金属合金线的线圈。根据从发射线圈接收的连续发射的bno信号集计算脉冲响应。跟踪信号是包括相同二进制pn信号的bno信号集,该相同二进制pn信号针对定位器的每个线圈延迟不同量。线圈间偏移可包括选定时间延迟间隔,其大于金属失真器脉冲响应长度的长度。信号延迟或间隔可包括选定持续时间(诸如约1至20毫秒,包括5至10毫秒),在来自每个线圈的信号之间具有等效或更大的间隔。
82.所发射的跟踪信号可处于任何适当的频率范围内,诸如在约5赫兹(hz)至约30兆赫(mhz)的频率范围内,还包括约10hz至约3mhz,并且还包括约10hz至约400千赫兹(khz)。可以选定频率或在选定范围内以扩散频谱方式通过频率范围发射信号。例如,扩散频谱信号可跨约1hz至30mhz的频谱发射信号,包括以等于或约为375khz的样本速率发射的约10hz至约400khz。在各种实施方案中,对信号的控制是样本速率和波形,其可包括二进制驱动波形。从直流电(d.c.)到样本速率,频谱可以是平坦的。因此,在各种实施方案中,频谱在导航器械时是平坦的,如上所讨论。经由h桥配置的控制器可以选定频率或跨选定频率附近的频率的扩散频谱来驱动线圈(诸如线圈200a)。
83.如上所讨论,定位器94可通过线圈中的一者或多者(诸如线圈200a)发射来自控制器110的信号。如上文进一步讨论,h桥配置220a可以任何适当的配置设置,诸如在开关222-228处包括晶体管。因此,控制器100可致使线圈200a发射将由跟踪设备66接收的信号(例如,电磁信号)。然而,导航系统26可使用任何适当的方式(包括但不限于h桥电路和闭环模拟电路)来发射磁性信号。
84.参考图4a和图4b,示出了发射到接收校准和/或均衡(c/e)规程300及其相关示意图。如本文所讨论的,参考图5a和图5b以及图6a和图6b,可使用各种附加和/或另选的c/e方法和系统。在各种实施方案中,c/e可包括或被执行作为全系统c/e和/或作为各种子信道或部件。
85.首先参考图4a和图4b,c/e规程300可以是全系统c/e(也称为端到端c/e),包括各种规程步骤,诸如在开始框310中开始。在开始框310中开始之后,在框311(示意性地被示为311')中,可从控制器110生成校准或均衡信号并且将该信号发送到定位器94(其也可称为发射器)。然后,在框314(示意性地被示为314')中,可从定位器94发射校准信号,该校准信号将诸如在校准接收线圈95和/或其他适当接收器(诸如跟踪设备66)处被接收。在框314中的校准信号的发射可包括根据扩散频谱方案发射校准信号,如上所讨论。另外,发射可包括来自线圈200a和定位器94的其他线圈200的pn信号。
86.如上所讨论,由线圈发送的信号可被生成为pn序列。pn序列可包括选定长度,诸如序列中的1023到16383的长度。各种线圈可相对于彼此偏离适当数量(诸如约1023长度)以实现定位器94的若干线圈200之间的区分。可通过控制器110生成并发射pn序列。如上所讨论,处于选定频率或扩散频谱的发射信号将分别由跟踪设备66和/或其他适当接收器(诸如校准接收器95)接收(甚至在本文中仅参考一个接收器线圈)。因此,线圈200可在适当的时间(诸如按顺序或基本上同时地)生成信号或发射信号以便由跟踪设备66接收。可根据任何适当的技术生成pn序列。在各种实施方案中,例如,可通过不可约多项式来生成pn序列。
87.在框318(示意性地被示为318')中,跟踪设备66可接收所发射的校准信号并将所接收的信号发射到控制器110。然后可对框318中的所接收的校准信号采样,并且可由控制器120(或任何适当的处理器系统)执行各种计算以在框322中执行校准。框322中的校准可包括基于各种参数(诸如发射距离、已知姿势下的场强度、或其他适当的校准参数)的校准。
88.框322中的校准可根据适当的技术来执行,如下所讨论。在各种实施方案中,框322中的校准可包括脉冲响应归一化,其经由相对于包括线圈200中的一者或多者的定位器94将跟踪设备66(例如,包括线圈)放置在固定姿势。发射校准可包括经由外部或单独的磁力计和/或如先前在跟踪设备66(例如,感测线圈)处表征的发射磁场测量。接收器线圈校准可
包括经由跟踪设备处或附近的外部多量计和/或如先前通过跟踪设备66(例如,感测线圈)表征的接收电压测量。
89.框322中的校准可包括确保在选定姿势下的已知或清洁房间场强度。校准可包括将定位器94放置在选定位置(其也可被称为原点)处,并且使跟踪设备66或适当的接收跟踪设备以多个已知姿势(即位置和取向)相对于原点移动。然后可在校准322中使用由跟踪设备66接收的信号。例如,当信号开始并行进通过发射器(例如,定位器94)电路和滤波器、发射器线圈、空气、跟踪设备66线圈、与跟踪设备66相关或一起包括的电路和滤波器时,并且然后当在控制器处接收回信号时,校准可包括或考虑信号中的可能失真或噪声。
90.然后可在框324中的均衡步骤中均衡校准,而无论如何确定(包括如上所讨论的)。在框324中的均衡中,确定定位器94的线圈200中的每一者和跟踪设备66之间的均衡。每个发射线圈200和跟踪设备66可被均衡以用于脉冲响应恢复和信号的归一化。应当理解,跟踪设备66的讨论可包括跟踪设备66中的多个线圈(诸如三个线圈,如上所讨论)的讨论。因此,均衡可介于定位器94的线圈200中的每一者与跟踪设备66的线圈中的每一者之间。例如,在线圈200a与线圈66a、66b和66c中的每一者之间。
91.均衡包括移除失真和/或考虑系统的噪声(包括来自控制器110以及定位器94和接收器66的各种电路)以允许从无干扰系统恢复离散时间二进制信号。通常,均衡通过移除驱动器和接收硬件的失真来执行,并且将仅留下来自任何外部失真响应的信号和噪声。具体地,可测量二进制单一量值伪噪声信号(其作为跟踪设备66的接收线圈处的电压来测量)并且计算其逆。然后,均衡将所确定的逆与在跟踪设备66(即,跟踪设备66中的线圈)处接收的信号进行卷积,以移除定位器94和跟踪设备66以及与其相关联的硬件的影响,从而留下来自控制器110的驱动信号和场中的噪声或外部失真。
92.通过确定系数来执行均衡。具体地,算法可用于确定测试或校准均衡确定中的系数。均衡可以任何适当的方式执行,包括本领域技术人员通常理解的那些。例如,优化和组合有限脉冲响应(fir)滤波器和双向无限脉冲响应(iir)滤波器可用于均衡信道。所确定的系数可用于移除定位器线圈200和跟踪设备66的任何线圈之间的均衡中的硬件失真。
93.因此,均衡框324可用于生成或确定没有失真的信号,这是由于定位器94的硬件经由线圈200发射并且被接收在跟踪设备66和其中包括的线圈处。因此,已均衡信号可用于确定由定位器94生成的场中的跟踪设备的姿势。如上所讨论,定位器94可根据bno方案发射信号,其中每个线圈200在pn序列中从另一个线圈偏移约1023位。
94.在各种实施方案中,如上简要所述,导航系统26的选定子信道或子部分可被校准和均衡。例如,参考图5a和图5b,发射器或定位器94和/或接收器或跟踪设备66中的每一者的/通向其的相应子信道可被单独校准和均衡。这可作为校准和均衡整个系统的补充和/或替代并且结束,如上所讨论并且在图4a和图4b中示出。
95.首先参考图5a,示出用于校准和均衡的方法300a。方法300a可包括与上文在方法300中讨论的那些类似的部分,并且相似的附图标记将用小写字母“a”增强。因此,方法300a可开始于框310a。然后,过程300a可移动到框311a以通过控制器(诸如控制器110)生成信号。所生成的信号可包括pn序列,如上所讨论。因此,在框311a中的在控制器处生成信号类似于如上所讨论的在框311中的信号的生成。信号的生成和控制器311a然后可被发送通过和/或发送到导航系统26的各种部件,包括如上所讨论的那些。
96.可在框326(示意性地被示为线326')中将校准信号发送到定位器。信号可被发送到从控制器110到定位器94的各种部件,包括各种电路和滤波器、发射器线圈(例如,线圈200),以及控制器110和定位器94之间的其他部件和/或包括定位器94。发送到定位器94的信号然后可在穿过导航系统26的定位器部分的所有部件之后发射回控制器110。因此,控制器110可接收从定位器部件返回的信号,诸如从线圈发射和/或通过返回线返回到控制器110(在穿过定位器94部分的所有部件之后)。
97.控制器110还可将信号发射到接收线圈,诸如跟踪设备66和/或校准接收器95(在本文中也称为接收器)。发射到接收器66的信号可与发射到定位器94的信号基本上相同。此外,可基本上同时和/或顺序地发射信号。因此,从控制器110生成的信号也可被发射到接收器66,诸如通过其所有部件,包括接收器电路和/或滤波器、(例如,跟踪设备66的)传感器接收线圈(包括其选定或适当的部件的全部)。信号然后可在已经穿过所有部件之后返回到控制器110,诸如控制器110从接收器66接收返回信号。
98.因此,框326和328两者可包括两个部件,包括来自包括定位器和接收器的相应部件的发射和返回信号。换句话说,信号可从控制器110发送并且返回到控制器110以用于校准和均衡。因此,不是仅或要求信号被发射到定位器94,然后由接收器66发射和接收,并且然后发射回控制器110,信号可从单独部件中的每一者发送和返回作为单独的子信道校准和均衡。
99.返回信号然后可由控制器110或适当处理器系统进一步处理,如上文所讨论。可以与上文所讨论的方式类似的方式在框322a中进行校准。校准可包括各种校准技术或测量,类似于上文所讨论的那些。例如,校准可包括诸如通过选定磁力计和/或如先前由定位器94和/或接收器66中的相应线圈表征的场的测量。校准信号和/或信息然后可用于框324a中的均衡。同样,框324a中的均衡可包括如上针对导航系统26中的信号的均衡所讨论的均衡。
100.因此,导航系统26的校准和均衡可包括如上文所讨论并且如图5a和图5b中示例性示出的单独或子信道校准和均衡部分和/或步骤。
101.另外和/或另选的子信道校准和均衡可包括如图6a和图6b所示的方法。最初,方法300b可包括与方法300和方法300a类似的步骤或部分,如上所讨论。相似部分将通过用“b”增强的相似数字来引用。因此,方法300b可在开始框310b中开始并且包括框311b中的在控制器处的信号的生成。在控制器处的信号的生成可与如上所讨论的在控制器100处的信号的生成类似或相同。
102.信号可以是pn序列并且然后可被发射或发送到导航系统26的各个部件。例如,信号可通过定位器系统的各个部件(包括电路、滤波器、发射器线圈等)发送到定位器94。在框326b中的向定位器94发送信号以及信号返回到控制器可类似于如上文在框326中所讨论的那种。发送到定位器94的信号可通过定位器的各种电路从控制器110发送到定位器94。如以上和本文进一步讨论的,返回到控制器110以用于各种校准和均衡的返回信号可以各种选定方式返回。如上所讨论,信号可通过从定位器94到控制器110的各种返回路径来发送或返回到控制器。除此之外或另选地,各种外部部件可从定位器94接收发射信号,诸如磁力计等,并且来自外部部件的信号可返回到控制器。然而,信号不需要被无线发射。已经穿过各种部件(诸如定位器94的电路、滤波器和线圈)之后的信号可具有然后返回到控制器110的信号。
103.另外,所生成的信号可被发射到接收66信道的各种电路和部件,如图6b所示。例如,接收线圈电路66'/95'可包括与跟踪设备66和/或校准线圈95相关联的各种电路、电缆、滤波器等。接收线圈电路66'/95'可包括通常被理解为与导航系统26固定的各种硬件或部件。例如,如上所讨论,控制器110可连接到各种跟踪设备和/或从各种选定跟踪设备(诸如跟踪设备66)接收跟踪设备信息。除此之外和/或另选地,各种其他跟踪设备(诸如跟踪设备62)也可连接到控制器110。
104.在选定规程期间,例如,跟踪设备线圈或部件66、95可与接收器电子器件66'/95'互换并且因此连接到控制器110。此外,如本领域技术人员所理解的,在选定规程或多个规程期间,可单独和独立地跟踪多于一个器械。因此,可单独和独立地跟踪多个跟踪设备66。因此,在选定时间,可输入选定和附接的跟踪设备66的身份。因此,系统(诸如控制器110)可从存储系统调用选定和输入的跟踪设备66的表征。因此,接收电路66'/95'的子部件校准和均衡可允许独立于其中跟踪的单独部件的导航系统26的校准,诸如通过跟踪设备66。
105.鉴于上述情况,在框330中,可将来自框311b的所生成的信号发射到接收电路。从接收电路66'/95'接收的信号可以任何适当的方式接收,诸如在返回信号中和/或从外部部件接收,包括来自外部多量计的电压测量,或其他适当的传感器。
106.因此,导航系统26的校准和均衡还可因此包括调用选定接收器(也称为接收器线圈或部件)的表征。例如,如上文所讨论,各种部件可与导航系统26互连以用于选定部件的导航。因此,导航系统26可在没有特定和选定的跟踪设备66的情况下被校准和均衡。在选定时间期间(诸如在规程期间),当选择特定跟踪设备时,选定跟踪设备的身份可被输入(例如,由使用者72手动地输入,通过感测或接收来自跟踪设备的信号自动地输入、或其他适当机制)。导航系统26可调用选定跟踪设备的先前已做出和预定的表征(包括均衡)。因此,跟踪设备的表征可在任何先前时间完成。表征可包括校准和均衡信息,该校准和均衡信息可在先前确定并存储在选定存储器中,诸如在数据库中和/或在包括工作站98或处理器系统98的导航系统26的存储器中。
107.可调用先前确定的表征(诸如手动地和/或自动地和/或其组合)以完成整个导航系统26(包括选定特定接收线圈66/95)的校准和均衡。因此,当选择了选定接收器时,调用的表征可被合并和/或与框330中的来自接收电路的接收信号以及框326b中的来自定位器的接收信号一起使用以用于校准和均衡。因此,通过来自框322的调用的表征,校准可在框322b中进行。在框322b中的校准之后,可在框324b中进行均衡。校准和均衡可包括此类规程,如上文所讨论。
108.因此,导航系统26的校准和均衡可以适当的方式进行,包括上文所讨论的那些,诸如图4a至图6b所述和示出。应当理解,导航系统26的校准和均衡可以任何适当的方式进行并且可包括上述系统或方法和/或其组合中的任一者。例如,校准和均衡的端到端完成可根据方法300进行。另外,在选定规程期间,校准方法300b可用于在选定规程期间和/或规程之间添加和/或改变跟踪设备时增强和/或更新导航系统26的校准均衡。因此,应当理解,校准和均衡可以任何适当的方式进行,并且不必仅限于如上所讨论的方法中的单个方法,但可包括多种方法和/或其组合,诸如根据方法300的端到端校准和均衡,其可根据子信道规程(根据方法300a和300b中的任一者和/或两者)来补充和/或重新完成。
109.根据各种实施方案(包括上文所讨论的那些),在步骤324中,根据上文所讨论的均
衡过程,可通过均衡器190均衡在跟踪设备66处接收的信号。参考图7,非均衡脉冲响应可包括因果部分340和反因果部分344。反因果部分可用于补偿导航系统26的各种部件并且可鉴于其而变化。因此,各种不同的部件可在导航系统26中使用并且允许或致使因果部分340变化。因果部分340可用于补偿系统的通带中以及还有定位器94的电路的各种部件中的变化和相位。因此,框324中的均衡信号可使用如图7所示的预均衡脉冲响应以校准和均衡信号。
110.定位器94可发射信号以生成电磁场。信号可以是通过bno方案发射的扩散频谱信号。信号(包括bno方案)可被称为包括二进制信号的跟踪信号。可在涉及发射信号的跟踪设备66处测量二进制信号。如本文进一步讨论的,接收信号可包括各种分量,这是由于如以上以及还有本文中讨论的各种失真。均衡可辅助确保由定位器94发射的脉冲响应的恢复。
111.转向参考图8和图9,预均衡信号在图8中被示为由跟踪设备66接收。图8中的预均衡信号示出了由于系统失真而引起并且包括导致场中或跟踪设备66的路径附近的材料的失真的不同接收信号。例如,曲线图线350涉及没有失真物品情况下的由跟踪设备66接收的预均衡信号的随时间推移的值。第二曲线图线354示出了当铝的一部分被放置或定位在接收信号附近或引起接收信号中的失真时的随时间推移的接收信号。第三曲线图线358示出了当选定钢材料定位在跟踪设备66附近时的接收信号。如图8中由曲线图线350-358所示,由跟踪设备66接收的信号可取决于定位在跟踪设备66附近和/或将使由定位器94发射的信号失真的材料而变化。如本文进一步讨论,可通过分析接收信号以确定是否存在失真并且如果存在的话则移除该失真来移除由选定材料引起的失真。如本文所讨论,可确定失真,无论是否存在。如果确定存在失真,则可移除该失真以允许恢复包括脉冲响应的未失真跟踪信号。
112.参考图9,示出了导航370的方法或过程。导航过程可在开始框374处开始并且包括在框378中发射一个或多个信号。如上所讨论,所发射的信号可包括根据如上所讨论的bno方案的扩散频谱信号。由定位器94发射的信号可被发射到导航体积180中。如上所讨论,发射信号可生成波长大于或等于10米的近场磁场。导航体积180可取决于各种因素,诸如线圈200的大小、定位器94的总体大小、电力传输和其他因素。然而,导航体积180可以是约0.001m3至约1m3,包括约0.01m3至约0.5m3的体积。
113.在框382中,跟踪设备66可接收一个或多个发射信号。在框382中的接收信号可由跟踪设备66接收和/或发射到导航处理器102。应当理解,方法或过程370可由处理器102执行,其中发射信号378可以是到定位器94以发射信号的信号,并且可在框382中接收信号,可以是从跟踪设备66接收并发射到导航处理器102的信号。方法370可包括由定位器94发射信号并且由跟踪设备66接收信号,或反之亦然,并且导航处理器102可执行指令以进行方法370中的导航的确定。
114.在框382中接收到一个或多个信号之后,可在框386中处理信号,诸如解复用和均衡。如上文所讨论,接收信号通过bno方案来接收,并且因此每个循环移位或偏移的代码(对应于每个发射线圈)可从接收信号解复用以用于进一步分析。框386中的均衡可类似于均衡框324,如上所讨论。通常,如上所讨论,定位器94可包括线圈200a并且跟踪设备66可包括线圈66a。应当理解,本文对线圈66a的讨论可包括或类似于跟踪设备66处的多个线圈的讨论,并且本文的单个线圈66a的讨论仅是示例性的。线圈66a和线圈200a之间的均衡可允许发射信号的脉冲响应恢复。
115.在框386中的对信号进行均衡(如上文所讨论的诸如通过均衡器190)之后,可评估已均衡信号以允许在框390中确定是否存在失真。可基于接收信号来进行是否存在失真的确定,例如如图10所示。如图10所示,接收信号可包括初始脉冲的确定或评估,如由图10的曲线图中的黑点394所示。脉冲响应可以是如在框386中均衡的来自接收信号的均衡脉冲响应。脉冲响应还可包括残余或尾部,该残余或尾部为可包括一个或多个尾部信号或点398的非脉冲或失真部分。尾部点398可包括尾部部分402中的多个尾部点。尾部部分402或尾部部分的存在可用于确定是否存在失真。因此,如果包括如图10所示的脉冲响应的信号基本上不包括尾部(如随时间推移绘制的那样),则确定无失真并且遵循无失真路径410。如上根据各种方法中的一个或多个方法所讨论的,校准和均衡可包括系统的包括本底噪声和失真极限的表征。尾部(即失真)的不存在可被定义为在这些先前确定的限制内。
116.如果在均衡之后在接收信号中未发现失真,诸如确定信号中不存在尾部402,并且遵循无失真路径410,则可执行跟踪设备66的导航而不校正失真。如上所讨论,由于信号路径中的各种失真物品(诸如影响由定位器94发射的信号),因此可在接收信号中存在或发现失真。失真可能是由各种物品(诸如导航系统26中或附近的物品)引起的,如上所讨论,包括成像设备80、器械68、手术台或患者支撑台104、或其他物品。另外,由于其他物品主动地发射场(诸如来自电动钻头、定位器94中的除正在一次被解析或评估的对之外的其他线圈或其他物品的电场),因此可发生失真。可在成对(例如,定位器94的单个线圈200a和跟踪设备66的单个线圈66a)基础上进行均衡。因此,跟踪设备66的确定姿势可通过针对定位器94的线圈200a-200n中的每一者确定跟踪设备66的线圈66a-66c中的每一者的姿势来进行。然而,应当理解,通过跟踪设备66的器械68的跟踪可包括在定位器和跟踪设备66的选定数量的线圈之间的导航。因此,例如,导航可通过一个跟踪设备以及使用定位器94中的九个或十二个发射线圈来进行。其他示例可包括使用五个发射线圈的一个接收线圈到使用三个发射线圈的三个接收线圈到使用一个发射线圈的十二个接收线圈的组合。
117.在确定没有失真之后,可在框414中进行对于某些度量是否被接受的评估。度量可包括信号度量或任何其他适当的度量。可产生度量的另外预定可接受范围或阈值并且将其保存以供导航处理器102访问。在各种示例中,可确定高于或低于阈值的预定信号强度值。因此,如果所接收的信号高于阈值,则可确定跟踪设备太靠近定位器,并且如果所接收的信号低于阈值,则跟踪设备可能太远离定位器。然而,阈值可涉及定位器大小和/或电力、跟踪设备配置等。因此,可在框414中分析和确定度量。
118.如果在框414中确定度量不是可接受的,则可遵循返回或循环路径418以便在框378中发射信号和/或再次在框382中接收信号。在各种实施方案中,发射可自动重复,因此循环到发射可能不是必需的或期望的,并且循环到在框382中的接收可以是适当的。通过再次在跟踪设备66处接收信号,可重新分析信号。发射信号可在选定时间跨度内发射,诸如毫秒,包括1至100毫秒的序列,包括后面可能有或没有的发射中的打断或暂停的约30毫秒。因此,在框414中确定度量是否为可接受的,如果未发现为可接受的,则可允许在框382中再次接收信号,但在使用者72可接受的时间中不干扰导航系统26的导航。然而,如果在合理时间段(诸如约30至500毫秒)内未发现度量可接受,则导航系统26可提供输出(诸如通过显示设备84),其可向使用者72识别错误已经出现并且必须被解决。
119.如果在框414中,度量是可接受的,则可遵循“是”或解决路径422。解决路径422可
通向框428中的导航解决或姿势确定。框428中的导航解决可允许在显示设备上相对于显示设备84上的图像数据108示出表示68i。导航解决允许示出和/或确定跟踪设备66相对于对象30的姿势。因此,可进行器械68相对于对象30的导航。
120.继续参考图9,如果在框390中发现存在失真,则导航方法370还可遵循失真确定或失真发现路径440。“是”失真路径440可通向或进入失真校正(也称为移除)子例程460。如本文所讨论,子例程460可包括用于识别和校正选定失真的各种规程或过程。在子例程中,本领域技术人员应当理解,本文所描述的过程可顺序地和/或同时进行,如本文所讨论。因此,虽然图9示出了以选定顺序的子例程,但子例程460中的过程可基本上同时进行。
121.失真原因可以是任何失真原因,包括上文所讨论的那些。例如,导电的金属对象可在由定位器94生成的场的路径中。例如,如图1所示,铝对象(诸如可由其形成的托盘71)可在信号从定位器94到跟踪设备66的路径中。铝托盘71可导致尾部402,如图10所示。尾部402可包括如沿着图10中的x轴所示的按时间分开的多个响应数据点。如图10中示例性所示,时间可按微秒的增量分离,但也可以是任何适当的时间分割。然而,尾部402的确定和识别可用于确保或确定初始脉冲394的适当量值。
122.通常,当在框382中接收信号时,初始脉冲394在时间“零”出现。具体地,在框378中发射信号并且在框382中接收信号,并且在框382中的信号的接收将是时间零,其也被理解为pn代码或pn代码的信号或移位的开始。在此之后的任何尾部或残余的接收信号可能是由于沿信号路径的场内的失真对象(诸如托盘71)引起的。因此,初始脉冲394可失真(诸如在量值方面)并且由失真尾部402指出的这种失真。
123.继续参考图10,可在曲线图上示出初始脉冲394以便于讨论和计算,如本文所讨论。初始脉冲394以零时间响应示出以示例性地示出x轴上的时间零处的初始脉冲。另外,初始脉冲以零量值示出以更好地示出在框382中接收的残余或尾部响应的值(如果存在失真)。初始脉冲394的已校正或非失真尺寸可通过计算进入初始脉冲394的尾部402来确定。初始脉冲和尾部通常可以是因果响应,其中尾部402可用于确定预期或未失真的脉冲量值。
124.失真存在路径440可首先转到框444中的残余或尾部分离。残余分离可包括确定所有尾部部分的确定。如上所讨论,可诸如基于分别在框378、382中的发射信号与接收信号之间的确定或选定的时间量来确定时间零处的初始脉冲。例如,可确定从定位器94发射信号与在跟踪设备66处接收信号之间的时间可远小于微秒。因此,导航系统26可确定在框378中的信号的发射之后的选定时间量处接收信号可以是零时间和初始脉冲。在此之后,任何恢复的脉冲响应可被确定为尾部402。然而,尾部402的确定可以任何适当的方式,诸如在所识别的初始脉冲之后的任何恢复信号。无论如何,当确定是否存在失真时可在框390中确定或检测的尾部402可与初始脉冲或第一脉冲394分离。残余的分离提供了尾部尺寸或量值的分离以用于进一步重建。
125.在框444中的尾部的分离之后,可在框448中执行重建。重建框448可包括失真脉冲响应的重建。如上所讨论,初始或零时间脉冲394可为失真的,并且此失真可由尾部402确定(如果存在的话)。因此,一旦尾部在框444中被分离,就可将已分离的尾部重建成失真初始脉冲以确定实际或已校正的脉冲。重建可以是以任何适当类型的重建。
126.例如,直接重建可通过将选定时间量(诸如约1至10毫秒,包括5毫秒)的尾部402的值添加到失真初始或零时间脉冲的值来包括添加(addition或additive)重建。直接重建可
允许失真脉冲的快速重建并且可适用于选定材料,诸如导电材料(诸如某些塑料或聚合物、金属合金等)。
127.重建还可包括脉冲响应的建模重建,该建模重建可基于对尾部的某些部分进行加权、添加或消除尾部402的某些部分、或其他适当的建模技术。在各种实施方案中,重建可不包括首先在框444中移除尾部,而是可包括同时分离和建模。在各种实施方案中,可对尾部求和并且将其添加到脉冲中,特别是对于导电失真材料。换句话说,作为残余的函数,在直接计算中,对残余进行求和以确定失真初始脉冲。在建模或间接计算中,尾部可被分解成单独函数并且然后进行拟合以用于确定失真效应。例如,分解函数可被拟合至预定或测量的失真材料或物品。换句话说,残余可通过参数化脉冲响应(具有导电以及导电和磁性贡献)的组合和/或通过测量脉冲响应(包括预期的导电以及导电和磁性贡献)的组合来建模。
128.可在框448中进行重建以在框454中确定已校正或未失真的脉冲响应。在框448中的失真脉冲响应的重建之后,在框454中进行脉冲响应的移除或去卷积。在框454中的脉冲响应的移除或去卷积可包括经由移除或去卷积将失真脉冲响应与全脉冲响应分离以确定已校正或未失真的脉冲响应和脉冲。
129.在框454中的移除或去卷积之后,导航方法370然后可进入框414中的选定度量是否可接受的确定。与上文所讨论的那样类似,在框414中的度量是否可接受的确定可允许在循环路径418中接收附加信号和/或在框428中进行导航解决。
130.因此,方法370可遵循无失真路径410和/或失真路径440以解决导航并且确定跟踪设备66在空间中相对于对象30的姿势。方法370可包括无失真路径410和失真路径440,该失真路径可包括失真校正子例程460。失真校正子例程460可由控制器110或导航处理器102执行以允许移除或校正来自失真对象的失真以便确定跟踪设备66的真实或正确姿势。可在框390中检测失真并且在失真校正子例程460中移除失真,如上所讨论。
131.如上文简要讨论的,子例程460可以是基本上顺序的,如上所讨论。因此,可以如上所讨论并且在图9中直接示出的顺序处理各种计算(诸如通过处理器执行的指令)。然而,在各种实施方案中,子例程460中的所有过程可同时进行,或者可同时进行选定的多个过程。换句话说,子例程460可经由同时的分离444、重建448和移除或去卷积454进行。然而,子例程460仍然可遵循框390中的已恢复脉冲响应是否包括失真尾部的决定。然后,子例程460可包括来自已恢复脉冲响应的已重建失真脉冲响应的同时分离和去卷积以发现已校正脉冲响应和脉冲。已校正脉冲响应和脉冲可通过将残余拟合至已测量或建模的脉冲响应(包括预期的导电以及导电和磁性贡献)的组合来确定。
132.因此,如上所讨论,导航系统26可用于确定与器械68相关联(诸如连接到器械)的跟踪设备66的姿势。因此,导航系统26可跟踪该跟踪设备66并且导航器械68,诸如通过将器械68显示作为显示设备84上的表示68i。扩散频谱发射的使用可允许通过选定电子器件(诸如上文所讨论的“h”桥配置)的低功率和高保真信号发射。另外,选定方案(诸如bno方案)可允许基本上不含通过相对于跟踪设备66的外部信号引起的失真或混淆的信号的发射。另外,可分析或重建接收信号以确定失真是否存在或已由失真对象引起,并且如果存在的话,可将失真移除。因此,由于跟踪设备66处的接收信号,可通过选定的精确度和正确性来确定跟踪设备66的姿势。
133.出于说明和描述的目的,已经提供了对实施方案的前述描述。上述描述并不旨在
是详尽的或对本发明进行限制。特定实施方案的单独元件或特征通常不限于该特定实施方案,而是在适用的情况下,可互换并且也可以在选定实施方案中使用,即使未具体示出或描述。同一元件或特征可以多种方式变化。此类变型不会被视为脱离本发明,并且所有此类修改旨在包含于本发明的范围内。
134.应该理解,本文所公开的各个方面可以以不同的组合而非说明书和附图中具体呈现的组合而组合。还应该理解,取决于示例,本文描述的任何过程或方法的某些动作或事件可以不同的顺序执行,可以完全添加、合并或省略(例如,执行所述技术可能不需要所有描述的动作或事件)。另外,尽管为清楚起见,本公开的某些方面被描述为由单个模块或单元执行,应当理解,本公开的技术可以通过与例如医疗设备相关联的单元或模块的组合来执行。
135.在一个或多个示例中,描述的技术可在硬件、软件、固件或它们的任何组合中实现。如果在软件中实现,则功能可作为一个或多个指令或代码存储在计算机可读介质上并由基于硬件的处理单元执行。计算机可读介质可包括非暂态计算机可读介质,其对应于有形介质,诸如数据存储介质(例如,ram、rom、eeprom、闪存存储器,或可用于存储指令或数据结构形式的期望程序代码并且可由计算机访问的任何其他介质)。
136.指令可由一个或多个处理器执行,诸如一个或多个数字信号处理器(dsp)、通用微处理器、图形处理单元(gpu)、专用集成电路(asic)、现场可编程逻辑阵列(fpga)或其他等同的集成或离散逻辑电路。因此,如本文所用的术语“处理器”可指适于实现所描述技术的前述结构或任何其他物理结构中的任一者。另外,本技术可在一个或多个电路或逻辑元件中完全实现。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。