1.本实用新型涉及智能机器人技术领域,特别涉及一种防轴心磨损的复合机器人。
背景技术:
2.复合机器人一般是集移动和搬运功能为一体的智能机器人,其移动功能依托于行走机构,其搬运功能依托于机械手。如cn109202885a、cn113093741a、cn216192980u披露的各种复合机器人,其设计都比较关注的是通过视觉辨认来提升抓取精度的问题,但是在实际应用中还要考虑其他方面。
3.行走机构具有行走轮和驱动行走轮启停的马达或减速机。目前复合机器人在到达定位点取放货物时,主要是靠着马达的剎车来固定复合机器人的姿态的。因为机器手臂的动作带有离心力,让机器人本身有个旋转的向量,所以力量会反馈在减速机和马达的轴心上,在磨擦量的积累下,移动精度会变差而导致取放不准,轴心报废是最后的结果。
4.因此有必要改进复合机器人的结构来解决以上问题。
技术实现要素:
5.本实用新型的主要目的是为了提供一种防轴心磨损的复合机器人,能够在复合机器人到达位置时用地脚支撑地面,使机械臂转动的反作用力不会传递给行走轮的轴心,提高了重要零件的使用寿命。
6.本实用新型通过如下技术方案实现上述目的:
7.一种防轴心磨损的复合机器人,包括下部的行走机构和上部的机械臂,所述行走机构的下部设有与轴心连接的行走轮,所述行走机构底部还设有地脚组件,所述地脚组件包括升降驱动件、由所述升降驱动件控制向下伸缩的地脚以及位于所述地脚下部的接触传感器,所述接触传感器用以探测所述地脚接触地面以令机器人系统控制所述机械臂启动。
8.具体的,所述行走机构的底部左右对称的设有两个所述地脚组件,所述地脚为平行于对称面的条形结构。
9.进一步的,所述行走机构的两侧具有固定架,所述升降驱动件通过几字形的支架设置于所述行走机构上,所述支架具有中间的凹陷部和位于所述凹陷部两侧的两个平板部,所述升降驱动件嵌设于所述凹陷部内,所述平板部的侧方设有用来将其连接于所述固定架上的卡箍。
10.进一步的,所述地脚的两侧设有向上穿过所述平板部的导杆,所述平板部上设有匹配所述导杆的直线轴承。
11.本实用新型的有益效果在于:
12.本实用新型能够利用向下伸缩的地脚让复合机器人在到达取放位置后固定位置,接触传感器确认地脚撑地然后再控制机械臂动作,避免了机械臂活动产生的离心力传导到与行走轮连接的轴心,提高了零件使用寿命,而且避免了机械臂的移动速度过快而加重磨损问题,可减少工作时间,提升了复合机器人的效能。
附图说明
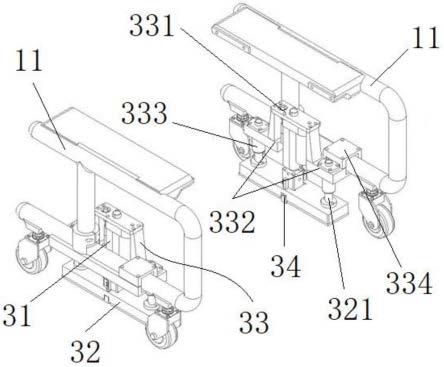
13.图1为实施例复合机器人的立体图;
14.图2为地脚组件的固定方式图。
15.图中数字表示:
16.1-行走机构,11-固定架;
17.2-机械臂;
18.3-地脚组件,31-升降驱动件,32-地脚,321-导杆,33-支架,331-凹陷部,332-平板部,333-直线轴承,334-卡箍,34-接触传感器。
具体实施方式
19.下面结合具体实施例对本实用新型作进一步详细说明。
20.实施例:
21.如图1和图2所示,本实用新型的一种防轴心磨损的复合机器人,一种防轴心磨损的复合机器人,包括下部的行走机构1和上部的机械臂2,行走机构1的下部设有与轴心(未露出)连接的行走轮(未露出),行走机构1底部还设有地脚组件3,地脚组件3包括升降驱动件31、由升降驱动件31控制向下伸缩的地脚32以及位于地脚32下部的接触传感器34,接触传感器34用以探测地脚32接触地面以令机器人系统控制机械臂2启动。本实用新型能够利用向下伸缩的地脚32让复合机器人在到达取放位置后固定位置,接触传感器35确认复合机器人升起然后再控制机械臂2动作,避免了机械臂2活动产生的离心力传导到与行走轮连接的轴心,提高了零件使用寿命,而且避免了机械臂2的移动速度过快而加重磨损问题,可减少工作时间,提升了复合机器人的效能。不同于工程车辆上为了防止翻倒而凸出设置于两侧的支撑脚结构,地脚组件3的首要目的是防止机械臂2运动的离心力传导到轴心,位置以靠近行走轮为宜,可以是一个,也可以是多个。
22.如图2所示,行走机构1的底部左右对称的设有两个地脚组件3,地脚32为平行于对称面的条形结构。两个地脚32各自与地面形成线形的接触面且两者平行,两个地脚32撑起时可以保持复合机器人的平衡,避免轻易翻倒的问题。
23.如图1和图2所示,行走机构1的两侧具有固定架11,升降驱动件31通过几字形的支架33设置于行走机构1上,支架33具有中间的凹陷部331和位于凹陷331部两侧的两个平板部332,升降驱动件31嵌设于凹陷部331内,平板部332的侧方设有用来将其连接于固定架11上的卡箍334。升降驱动件31可以为气缸、电缸等驱动部件,其位置必然位于地脚32的上方,而凹陷部331能够让升降驱动件3的位置可以高于支架33与固定架11的固定点,也即卡箍334的位置,使结构更加紧凑。卡箍334与平板部332能够将固定架11抱紧固定。但实际应用中,地脚组件3固定于行走机构1的下方不局限于这种方式。地脚亦可以设置在行走机构1内部的其他可利用空间。
24.如图2所示,地脚32的两侧设有向上穿过平板部的导杆321,平板部332上设有匹配导杆321的直线轴承333。平板部332还作为导杆321的引导结构,限制地脚32严格沿着上下方向移动。直线轴承333能降低摩擦阻力,使地脚32的伸缩动作顺畅。
25.以上所述的仅是本实用新型的一些实施方式。对于本领域的普通技术人员来说,在不脱离本实用新型创造构思的前提下,还可以做出若干变形和改进,这些都属于本实用
新型的保护范围。
技术特征:
1.一种防轴心磨损的复合机器人,包括下部的行走机构和上部的机械臂,所述行走机构的下部设有与轴心连接的行走轮,其特征在于:所述行走机构底部还设有地脚组件,所述地脚组件包括升降驱动件、由所述升降驱动件控制向下伸缩的地脚以及位于所述地脚下部的接触传感器,所述接触传感器用以探测所述地脚接触地面以令机器人系统控制所述机械臂启动。2.根据权利要求1所述的防轴心磨损的复合机器人,其特征在于:所述行走机构的底部左右对称的设有两个所述地脚组件,所述地脚为平行于对称面的条形结构。3.根据权利要求2所述的防轴心磨损的复合机器人,其特征在于:所述行走机构的两侧具有固定架,所述升降驱动件通过几字形的支架设置于所述行走机构上,所述支架具有中间的凹陷部和位于所述凹陷部两侧的两个平板部,所述升降驱动件嵌设于所述凹陷部内,所述平板部的侧方设有用来将其连接于所述固定架上的卡箍。4.根据权利要求3所述的防轴心磨损的复合机器人,其特征在于:所述地脚的两侧设有向上穿过所述平板部的导杆,所述平板部上设有匹配所述导杆的直线轴承。
技术总结
本实用新型属于智能机器人技术领域,特别涉及一种防轴心磨损的复合机器人,包括下部的行走机构和上部的机械臂,所述行走机构的下部设有与轴心连接的行走轮,所述行走机构底部还设有地脚组件,所述地脚组件包括升降驱动件、由所述升降驱动件控制向下伸缩的地脚以及位于所述地脚下部的接触传感器,所述接触传感器用以探测所述地脚接触地面以令机器人系统控制所述机械臂启动。本实用新型能够避免械臂活动产生的离心力传导到与行走轮连接的轴心,提高了零件使用寿命,而且避免了机械臂的移动速度过快而加重磨损问题,可减少工作时间,提升了复合机器人的效能。了复合机器人的效能。了复合机器人的效能。
技术研发人员:罗文保
受保护的技术使用者:友上智能科技(苏州)有限公司
技术研发日:2022.06.17
技术公布日:2022/12/2
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。