1.本发明涉及一种磁式编码器迷宫机器人,属于智能机器人领域。
背景技术:
2.迷宫机器人是利用单片机、微型电机及多种传感器组成的小型行走机器人。由于目前市面所出售的迷宫机器人体积偏大,而且并不便宜,大多选用价格偏高的零件与电机,因此制作的迷宫机器人成本进而提高,使得初学者制作上负担太大,以至于无法有效的积极推广。
技术实现要素:
3.针对现有技术的不足,本发明在迷宫机器人的低价直流电机上提供一种独立电机结构的磁式编码器装置。
4.本发明技术方案如下:
5.一种磁式编码器迷宫机器人,包括pcb底板和置于pcb底板上的磁式编码器、红外发射接收组件以及电机、电机支撑架和轮子。pcb底板和置于pcb底板上的磁式编码器、红外接收发射传感器以及电机、电机支撑架和轮子,其特征在于,所述pcb底板上设置有单片机、陀螺仪、电机驱动电路、供电电源电路,其中,所述单片机分别与陀螺仪、电机驱动电路、供电电源电路相连,所述陀螺仪分别与单片机和供电电源相连。所述置于pcb底板上的磁式编码器、红外接收发射传感器以及电机、电机支撑架和轮子,其中,所述磁式编码器分别与单片机和供电电源相连,所述红外发射接收电路分别与单片机和供电电源相连,所述电机与电机驱动电路相连,所述电机支撑架和pcb底板用螺丝固定起来,所述轮子与电机支撑架相连并且后面的两个轮子分别安装磁铁,所述编码器芯片与后面的两个轮子同心轴并且互相对称固定在pcb底板上,利用轮子转动在编码器芯片中产生正交的脉冲信号来判断迷宫机器人的速度和位置信息。
6.根据本发明,优选的,所述单片机为stm32f4系列单片机。
7.根据本发明,优选的,所述陀螺仪安装在pcb底板的中心位置,利用陀螺仪可以测量迷宫机器人在转弯过程中角度的大小。
8.根据本发明,优选的,所述红外发射接收组件分别安装在pcb底板正前方和斜45
°
的位置,并且在垂直红外发射管和接收管的位置安装红外遮光罩,减少外界光的干扰。
9.根据本发明,优选的,所述的电机是廉价的航模8520空心杯电机。
10.根据本发明,优选的,所述磁式编码器是由磁铁和编码器芯片as5040组成,磁铁在编码器芯片正前方旋转一圈,编码器芯片输出两路1024个脉冲信息,单片机根据编码器芯片两路的脉冲信号顺序判断电机的前进和后退。
11.根据本发明,优选的,所述电机支撑架是由轻质树脂材料打印而成,减轻迷宫机器人整体重量。
12.本发明的有益效果在于:
13.1.本发明在现有的迷宫机器人的基础上加装磁式编码器,可准确的将迷宫机器人速度测量出来,提升了电机编码器解析度并且降低了机器人的制作成本。
14.2.本发明在现有的迷宫机器人的基础上由原来的数字红外发射接收装置改为模拟红外发射接收装置,可使迷宫机器人准确的测量出到迷宫墙壁的距离,提高迷宫机器人的避障能力。
附图说明
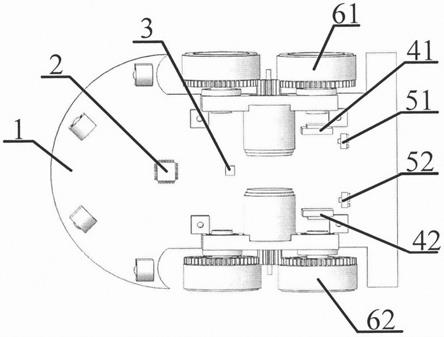
15.图1是本发明整体结构示意立体俯视图
16.图2是本发明整体结构示意立体侧视图
17.图3是本发明电机组件的结构示意立体图
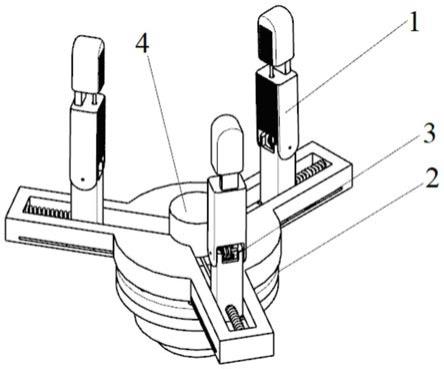
18.图4是本发明磁式编码器组件的结构示意立体图
19.图5是本发明红外发射接收组件的结构示意立体图
20.图6是本发明机械架组件的结构示意立体图
21.图7是本发明整体控制电路的结构示意图
22.其中:1为pcb底板;2为单片机;3为陀螺仪;41、42为磁式编码器组件,410为磁式编码器芯片,411为磁铁,51、52为电源芯片,61、62为轮子,611为齿轮,71为红外发射接收组件,81、82为电机支撑架组件,91、92为电机组件,913、923为电机,912为齿轮,911为电机轴。
具体实施方式
23.下边结合附图并通过具体实施方式来进一步说明本发明的技术方案。
24.请参照图1、图2所示,磁式编码器迷宫机器人包括pcb底板1、单片机2、陀螺仪3、磁式编码器组件41、42,电源芯片51、52,轮子61、62,红外发射接收组件71、电机支撑架组件81、82,电机组件91、92。所述单片机2用以控制电机组件91、92、陀螺仪3、红外发射接收组件71、磁式编码器组件41、42,电机组件91、92用以控制轮子61、62的运动方向,陀螺仪3用以测量行进中迷宫机器人的转弯角度,红外发射接收组件71用以检测迷宫墙壁的有无,电源芯片51用来对单片机2供电,电源芯片52对红外发射接收组件71、磁式编码器组件41、42进行供电,磁式编码器组件41、42用来获得并反馈电机组件91、92的速度和位置信息。
25.请参照图3所示,电机组件91包括电机913、齿轮912和电机轴911,齿轮912安装在电机913的电机轴912上。齿轮912的齿数14齿,厚度为0.5毫米,模数为0.5。电机组件92的组成和连接关系和电机组件91相同。
26.请参照图4所示,所述编码器组件41包括编码器芯片410、磁铁411,磁铁411安装在轮子61的凹槽内,编码器芯片410采用1024线的as5040芯片并且与磁铁保持1毫米的间隙平行安装在pcb底板1上。迷宫机器人行走过程中磁铁411会与轴承10吸附在一起,磁铁411与轮子61一起转动,编码器芯片410记录电机913的速度和位置信息,编码器组件42的组成和连接关系和编码器组件41相同。
27.请参照图5所示,所述红外发射接收组件71包括红外发射管711、红外接收管712、红外遮光罩713,其中正前方两组红外发射接收组件检测前方墙壁信息,斜45
°
两组红外发射接收组件检测左右侧墙壁信息,保证迷宫机器人行走在中间。
28.请参照图6所示,所述电机支撑架81、电机支撑架82安装在pcb底板1上,电机组件
91、轮子61、轴承10安装在电机支撑架81上,轮子61中心轴留有凹槽用来安装磁铁411,齿轮611为49齿,齿轮912为14齿,齿轮611模数0.5,齿轮912模数0.5,两齿轮中心距离15.75毫米。
29.请参照图7所示,所述单片机2与红外发射接收组件71、陀螺仪3和磁式编码器组件41连接,单片机2与电机驱动器22、电机驱动器23相连,电机驱动器22、23分别与电机913、电机923连接。
30.本发明的操作及运行过程如下:
31.直行前进:红外发射接收组件71检测到前方有路,根据存放在单片机2中的算法,控制电机913、电机923以相同速度向前运动,根据红外发射接收组件71检测迷宫两侧墙壁信息的距离,保证迷宫机器人行驶在迷宫中间。
32.向右转45
°
弯:红外发射接收组件71检测到右方有路,根据存放在单片机2中的算法,控制电机923向前加速运动,电机913向前减速运动,陀螺仪向右偏转的角速度积分出45
°
的角位移,迷宫机器人向右转。
33.向左转45
°
弯:红外发射接收组件71检测到左方有路,根据存放在单片机2中的算法控制电机923向前减速运动,电机913向前加速运动,陀螺仪向左偏转的角速度积分出45
°
的角位移,迷宫机器人向左转。
34.向后转180
°
弯:红外发射接收组件71检测到左方、右方、前方都没有路,根据存放在单片机2中的算法控制电机923向前转动,电机913向后转动,陀螺仪向后偏转的角速度积分出180
°
的角位移,迷宫机器人向后转弯。
35.磁式编码器采集数据:迷宫机器人行走过程中,磁铁跟随轮子转一圈,磁式编码器芯片410产生两路信号传入单片机2中,单片机2根据两路信号的顺序判断电机是正转还是反转,电机正转时单片机2中的计数器会上数,电机反转时单片机2中的计数器会下数。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。