1.本实用新型涉及全自动包馅类食品生产技术领域,尤其涉及一种全自动包馅类食品摆盘机用夹爪装置。
背景技术:
2.目前,许多家庭为了方便,都在外买速冻的饺子或包子等食品回家食用,现有的饺子或者包子等食品,已经具有全自动化的生产装置,但是在包装的时候,大多需要人工去将饺子或包子等料件摆放到托盘内,进而进行后续包装,全自动化的生产装置,每天生产的饺子或者包子等料件数量十分巨大,每台机器需要配备多人进行辅助包装,人工费用很高,工作效率低。
3.以自动饺子机为例,为了解决该技术问题,公开号为cn205525091u的《全自动摆盘机》,通过具有弧形凹面的装料爪和具有平直面的辅助挡板配合形成移料空间,将料件抓取离开移料皮带,之后将料件稳稳的摆放在摆盘的对应位置,实现料件在托盘内的摆放。
4.现有装置采用的装料爪在装料水平气缸的作用下水平移动,将料件抓取离开移料皮带,但是在实际生产过程中,从包制工位包制完成的饺子传输到摆盘机的过程中,由于出料工位相邻排的饺子间距大于装料盘的饺子间距,导致装料盘整体过宽,装料盘闲置空间过大;同时,饺子虽然采用自动化的生产,但是饺子的边有厚有薄,针对厚边的饺子,装料爪可能对其造成过度挤压,甚至夹破饺子,针对薄边的饺子,可能没夹住该饺子就进行下一步工序,导致后续饺子堵塞,影响整体生产节奏。
技术实现要素:
5.根据上述提出的技术问题,而提供一种全自动包馅类食品摆盘机用夹爪装置。本实用新型采用的技术手段如下:
6.一种全自动包馅类食品摆盘机用夹爪装置,包括夹爪框架和设置在其上的至少一列夹爪机构,所述夹爪机构包括若干第一夹片和第二夹片,第一夹片和第二夹片的至少一者为可动夹片,同一列的可动夹片均通过第一驱动机构进行驱动,第一驱动机构与可动夹片之间通过连杆机构相连,所述夹爪框架通过连接框架与转移装置相连。
7.进一步地,第一夹片和第二夹片的形状针对不同重量的包馅类食品边缘的形状进行设计。
8.进一步地,所述夹爪框架可移动地连接在连接框架上。
9.进一步地,所述夹爪机构为两列以上,所述连接框架上设置有第二驱动装置,所述连接框架上设有导杆,所述夹爪框架滑动连接在所述导杆上。
10.进一步地,其中一夹片为固定夹片,所述固定夹片固定安装在夹爪框架的底部。
11.进一步地,其中第一夹片为分瓣式夹片,在第一驱动机构驱动第一夹片夹片处于张开的状态下,各分瓣夹片与第二夹片之间的距离相同或不同。
12.本实用新型具有以下优点:本实用新型夹爪可分为单列夹爪和双列以上夹爪形
式,通过驱动安装在夹爪活动块上的连杆,使第一夹片与第二夹片实现闭合与打开状态,从而实现包馅类食品的夹取和松开,同步率高。双列以上夹爪中可设置收缩机构,通过第二驱动机构将抓取后包馅类食品的中心间距收缩至需求的间距,托盘可以合理的摆放更多包馅类食品,提高托盘利用率,且收缩间距可调整。活动夹片采用分瓣式结构,保证两瓣片分别承受不同的力,便于对上边部厚度一样的包馅类食品进行适应力的抓取,保证抓取精度,也能保证厚皮包馅类食品能够不被夹破,减少破损率。
附图说明
13.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
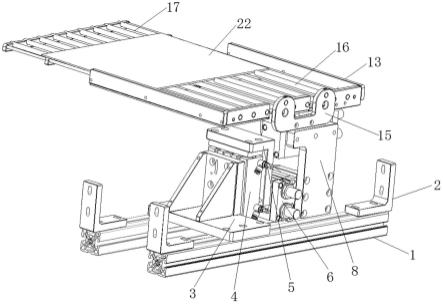
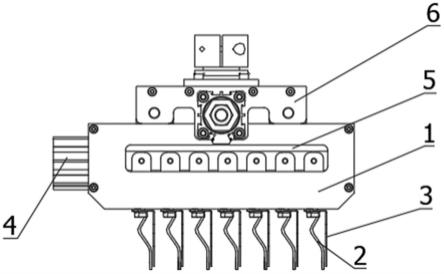
14.图1为本实用新型实施例1主视图。
15.图2为本实用新型实施例1侧视图。
16.图3为本实用新型实施例1张开状态的侧视图。
17.图4为本实用新型实施例2主视图。
18.图中:1、夹爪框架;2、第一夹片;3、第二夹片;4、第一驱动机构;5、连杆机构;6、连接框架;7、第二驱动装置;8、导杆。
具体实施方式
19.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.如图1~4所示,本实用新型实施例公开了一种全自动包馅类食品摆盘机用夹爪装置,包括夹爪框架和设置在其上的至少一列夹爪机构,所述夹爪机构包括若干第一夹片2和第二夹片3,第一夹片和第二夹片的至少一者为可动夹片,同一列的可动夹片均通过第一驱动机构4进行驱动,第一驱动机构与可动夹片之间通过连杆机构5相连,具体地,第一驱动机构的输出端与连杆机构相连,连杆机构通过若干转接杆与第一夹片的上端连接。所述夹爪框架1通过连接框架6与转移装置相连,本实施例中,所示转移装置为机械手,通过置于连接框架上方的法兰盘承接机器人的定位轴。作为其中一可选的实施方式,第一夹片为活动夹片,第二夹片固定夹片,所述固定夹片固定安装在夹爪框架的底部;或是第一夹片为固定夹片,第二夹片为活动夹片。作为另一种可选的实施方式,第一夹片和第二夹片均为活动式夹片。本实施例中,驱动机构可为气动、电动、机械驱动、液压驱动等任一种能够动力输出的装置。
21.第一夹片和第二夹片的形状针对不同重量的饺形进行设计。保证包馅类食品抓取稳定、不掉落、不粘连。所示第一夹片和第二夹片的厚度相同或不同,若不同,则固定片可谓薄片,活动片可为厚片。图示中活动片尾匹配包馅类食品上边部的预设形状,固定片为倒l
型片,在其它可选的实施方式中,第一夹片和第二夹片的形状可根据包馅类食品的具体样式进行适应性调整。
22.所述夹爪机构为两列以上,所述连接框架上设置有第二驱动装置7,所述连接框架上设有导杆8,所述夹爪框架滑动连接在所述导杆上。夹爪机构通过第二驱动装置调节所处的位置,以便于在抓取时,能够通过第一夹片和第二夹片精准夹取包馅类食品,双列以上夹爪中可设置此类收缩机构,目的是将抓取后包馅类食品的中心间距收缩至需求的间距,托盘可以合理的摆放更多包馅类食品,提高托盘利用率,且收缩间距可调整,在拜访后,夹爪所处位置回复原来的设定值。具体地,所述夹爪框架可移动地连接在连接框架上。
23.作为优选的实施方式,第一夹片为分瓣式夹片,在第一驱动机构驱动第一夹片夹片处于张开的状态下,各分瓣夹片与第二夹片之间的距离相同或不同。具体地,包馅类食品以饺子为例,此处所称的相同指的是,如果饺子为正常饺子,则其上边部的薄厚为预设值,则第一夹片的张开角度能够与饺子上边部相匹配,从而正常抓取饺子,此处所称的不同指的是,饺子在实际包的过程中,可能存在两片面皮粘连到上半部的情况,此时饺子的上边部一部分厚而另一部分可能是正常值,此时,分瓣夹片能够调节,保证两瓣片分别承受不同的力。
24.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。