1.本发明属于自动扶梯故障识别领域,特别是一种基于深度自编码器的自动扶梯故障识别与预警方法。
背景技术:
2.随着工业化水平的提高,自动扶梯在学校、商城、轨道交通等场所得到了广泛的应用。但是自动扶梯常安装在人流量较大的区域,而且平均每日运行时间长且载客量大,如果维护不及时将会提高自动扶梯出现故障的概率。
3.在传统检测方式基础上,将人工智能的理论和方法用于故障诊断,能从繁杂的设备运行数据中提取出更抽象、更深层次的特征,挖掘数据与设备部件故障之间的复杂联系。尤其是机器学习中深度学习、计算机视觉等多种工具已在机械设备故障识别中做出了突破性的成果,得到越来越多的领域的专家和研究者的关注。在自动扶梯故障诊断中,深度学习能够通过自主学习原始数据中有价值的特征,并摆脱其以往利用专家经验和人工进行特征提取的方式。因此,基于深度学习的故障检测技术应用于自动扶梯的故障检测的研究具有里程碑式的意义。发展智能化的诊断方向,是自动扶梯故障诊断方向崭新的途径。
技术实现要素:
4.本发明的目的在于提供一种基于深度自编码器的自动扶梯故障识别与预警方法,可以对自动扶梯进行故障识别,方便管理人员做出决策。
5.实现本发明目的的技术解决方案为:
6.一种基于深度自编码器的自动扶梯故障识别与预警方法,包括以下步骤:
7.步骤1、数据获取与预处理:通过振动传感器采集自动扶梯梯级与驱动装置的加速度数据,将原始数据通过滑动窗口聚合,并将小部分数据打上标签;将数据划分为训练集、测试集;
8.步骤2、基于深度自编码器的模型训练:基于深度自编码器的故障识别模型共由三部分组成,编码器、解码器与分类器;首先用编码器与解码器搭建模型,用无标签的训练集进行训练模型权重;基于该权重,然后用编码器与解码器搭建模型,用小部分有标签的训练集进行二次训练模型权重;训练完成后,保存模型;
9.步骤3、基于深度自编码器的模型测试:将待分析的自动扶梯运行数据输入到模型中,编码器将输出数据特征,编码器与分类器构成的模型将输出故障识别结果;
10.步骤4、基于t-sne算法的数据可视化:将模型提取的数据特征作为t-sne算法的输入,t-sne算法输出数据特征的二维或三维可视化结果。
11.本发明与现有技术相比,其显著优点是:
12.(1)本发明的基于深度自编码器的自动扶梯故障识别与预警方法,避免了传统识别方法模型建立困难、理解成本高的问题。
13.(2)本发明的基于深度自编码器的自动扶梯故障识别与预警方法,能使管理人员
快速掌握自动扶梯运行状态。
附图说明
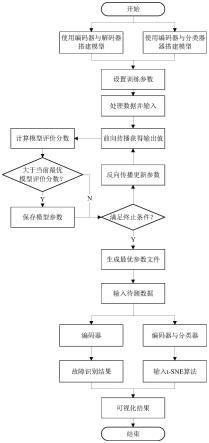
14.图1为一种基于深度自编码器的自动扶梯故障识别与预警方法流程图。
15.图2为基于深度自编码器的故障识别模型整体结构示意图。
具体实施方式
16.下面结合附图对本发明的具体实施方案进行进一步的说明。
17.附图1是一种基于深度自编码器的自动扶梯故障识别与预警方法流程图,本发明包括以下步骤:
18.步骤1、数据获取与预处理:通过ctc-ac102传感器采集自动扶梯梯级与驱动装置的加速度数据,首先在梯级无故障的情况下,在驱动主机上安装振动传感器,分别获取驱动主机无故障、驱动主机制动器不良与驱动电机故障时候的振动数据;其次在驱动主机无故障时,分别获取梯级无故障、梯级支架盖断裂、梯级滚轮损坏时的振动数据;并将原始数据通过滑动窗口聚合,窗口大小为48,滑动步长为32;并将小部分数据打上标签,标签包括驱动装置无故障、驱动装置制动器工作不良、驱动装置电机故障、梯级无故障、梯级支架盖断裂、梯级滚轮损坏,分别用0-5表示;最后将数据划分为训练集、测试集;
19.步骤2、基于深度自编码器的故障识别模型训练:附图2为基于深度自编码器的故障识别模型整体结构示意图,基于深度自编码器的故障识别模型共由三部分组成,编码器、解码器与分类器;首先用编码器与解码器搭建模型,用无标签的训练集进行训练模型权重;基于该权重,然后用编码器与解码器搭建模型,用小部分有标签的训练集进行二次训练模型权重;训练完成后,保存模型;
20.基于深度自编码器的故障识别模型参数见下表:
[0021][0022]
基于深度自编码器的故障识别模型网络结构见下表:
[0023][0024]
步骤3、基于深度自编码器的故障识别模型测试:将待分析的自动扶梯运行数据输
入到模型中,编码器将输出数据特征,编码器与分类器构成的模型将输出故障识别结果;故障识别结果通过混淆矩阵进行可视化,混淆矩阵是实现分类算法性能的有效可视化工具;并根据评价指标对模型识别效果进行评价,衡量模型常用的指标有准确率,精确率precision,召回率recall与f-score;其计算方式如下:
[0025][0026][0027][0028]
其中tpi表示数据属于第i类,模型将其分到第i类;fpi表示数据不属于第i类,模型将其分到i类;fni表示数据属于第i类,模型将其分到其他类。
[0029]
步骤4、基于t-sne算法的数据可视化:将模型提取的数据特征输入t-sne算法,t-sne算法输出数据特征的二维或三维可视化结果;数据初始维度为48,然后使用深度自编码器降维对数据进行初步降维,初步降维后数据维度为8;再使用t-sne算法将数据降至2维以可视化。
技术特征:
1.一种基于深度自编码器的自动扶梯故障识别与预警方法,其特征在于,包括以下步骤:步骤1、数据获取与预处理:通过振动传感器采集自动扶梯梯级与驱动装置的加速度数据,将原始数据通过滑动窗口聚合,并将小部分数据打上标签;将数据划分为训练集、测试集;步骤2、基于深度自编码器的模型训练:基于深度自编码器的故障识别模型共由三部分组成,编码器、解码器与分类器;首先用编码器与解码器搭建模型,用无标签的训练集进行训练模型权重;基于该权重,然后用编码器与解码器搭建模型,用小部分有标签的训练集进行二次训练模型权重;训练完成后,保存模型;步骤3、基于深度自编码器的模型测试:将待分析的自动扶梯运行数据输入到模型中,编码器将输出数据特征,编码器与分类器构成的模型将输出故障识别结果;步骤4、基于t-sne算法的数据可视化:将模型提取的数据特征作为t-sne算法的输入,t-sne算法输出数据特征的二维或三维可视化结果。2.根据权利要求1所述的基于深度自编码器的自动扶梯故障识别与预警方法,其特征在于,步骤1通过ctc-ac102传感器采集自动扶梯梯级与驱动装置的加速度数据,首先在梯级无故障的情况下,在驱动主机上安装振动传感器,分别获取驱动主机无故障、驱动主机制动器不良与驱动电机故障时候的振动数据;其次在驱动主机无故障时,分别获取梯级无故障、梯级支架盖断裂、梯级滚轮损坏时的振动数据;并将原始数据通过滑动窗口聚合,窗口大小为48,滑动步长为32;并将小部分数据打上标签,标签包括驱动装置无故障、驱动装置制动器工作不良、驱动装置电机故障、梯级无故障、梯级支架盖断裂、梯级滚轮损坏,分别用0-5表示;最后将数据划分为训练集、测试集。3.根据权利要求1所述的基于深度自编码器的自动扶梯故障识别与预警方法,其特征在于,步骤2基于深度自编码器的故障识别模型共由三部分组成,编码器、解码器与分类器;首先用编码器与解码器搭建模型,用无标签的训练集进行训练模型权重;基于该权重,然后用编码器与解码器搭建模型,用小部分有标签的训练集进行二次训练模型权重;训练完成后,保存模型。4.根据权利要求1所述的基于深度自编码器的自动扶梯故障识别与预警方法,其特征在于,步骤3将待分析的自动扶梯运行数据输入到模型中,编码器将输出数据特征,编码器与分类器构成的模型将输出故障识别结果;故障识别结果通过混淆矩阵进行可视化,混淆矩阵是实现分类算法性能的有效可视化工具;并根据评价指标对模型识别效果进行评价,衡量模型常用的指标有准确率,精确率precision,召回率recall与f-score;其计算方式如下:下:下:
其中tp
i
表示数据属于第i类,模型将其分到第i类;fp
i
表示数据不属于第i类,模型将其分到i类;fn
i
表示数据属于第i类,模型将其分到其他类。5.根据权利要求1所述的基于深度自编码器的自动扶梯故障识别与预警方法,其特征在于,步骤4将模型提取的数据特征输入t-sne算法,t-sne算法输出数据特征的二维或三维可视化结果;数据初始维度为48,然后使用深度自编码器降维对数据进行初步降维,初步降维后数据维度为8;再使用t-sne算法将数据降至2维以可视化。
技术总结
本发明提出了一种基于深度自编码器的自动扶梯故障识别与预警方法,具体方法包括通过振动传感器采集自动扶梯梯级与驱动装置的加速度数据,获取原始数据并打标签;将原始数据通过滑动窗口聚合;将聚合后的数据输入到深度自编码器中,模型将保存模型提取的数据特征,并输出故障识别结果。将模型提取的数据特征作为t-SNE算法的输入,t-SNE算法输出数据特征的二维或三维可视化结果。本方法可对自动扶梯故障进行诊断并将故障数据可视化。障进行诊断并将故障数据可视化。障进行诊断并将故障数据可视化。
技术研发人员:陈坚豪 张壮壮 童一飞 杨开伟
受保护的技术使用者:南京理工大学
技术研发日:2022.07.26
技术公布日:2022/12/1
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。