1.本发明涉及物料分拣设备,具体而言,涉及一种能够在进行分拣小型、薄片式、不同形状的物料分拣系统。
背景技术:
2.自动分拣机是按照预先设定的计算机指令对物品进行分拣,并将分检出的物品送达指定位置的机械。而今薄片式物料分拣机是针对薄片物料进行分拣的设备,而现今一客户的物料为薄片式,且分为三角形、半圆形/圆形、矩形多种混合型物料(例如学生用套尺,包括三角尺、矩形直尺以及半圆形的量角器尺)。目前市场上的分拣设备所针对的分拣对象大多数为大中型物件,然而针对轻薄件如薄片零件,小型物件等的分拣设备则很少。
3.现有分拣机一般包括三部分,沿输送方向依次布设的物料上料部分、分拣部分和收集部分,物料上料部分针对小型物件采用振动筛上料方式进行,而振动筛的上料方式如果应用于上述客户所采用的薄片零件物料时,容易出现物料在落至输送带上时出现堆叠,如果出现堆叠现象则在分拣部分的工位处大概率出现分选差错;分选出现差错势必会对后期收集部分工作带来不可避免的麻烦。
技术实现要素:
4.基于此,为了解决的问题本发明提供了一种能够在进行分拣小型、薄片式、不同形状的物料分拣系统,消除薄片式物料出现叠加导致分拣出错的问题发生,其具体技术方案如下:
5.一种物料分拣系统,包括输送带,输送带沿长度方向依次布设有物料导入机构、物料调距机构以及分拣机构,物料导入机构包括安装于输送带上方的平摊单元以及安装于输送带两侧的导向板,平摊单元包括安装在输送带顶侧的安装架,安装架上安装有固定设置的驱动组件以及相对安装架滑动配合的盛放架,驱动组件的输出端与盛放架固定安装,盛放架的底部与输送带之间间距为工件的厚度,物料调距机构安装于导向板的一侧用于调整工件后续输送的间距,分拣机构设置于输送带的末端用于分拣出不同类型的工件。
6.上述分拣系统,通过设置物料导入机构可以将物料以统一“躺平”姿态向后输送,防止其物料刮伤输送带;通过设置物料调距机构可以将调整完成后的物料等间距向后输送,防止在后侧出现拥堵,不会使得分拣机构过于集中工作或松散工作;通过分拣机构将调距处理完成后的物料进行高效分拣;其中物料导入机构采用驱动组件、盛放架以及导向板、安装架的设计结构,能够将盛放架内部出料在驱动组件间接作用下使得其实现“躺平”姿态,消除物料出现叠加导致分拣出错的问题发生。
7.进一步地,所述物料调距机构包括安装在导向板侧壁底部的固定板,固定板上安装驱动电机,驱动电机的输出端固定安装有一驱动盘,驱动盘外周面上安装有凸起部,固定板上转动安装有限位爪,限位爪上设置有作用部,该作用部在凸起部作用下向外侧弹开,限位爪和固定板之间连接有复位弹簧,固定板上设置有调距组件。
8.进一步地,所述调距组件包括转动安装在固定板上的调节盘,调节盘上周向等间距设置有限位结构,限位结构与限位爪相适配,调节盘的顶部固定安装有调节件,调节件为多个周向等间距分布的限位杆。
9.进一步地,所述盛放架的内部设置盛放斗,盛放斗的底部一侧设置有弹性开放口,盛放斗的顶部设置有送料组件,盛放斗的弹性开放口的底部设置有呈上下交错分布的多个姿态调整弧板。经过盛放斗内部的送料组件将内部的物料通过弹性开放口进行下放,通过设置其姿态调整弧板可以将从弹性开放口处排出的物料姿态进行有效地调整。
10.进一步地,所述弹性开放口包括转动安装在盛放斗侧部的挡板,挡板的侧部设置有沿盛放斗侧部转动设置的侧板,侧板和盛放斗的侧部通过弹性伸缩件连接。通过送料组件的施压作用,经过顶部的物料向下顶开挡板,物料得到下放处理,通过其送料组件的施压作用消除后,侧板和挡板会在弹性伸缩件的作用下自动复位至初始状态。
11.进一步地,所述送料组件包括安装在盛放斗顶部的驱动气缸,驱动气缸的输出端安装有下推板,下推板滑动安装在盛放斗的内侧顶部,盛放斗的内侧顶部安装有导向架,下推板包括固定部和活动部,固定部与驱动气缸的输出端连接,活动部安装在固定部的一侧且与固定部通过弹簧连接。通过驱动气缸带动下推板下移,经过下推板的下移使得其物料得到有效地下放处理,下推板采用活动部和固定部处理,使得其下推板在下推物料时,即使物料出现倾斜状态,出现倾斜状态的物料如果全部在挡板的正上方,则不会出现卡死现象,如果一部分位于挡板的正上方、另一部部分仍然处于盛放斗底板的正上方时,采用该种方案则不会影响其余物料的下放处理,如果没有该种结构设计则会出现卡死现象。
12.进一步地,所述盛放斗内部设置有顶推组件,顶推组件包括横向滑动安装在盛放斗内侧的顶推板,顶推板背对工件的一侧设置有顶推件。通过顶推件的顶推板进行将物料进行顶推处理,可以将盛放斗内部的物料进行规整,使得下推板下推的物料处于竖直状态,利于下放处理。
13.进一步地,所述姿态调整弧板上的调整面上设置有若干个等间距分布的姿态调整阶梯。通过姿态调整阶梯可以将下放的物料进行毫无先后顺序的调整其姿态,最终使得物料落在输送带上时处于“躺平”状态。
14.进一步地,所述驱动组件包括固定安装在安装架上的平摊气缸或固定安装在安装架上的驱动器,驱动器经传动机构与盛放架连接,传动机构包括齿轮齿条机构、曲柄滑块机构或丝杠螺母机构中的一种。
15.进一步地,所述分拣机构包括安装在输送带末端的openmv图像识别模块和以及独立在输送带末端后侧的分拣平台,分拣平台上转动安装有分拣转台,分拣转台的驱动装置设置于分拣平台内部,分拣转台上周向等间距分布有多个分拣区域,分拣区域处安装有分拣输送带。
16.本发明相较于传统技术,具备以下优势:
17.该物料分拣系统通过设置物料导入机构可以将物料以统一“躺平”姿态向后输送,防止其物料刮伤输送带;通过设置物料调距机构可以将调整完成后的物料等间距向后输送,防止在后侧出现拥堵,不利于物料的分拣处理;通过分拣机构将调距处理完成后的物料进行高效分拣;其中物料导入机构采用驱动组件、盛放架以及导向板、安装架的设计结构,能够将盛放架内部出料在驱动组件间接作用下使得其实现“躺平”姿态,消除物料出现叠加
导致分拣出错的问题发生。
附图说明
18.从以下结合附图的描述可以进一步理解本发明。图中的部件不一定按比例绘制,而是将重点放在示出实施例的原理上。在不同的视图中,相同的附图标记指定对应的部分。
19.图1是本发明一实施例的整体结构示意图;
20.图2是本发明一实施例所述的盛放架的结构示意图;
21.图3是本发明一实施例所述的盛放架的内部结构示意图;
22.图4是本发明另一实施例所述的盛放斗的整体结构示意图;
23.图5是本发明另一实施例所述的固定板底部平面视图;
24.图6是本发明另一实施例所述的openmv图像识别模块的原理图。
25.附图标记说明:
26.10-输送带;
27.20-物料导入机构,21-导向板,22-安装架,23-盛放架,231-盛放斗,232-姿态调整弧板,233-挡板,234-侧板,235-弹性伸缩件,236-驱动气缸,237-下推板,2371-固定部;2372-活动部,238-导向架,239-顶推板,2310-顶推件;
28.30-物料调距机构;31-固定板,32-电机,33-驱动盘,331-凸起部,34-限位爪,35-复位弹簧,36-调节盘,37-调节件,
29.40-分拣机构,41-openmv图像识别模块,42-分拣平台,43-分拣转台,44-分拣输送带。
具体实施方式
30.为了使得本发明的目的、技术方案及优点更加清楚明白,以下结合其实施例,对本发明进行进一步详细说明。应当理解的是,此处所描述的具体实施方式仅用以解释本发明,并不限定本发明的保护范围。
31.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
32.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
33.本发明中所述“第一”、“第二”不代表具体的数量及顺序,仅仅是用于名称的区分。
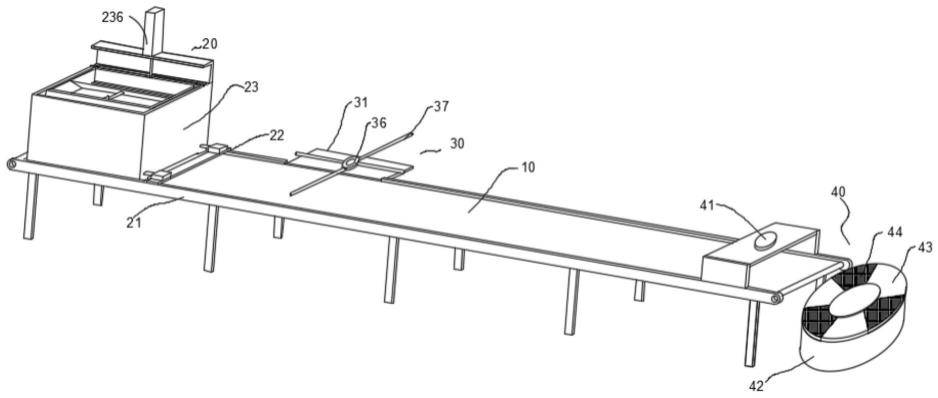
34.如图1所示,本发明一实施例中一种物料分拣系统,包括输送带10,输送带10沿长度方向依次布设有物料导入机构20、物料调距机构30以及分拣机构40,物料导入机构20包括安装于输送带10上方的平摊单元以及安装于输送带10两侧的导向板21,平摊单元包括安装在输送带10顶侧的安装架22,安装架22上安装有固定设置的驱动组件以及相对安装架22滑动配合的盛放架23,驱动组件的输出端与盛放架23固定安装,盛放架23的底部与输送带
10之间间距为工件的厚度,物料调距机构30安装于导向板21的一侧用于调整工件后续输送的间距,分拣机构40设置于输送带10的末端用于分拣出不同类型的工件。
35.上述分拣系统,通过设置物料导入机构20可以将物料以统一“躺平”姿态向后输送,防止其物料刮伤输送带10;通过设置物料调距机构30可以将调整完成后的物料等间距向后输送,防止在后侧出现拥堵,不利于物料的分拣处理;通过分拣机构40将调距处理完成后的物料进行高效分拣;其中物料导入机构20采用驱动组件、盛放架23以及导向板21、安装架22的设计结构,能够将盛放架23内部出料在驱动组件间接作用下使得其实现“躺平”姿态,消除物料出现叠加导致分拣出错的问题发生。
36.如图1和图2所示,具体地,所述驱动组件包括固定安装在安装架22上的平摊气缸或固定安装在安装架22上的驱动器(优选为电机),驱动器经传动机构与盛放架23连接,传动机构包括齿轮齿条机构、曲柄滑块机构或丝杠螺母机构中的一种,在本实施例中优选位平摊气缸,通过该种方案可以使得其结构简单,设备成本低,维护简单。
37.如图1和图2所示,具体地,所述驱动组件带动盛放架23的运动方向和物料输送方向一致,如此保证物料能够沿着输送方向实现平摊处理,在后期分拣构成中不会出现差错。
38.如图1和图5所示,在其中一个实施例中,所述物料调距机构30包括安装在导向板21侧壁底部的固定板31,固定板31上安装驱动电机32,驱动电机32的输出端固定安装有一驱动盘33,驱动盘33外周面上安装有凸起部331,固定板31上转动安装有限位爪34,限位爪34上设置有作用部,该作用部在凸起部331作用下向外侧弹开,限位爪34(优选为棘爪)和固定板31之间连接有复位弹簧35,固定板31上设置有调距组件。通过电机32带动凸起部331进行转动,使得凸起部331间歇作用限位爪34的作用部,作用部由于出现间歇式外弹,并在复位弹簧35的作用下实现自动复位,进而使得其调距组件配合输送带10的输送效率,来实现其调距效果。
39.如图5所示,具体地,所述调距组件包括转动安装在固定板31上的调节盘36,调节盘36上周向等间距设置有限位结构(优选为与棘爪适配的棘槽),限位结构与限位爪34相适配,调节盘36的顶部固定安装有调节件37,调节件37为多个周向等间距分布的限位杆,在本实施例中优选为四个限位杆。
40.如图1和图5所示,其中,驱动盘33、调节盘36均为水平设置,调节盘36所在位置处的导向板21上设置有对应的豁口,如此才能够实现调节盘36带动限位杆转动一定角度后将其一物料进行调距处理。
41.调距过程为:通过驱动电机32带动驱动盘33转动,当驱动盘33转动一周的过程中会经过凸起部331将作用部向外侧弹开,弹开就意味着限位爪34和限位结构分离,使得其调节盘36得到释放,输送带10将会带动物料将后运动,进而使得其发生转动,在限位杆371的作用下每次通过一个,当凸起部331和作用部不接触时,限位爪34会在转动90
°
(本实施例中优选地角度)后并在复位弹簧35的作用下,重新适配将下一个物料卡在两个限位杆371之间,进而配合输送带10的输送效果来实现物料的调距处理。
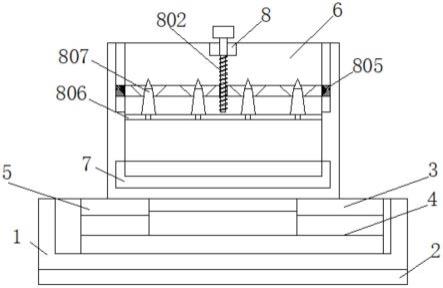
42.如图1、图2和图3所示,在其中一个实施例中,所述盛放架23的内部设置盛放斗231,盛放斗231的底部一侧设置有弹性开放口,盛放斗231的顶部设置有送料组件,盛放斗231的弹性开放口的底部设置有呈上下交错分布的多个姿态调整弧板232。
43.上述物料下放处理方案,经过送料组件盛放斗231内部的物料从弹性开放口处下
放,在经过弹性开放口下方的姿态调整弧板232进行姿态调整,使得最终落在输送带10上的物料处于“躺平”状态。
44.如图3和图4所示,具体地,所述弹性开放口包括转动安装在盛放斗231侧部的挡板233,挡板233的侧部设置有沿盛放斗231侧部转动设置的侧板234,侧板234和盛放斗231的侧部通过弹性伸缩件235(优选为弹簧)连接。送料组件的作用会使得盛放斗231内部的物料向下运动,使得其向下打开挡板233,当下放处理完成后,送料组件的作用消除后,挡板233会在弹性伸缩件235的作用下得到自动复位,重新封堵其盛放斗231的物料下放口。
45.如图3和图4所示,具体地,所述送料组件包括安装在盛放斗231顶部的驱动气缸236,驱动气缸236的输出端安装有下推板237,下推板237滑动安装在盛放斗231的内侧顶部,盛放斗231的内侧顶部安装有导向架238,下推板237包括固定部2371和活动部2372,固定部2371与驱动气缸236的输出端连接,活动部2372安装在固定部2371的一侧且与固定部2371通过弹簧连接。
46.上述下放物料方案,通过驱动气缸236带动下推板237下移,经过下推237的下移使得其物料得到有效地下放处理,下推板237采用活动部和固定部处理,使得其下推板237在下推物料时,即使物料出现倾斜状态,出现倾斜状态的物料如果全部在挡板223的正上方,则不会出现卡死现象,如果一部分位于挡板223的正上方、另一部部分仍然处于盛放斗231底板的正上方时,采用该种方案则不会影响其余物料的下放处理,如果没有该种结构设计则会出现卡死现象。
47.如图1和图2、图3所示,具体地,所述盛放斗231内部设置有顶推组件,顶推组件包括横向滑动安装在盛放斗231内侧的顶推板239,顶推板239背对工件的一侧设置有顶推件2310。
48.上述顶推物料方案,通过顶推件2310带其端部安装的顶推板239进行将物料进行顶推处理,可以将盛放斗231内部的物料进行规整,使得下推板237下推的物料处于竖直状态,利于物料下放处理。
49.如图3所示,在其中一个实施例中,所述姿态调整弧板232上的调整面上设置有若干个等间距分布的姿态调整阶梯。
50.上述物料下放过程中姿态调整方案,通过姿态调整弧板232上的姿态调整阶梯可以将下放的物料进行毫无先后顺序的调整其姿态,最终使得物料落在输送带上时处于“躺平”状态。
51.如图1和图6所示,在其中一个实施例中,所述分拣机构40包括安装在输送带10末端的openmv图像识别模块41和以及独立在输送带10末端后侧的分拣平台42,分拣平台42上转动安装有分拣转台43,分拣转台43的驱动装置设置于分拣平台42内部,分拣转台43上周向等间距分布有多个分拣区域,分拣区域处安装有分拣输送带44。
52.上述openmv图像识别分拣方案,可以根据openmv图像识别模块41分析物料外形状态,根据物料外形状态利于实现其物料的有效分拣,分拣对象可以为三角形、圆形、矩形等形状的物料,经过配合独立的分拣转台43将分拣平台42上的物料经分拣输送带44输送至对应的分拣区内作同一方式处理。
53.分拣的主控为是stm32单片机由其作为控制中枢来控制openmv图像识别模块41对由薄片零件形状的识别,针对获取的薄片零件进行进行图像预处理、图像矫正、图像特征提
取等步骤,完成了对薄片零件的形状特征的提取,识别之后就要进行对识别出来的物料进行分拣。
54.下面提供圆形和三角形的外形零件分拣算法:
55.识别圆的算法为:img.find_circles(roi=a.rect(),threshold=1800,x_margin=10,y_margin=10,r_margin=10,r_min=8,r_max=20,r_step=5),用他来进行对圆的识别在坐标x、y上且半径都为10的圆,其半径最大不大与20且不小于8。
56.识别三角形的算法为image.find_lines([roi[,x_stride=2[,y_stride=1[,threshold=1000[,theta_margin=25[,ho_margin=25]]]]]])函数公式,其代码意义为:使用霍夫变换查找图像中的所有直线。
[0057]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0058]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。