1.本发明涉及农业机械技术领域,具体涉及一种杭白菊采摘和收集一体式采摘器及其杭白菊采摘方法。
背景技术:
2.近年来我国杭白菊的种植面积快速增长,仅在桐乡市,常年种植规模稳定在50000亩左右,拥有1家国家级示范性专业合作社和7家杭白菊产业龙头企业。杭白菊以前常用于药用途径,现在还可用来开发饮料、生产保健产品等,市场广阔。但对于杭白菊种植农户而言,收获季节时存在用工冲突现象,且用工成本过高;同时杭白菊的生长高度差异较大,人工采摘强度大,难度高,且带露水的杭白菊因蒸制不及时易出现花朵腐烂的问题。
3.现有的杭白菊采摘器,综合采摘能力低,缺少采摘后花朵的收集与梳齿的清理,且花朵采摘精度低,漏摘率高、损伤率高,机械化程度低,难以与目前的智能机器人配合,因此提高杭白菊采摘器的机械化程度迫在眉睫。
技术实现要素:
4.本发明的目的为了克服上述技术的不足,提供一种杭白菊采摘和收集一体式采摘器及其杭白菊采摘方法。
5.为实现上述目的,本发明采用如下技术方案:
6.本发明一种杭白菊采摘和收集一体式采摘器,包括负风压管道、气缸固定板、气缸、驱动滑套、内骨架、连杆、弧形机械爪、刷毛、吸水海绵片、遮挡装置和梳齿装置。所述负风压管道外壁上固定有两块上、下间距布置的气缸固定板;所述气缸的缸体与两块气缸固定板均固定;气缸的活塞杆通过连接板与驱动滑套外侧固定;所述驱动滑套套置在负风压管道外,构成滑动副;驱动滑套外壁底端固定有n个沿周向等距布置的连接架,n≥3,每个连接架与一根连杆的一端分别铰接;所述负风压管道底端开设有n个沿周向等距布置的卡槽,n根内骨架的内端分别与对应一个卡槽铰接;每根连杆的另一端与对应一个内骨架靠近外端位置分别铰接;每个内骨架底部中间位置固定有一个弧形机械爪;所述驱动滑套外侧壁固定有多个沿周向等距布置的刷毛组,刷毛组由多个上下布置的刷毛构成;每相邻两个内骨架间均固定有吸水海绵片。
7.所述遮挡装置设有n个,包括遮挡板和遮挡板杆;所述遮挡板杆的一端与遮挡板通过固定架固定。
8.所述梳齿装置设有n个,包括支架、梳齿板和梳齿;所述支架的两侧均固定有一块梳齿板;各梳齿板的外端均固定有多个等距布置的梳齿。
9.优选地,所述负风压管道通过软管与离心式风机连接。
10.优选地,所述负风压管道底端位于各吸水海绵片上方位置处均设有若干通道。
11.优选地,所述气缸通过换向阀与压缩气瓶连接。
12.优选地,所述支架和梳齿板均呈圆弧形。
13.本发明一种杭白菊采摘和收集一体式采摘器的杭白菊采摘方法,具体如下:
14.单次精准采摘模式:
15.步骤一、每个内骨架的外端与一个遮挡装置的遮挡板杆另一端通过螺栓固定连接,且遮挡板杆朝下设置。
16.步骤二、控制机械臂将负风压管道移动到待采摘杭白菊正上方并下移使遮挡板靠近杭白菊;遮挡板在下移过程中,气缸的活塞杆向上运动,通过连接板带动驱动滑套相对于负风压管向上运动,驱动滑套通过各连杆带动各内骨架向上并向内聚拢,各内骨架底部固定的弧形机械爪和各遮挡板杆上固定的遮挡板均同步向外张开,此时张开的各遮挡板将遮挡杭白菊花朵的叶片撑开,使杭白菊花朵显露出来,各弧形机械爪的下端均位于杭白菊花朵的下表面。
17.步骤三、气缸的活塞杆向下运动,通过连接板带动驱动滑套相对于负风压管向下运动,驱动滑套通过各连杆带动各内骨架向下并向外张开,各内骨架上固定的弧形机械爪和各遮挡板杆上固定的遮挡板均同步向内聚拢,此时各弧形机械爪自由端相互靠拢形成环状。
18.步骤四、控制机械臂将负风压管道向上移动,此时各弧形机械爪依靠冲击力将杭白菊花朵拔下来;接着,控制机械臂将负风压管道移动到收集箱的上方并下降至释放高度;然后,气缸的活塞杆向上运动,使各内骨架底部固定的弧形机械爪和各遮挡板杆上固定的遮挡板均同步向外张开,从而使杭白菊花朵被释放掉落至收集箱内;最后,气缸的活塞杆向下运动,各内骨架上固定的弧形机械爪和各遮挡板杆上固定的遮挡板均同步向内聚拢复位。
19.批量采摘模式:
20.步骤一、每个内骨架的外端与一个梳齿装置的支架通过螺栓固定连接,且梳齿装置朝上设置。
21.步骤二、控制机械臂将负风压管道移动到杭白菊丛上方,并使各梳齿装置处于杭白菊丛内部。
22.步骤三、气缸的活塞杆向下运动,通过连接板带动驱动滑套相对于负风压管向下运动,驱动滑套通过各连杆带动各内骨架向下并向外张开,各内骨架上固定的梳齿装置均同步向下并向外张开,使各梳齿装置位于杭白菊丛中若干杭白菊花朵的下方。
23.步骤四、气缸的活塞杆向上运动,通过连接板带动驱动滑套相对于负风压管向上运动,驱动滑套通过各连杆带动各内骨架向上并向内聚拢,各内骨架上固定的梳齿装置均同步向上并向内聚拢;各梳齿装置上方若有杭白菊花朵,则被对应梳齿装置上固定的梳齿拔下来,被拔下的大部分杭白菊花朵直接顺着梳齿装置向下掉落,小部分卡在相邻两梳齿间隙的杭白菊花朵也被刷毛清理顺着梳齿装置向下掉落。
24.步骤五、顺着梳齿装置向下掉落的杭白菊花朵经过相邻内骨架所固定的吸水海绵片时,杭白菊花朵表面的水分被吸收;随后,杭白菊花朵被吸入负风压管道底端的通道内进行收集。
25.本发明具有的有益效果:
26.(1)本发明通过机械臂控制,可以到达杭白菊植株的任意高度,实现不同高度的杭白菊花朵的采摘。在采摘过程中具备两种模式,一种是单次精准采摘模式,另一种是批量采
摘模式。单次精准采摘模式下,各个弧形机械爪自由端相互靠拢形成环状,利用冲击力实现杭白菊单个花朵的精准采摘;机械臂带动本发明使遮挡板水平移动过程中,一定程度的避免由于花朵被枝叶挡住,无法被识别的情况,机械臂带动本发明向下移动且各遮挡板张开时,可撑开花朵周围的叶片,使花朵显露出来,各遮挡板聚拢时也可将叶片挡在外面。批量采摘模式下,通过向内聚拢梳齿,实现在梳齿范围内的杭白菊花朵的批量采摘,并采用中空的负风压管道,在负压的作用下,负风压管道内吸入批量杭白菊花朵,实现杭白菊花朵批量采摘后的收集。
27.(2)本发明每相邻两个内骨架间均固定有吸水海绵片,杭白菊花朵被梳齿拔下来,落至负风压管道底端过程中,吸水海绵片吸取杭白菊花朵表面的水分,防止带露水的杭白菊花朵因蒸制不及时造成花朵腐烂。
28.(3)本发明在驱动滑套表面带有毛刷,各梳齿装置采摘杭白菊后聚拢,毛刷穿过梳齿,使卡在梳齿上的杭白菊也能被刷落进行收集。
29.(4)本发明采用了圆弧形的梳齿装置,更容易聚拢花朵。
附图说明
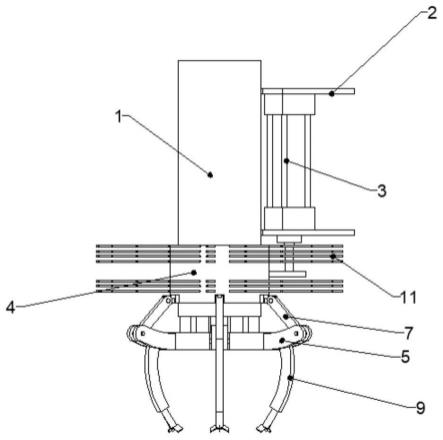
30.图1为本发明去除遮挡装置和梳齿装置后的整体结构示意图;
31.图2为本发明的负风压管道的结构示意图;
32.图3为本发明的机构运动简图;
33.图4为本发明单次精准采摘模式下张开状态示意图;
34.图5为本发明单次精准采摘模式下聚拢状态示意图;
35.图6为本发明批量采摘模式下张开状态示意图;
36.图7为本发明批量采摘模式下聚拢状态示意图。
具体实施方式
37.下面将结合附图,对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动条件下所获得的所有其它实施例,都属于本发明保护的范围。
38.如图1和图4所示,本发明一种杭白菊采摘和收集一体式采摘器,包括负风压管道1、气缸固定板2、气缸3、驱动滑套4、内骨架5、连杆7、弧形机械爪9、刷毛11、吸水海绵片、遮挡装置和梳齿装置。负风压管道1外壁上固定有两块上、下间距布置的气缸固定板2;气缸3的缸体与两块气缸固定板2均固定;气缸3的活塞杆通过连接板与驱动滑套4外侧固定;驱动滑套4套置在负风压管道1外,构成移动副;驱动滑套4外壁底端固定有n个沿周向等距布置的连接架,n=4,每个连接架与一根连杆7的一端分别铰接;负风压管道1底端开设有n个沿周向等距布置的卡槽,n根内骨架5的内端分别与对应一个卡槽铰接;每根连杆7的另一端与对应一个内骨架5靠近外端位置分别铰接;每个内骨架5底部中间位置固定有一个弧形机械爪9;驱动滑套4外侧壁固定有多个沿周向等距布置的刷毛组,刷毛组由多个上下布置的刷毛11构成,用于清理卡在相邻两梳齿10-3间隙的杭白菊;每相邻两个内骨架5间均固定有吸水海绵片,用于在批量采摘模式下吸取杭白菊的表面水分,防止带露水的杭白菊因蒸制不
及时出现花朵腐烂现象。
39.如图4所示,遮挡装置设有n个,包括遮挡板8和遮挡板杆;遮挡板杆的一端与遮挡板8通过固定架固定;单次精准采摘模式下,每个内骨架5的外端与一个遮挡装置的遮挡板杆另一端通过螺栓固定连接,遮挡板杆朝下设置。
40.梳齿装置设有n个,包括支架10-1、梳齿板10-2和梳齿10-3;支架10-1的两侧均固定有一块梳齿板10-2;各梳齿板10-2的外端均固定有多个等距布置的梳齿10-3。批量采摘模式下,每个内骨架5的外端与一个梳齿装置的支架10-1通过螺栓固定连接,且梳齿装置朝上设置。
41.作为一个优选实施例,如图6和图7所示,将n的取值改为6,其余结构完全不变。
42.作为一个优选实施例,负风压管道1通过软管与离心式风机连接,离心式风机由控制器控制。
43.作为一个优选实施例,如图2所示,负风压管道1底端位于各吸水海绵片上方位置处均设有若干通道。
44.作为一个优选实施例,气缸3通过换向阀与压缩气瓶连接,由压缩气瓶供气;换向阀由控制器控制。
45.作为一个优选实施例,如图6所示,支架10-1和梳齿板10-2均呈圆弧形。
46.本发明一种杭白菊采摘和收集一体式采摘器的杭白菊采摘方法,具体如下:
47.单次精准采摘模式:
48.步骤一、每个内骨架5的外端与一个遮挡装置的遮挡板杆另一端通过螺栓固定连接,且遮挡板杆朝下设置。
49.步骤二、控制机械臂将负风压管道1(预先将负风压管道与机械臂末端固定)移动到待采摘杭白菊正上方并下移使遮挡板8靠近杭白菊;遮挡板8在下移过程中,气缸1的活塞杆向上运动,通过连接板带动驱动滑套4相对于负风压管1向上运动,驱动滑套4通过各连杆7带动各内骨架5向上并向内聚拢,各内骨架5底部固定的弧形机械爪9和各遮挡板杆上固定的遮挡板8均同步向外张开,如图3和图4所示,此时张开的各遮挡板8将遮挡花朵的叶片撑开,使花朵显露出来,各弧形机械爪9的下端均位于杭白菊花朵的下表面。
50.步骤三、气缸1的活塞杆向下运动,通过连接板带动驱动滑套4相对于负风压管1向下运动,驱动滑套4通过各连杆7带动各内骨架5向下并向外张开,各内骨架5上固定的弧形机械爪9和各遮挡板杆上固定的遮挡板8均同步向内聚拢,如图5所示,此时各弧形机械爪自由端(底端)相互靠拢形成环状。
51.步骤四、控制机械臂将负风压管道1向上移动,此时各弧形机械爪依靠冲击力将杭白菊花朵拔下来;接着,控制机械臂将负风压管道1移动到收集箱的上方并下降至释放高度;然后,气缸1的活塞杆向上运动,使各内骨架5底部固定的弧形机械爪9和各遮挡板杆上固定的遮挡板8均同步向外张开,从而使杭白菊花朵被释放掉落至收集箱内;最后,气缸1的活塞杆向下运动,各内骨架5上固定的弧形机械爪9和各遮挡板杆上固定的遮挡板8均同步向内聚拢复位。
52.批量采摘模式:
53.步骤一、每个内骨架5的外端与一个梳齿装置的支架10-1通过螺栓固定连接,且梳齿装置朝上设置。
54.步骤二、控制机械臂将负风压管道1移动到杭白菊丛上方,并使各梳齿装置处于杭白菊丛内部。
55.步骤三、气缸1的活塞杆向下运动,通过连接板带动驱动滑套4相对于负风压管1向下运动,驱动滑套4通过各连杆7带动各内骨架5向下并向外张开,各内骨架5上固定的梳齿装置均同步向下并向外张开,如图6所示,使各梳齿装置位于杭白菊丛中若干花朵的下方。
56.步骤四、气缸1的活塞杆向上运动,通过连接板带动驱动滑套4相对于负风压管1向上运动,驱动滑套4通过各连杆7带动各内骨架5向上并向内聚拢,各内骨架5上固定的梳齿装置均同步向上并向内聚拢,如图7所示;各梳齿装置上方若有杭白菊花朵,则被对应梳齿装置上固定的梳齿10-3拔下来,被拔下的大部分杭白菊花朵直接顺着梳齿装置向下掉落,小部分卡在相邻两梳齿10-3间隙的杭白菊花朵也会被刷毛11清理顺着梳齿装置向下掉落。
57.步骤五、顺着梳齿装置向下掉落的杭白菊花朵经过相邻内骨架5所固定的吸水海绵片时,杭白菊花朵表面的水分被吸收;随后,杭白菊花朵被吸入负风压管道1底端的通道内进行收集。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。