1.本发明涉及的机器人加工的技术领域,尤其涉及一种多滑块分组铰接的均载滑台机构。
背景技术:
2.导轨滑块具有结构紧凑、传动平稳、承载能力大、精度高等许多优点,在机床及有自动化传输需求等的多个领域有着广泛的应用。导轨滑块可以单独使用,一般成组使用,例如2个、4个、6个、8个或更多,增加滑块的使用块数量可以明显提高滑台的承载能力,对于有重载荷传输需求的场合,这是一种常用的解决方法。
3.但是随着滑块使用数量的增多,对安装导轨的底座和安装滑块的滑板的结构及精度将有更高的要求,对导轨的安装及调整难度也越来越大,同时过多滑块的同时使用,难以保证全部的滑块的受力均匀,受力最大的滑块和导轨会过早出现损坏。
技术实现要素:
4.针对现有的滑块安装存在的上述问题,现旨在提供一种受力均匀、安装方便和使用寿命高的多滑块分组铰接的均载滑台机构。
5.具体技术方案如下:
6.一种多滑块分组铰接的均载滑台机构,包括:至少两导轨、至少一均载组件和滑板,所述滑板通过所述均载组件滑动安装在两所述导轨上,所述均载组件包括承载平台、支撑架和两滑动构件,所述承载平台固定在所述滑板的底部,所述支撑架设于所述承载平台的下方,两所述滑动构件分别滑动安装在两所述导轨上,并分别位于所述支撑架的两端,所述滑动构件包括:
7.两滑块,两所述滑块滑动安装在所述导轨上;
8.连接架,所述连接架设于两所述滑块之间,并位于所述滑块的上方,所述承载平台与所述支撑架之间、所述支撑架与所述连接架之间、所述连接架与所述滑块之间均通过球铰链结构连接。
9.作为本方案的进一步改进以及优化,所述球铰链结构包括:
10.关节轴承,所述关节轴承安装在所述支撑架或所述连接架或所述承载平台上;
11.球体,所述球体转动安装在所述关节轴承内;
12.连接杆,所述连接杆的一端与所述球体固定、另一端与所述滑块或所述连接架或所述支撑架固定。
13.作为本方案的进一步改进以及优化,所述关节轴承包括安装部和转动部,所述安装部固定在所述支撑架或所述连接架或所述承载平台上,所述转动部转动设于所述安装部内,所述转动部内设有球窝,所述球体活动设于所述球窝内。
14.作为本方案的进一步改进以及优化,所述承载平台位于所述支撑架的中部位置。
15.作为本方案的进一步改进以及优化,所述支撑架与所述连接架垂直设置,并位于
所述连接架的中部位置。
16.作为本方案的进一步改进以及优化,所述滑台机构还包括:
17.底座,所述导轨设于所述底座上;
18.机器人,所述机器人固定在所述滑板上的顶部;
19.驱动组件,所述驱动组件所述滑板与所述底座之间,用于驱使所述滑板沿所述导轨的引导方向进行滑动。
20.作为本方案的进一步改进以及优化,所述驱动组件包括:
21.伺服电机,所述伺服电机固定在所述滑板上;
22.传动构件,所述传动构件设于所述伺服电机与所述底座之间,用于将所述伺服电机的旋转动力转换为所述滑板的线性动力,以使所述滑板沿所述导轨的引导方向运动。
23.作为本方案的进一步改进以及优化,所述传动构件包括:
24.驱动齿条,所述驱动齿条固定在所述底座上,并与所述导轨的引导方向平行设置;
25.驱动齿轮,所述驱动齿轮同轴固定在所述伺服电机的输出轴上,并与所述驱动齿条啮合连接。
26.上述技术方案与现有技术相比具有的积极效果是:
27.(1)本发明中滑板进行载荷时,将通过承载平台、支撑架、连接架以及球铰链结构向滑块施加载荷压力,由于承载平台与支撑架之间、支撑架与连接架之间以及连接架与滑块之间均通过球铰链结构进行连接安装,并形成杠杆结构安装方式,因此四个滑块始终均分滑板的载荷压力,使四个滑块受力均匀,达到相同的使用寿命,方便后期同时维护更换。
28.(2)本发明中当导轨的存在垂直方向或水平方向的安装误差时,滑块沿垂直方向或水平方向的误差位移将映射在承载平台上,由于滑块采用球铰链结构进行安装,映射在承载平台产生误差位移小于滑块自身的误差位移,起到弱化误差的作用,从而降低导轨的安装和调整难度。
附图说明
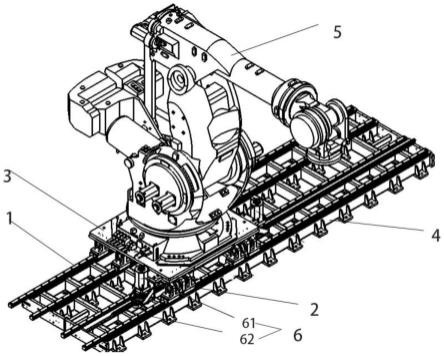
29.图1为本发明一种多滑块分组铰接的均载滑台机构的整体结构示意图;
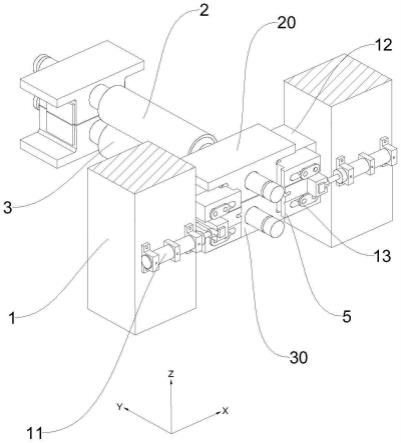
30.图2为本发明一种多滑块分组铰接的均载滑台机构的均载组件和滑轨之间的安装示意图;
31.图3为本发明一种多滑块分组铰接的均载滑台机构的均载组件的结构示意图;
32.图4为本发明一种多滑块分组铰接的均载滑台机构的关节轴承的结构示意图;
33.附图中:1、导轨;2、均载组件;3、滑板;4、底座;5、机器人;6、驱动组件;21、承载平台;22、支撑架;23、滑动构件;24、球铰链结构;61、伺服电机;62、驱动齿条;231、滑块;232、连接架;241、关节轴承;242、球体;243、连接杆;2411、安装部;2412、转动部;2413、球窝。
具体实施方式
34.下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
35.图1为本发明一种多滑块分组铰接的均载滑台机构的整体结构示意图,图2为本发明一种多滑块分组铰接的均载滑台机构的均载组件和滑轨之间的安装示意图,图3为本发明一种多滑块分组铰接的均载滑台机构的均载组件的结构示意图,图4为本发明一种多滑
块分组铰接的均载滑台机构的关节轴承的结构示意图,如图1至图4所示,示出了一种较佳实施例的一种多滑块231分组铰接的均载滑台机构,包括:至少两导轨1、至少一均载组件2和滑板3,滑板3通过均载组件2滑动安装在两导轨1上,均载组件2包括承载平台21、支撑架22和两滑动构件23,承载平台21固定在滑板3的底部,支撑架22设于承载平台21的下方,两滑动构件23分别滑动安装在两导轨1上,并分别位于支撑架22的两端,滑动构件23包括两滑块231、连接架232,两滑块231滑动安装在导轨1上,连接架232设于两滑块231之间,并位于滑块231的上方,承载平台21与支撑架22之间、支撑架22与连接架232之间、连接架232与滑块231之间均通过球铰链结构24连接。
36.进一步的,作为一种较佳的实施例,球铰链结构24包括关节轴承241、球体242和连接杆243,关节轴承241安装在支撑架22或连接架232或承载平台21上,球体242转动安装在关节轴承241内,且球体242具有三个自由度,连接杆243的一端与球体242固定、另一端与滑块231或连接架232或支撑架22固定。
37.进一步的,作为一种较佳的实施例,关节轴承241包括安装部2411和转动部2412,安装部2411固定在支撑架22或连接架232或承载平台21上,转动部2412转动设于安装部2411内,并具有三个自由度,转动部2412内设有球窝2413,球体242活动设于球窝2413内。
38.进一步的,作为一种较佳的实施例,承载平台21位于支撑架22的中部位置。
39.进一步的,作为一种较佳的实施例,支撑架22与连接架232垂直设置,并位于连接架232的中部位置。
40.本实施例中滑板3进行载荷时,将通过承载平台21、支撑架22、连接架232以及球铰链结构24向滑块231施加载荷压力,由于承载平台21与支撑架22之间、支撑架22与连接架232之间以及连接架232与滑块231之间均通过球铰链结构24进行连接安装,并形成杠杆结构安装方式,因此四个滑块231始终均分滑板3的载荷压力,使四个滑块231受力均匀,达到相同的使用寿命,方便后期同时维护更换。
41.本实施例中当导轨1的存在垂直方向或水平方向的安装误差时,滑块231沿垂直方向或水平方向的误差位移将映射在承载平台21上,由于滑块231采用球铰链结构24进行安装,映射在承载平台21产生误差位移小于滑块231自身的误差位移,起到弱化误差的作用,从而降低导轨1的安装和调整难度。
42.进一步的,作为一种较佳的实施例,滑台机构还包括底座4、机器人5和驱动组件6,导轨1设于底座4上,机器人5固定在滑板3上的顶部,驱动组件6滑板3与底座4之间,用于驱使滑板3沿导轨1的引导方向进行滑动。
43.进一步的,作为一种较佳的实施例,驱动组件6包括伺服电机61和传动构件,伺服电机61固定在滑板3上,传动构件设于伺服电机61与底座4之间,用于将伺服电机61的旋转动力转换为滑板3的线性动力,以使滑板3沿导轨1的引导方向运动。
44.进一步的,作为一种较佳的实施例,传动构件包括驱动齿条62和驱动齿轮(图中未示出),驱动齿条62固定在底座4上,并与导轨1的引导方向平行设置,驱动齿轮同轴固定在伺服电机61的输出轴上,并与驱动齿条62啮合连接。
45.本实施例在使用时,伺服电机61带动驱动齿轮转动,由于驱动齿轮与驱动齿条62啮合连接,将通过滑板3带动机器人5在导轨1上运动并加工,同时机器人5在加工作业过程中,施加于滑板3的载荷通过均载组件2平分于四个滑块231,使四个滑块231所受的载荷压
力始终保持相等。
46.本实施例中伺服电机61通过驱动齿轮与驱动齿条62传动使滑板3进行运动,使伺服电机61动力传递的稳定性更高。
47.以上所述仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。