1.本发明涉及爬架焊接技术领域,更具体地说,涉及一种建筑爬架铰链轴套的焊接机构及其焊接方法。
背景技术:
2.爬架是建筑施工中经常用到的施工工具,爬架是搭设一定高度并附着于主体工程结构上,并依靠自身的升降设备和辅助装置,可随主体工程结构逐层爬升或下降,具有防倾覆、防坠落装置的外脚手架。
3.爬架的主体是由多根杆件作为组件而焊接成的框架结构,在框架结构上需焊接铰链轴套,以便在爬架上安装铰接部件。现有爬架的焊接设备中,只对其框架结构进行定位焊接,铰链轴套是采用人工的方式进行上料、定位和焊接的。然而,人工方式存在定位工作量大、定位精度低和劳动强度大的问题,从而大大降低焊接质量。另外,人工焊接质量差且不容易控制焊接变形量,直接影响爬架的合格率,增加后续矫正的难度,因此整个爬架的生产过程普遍效率低下,产品质量不稳定。
技术实现要素:
4.本发明的目的在于克服现有技术中的缺点与不足,提供一种建筑爬架铰链轴套的焊接机构,该焊接机构可实现铰链轴套自动和快速焊接,从而提高建筑爬架的焊接质量。本发明还提供一种快速和高效的铰链轴套焊接方法。
5.为了达到上述目的,本发明通过下述技术方案予以实现:一种建筑爬架铰链轴套的焊接机构,其特征在于:包括:
6.机架;
7.用于对铰链轴套送料的铰链轴套送料装置;
8.用于对爬架框架结构进行入料、定位、转动和出料的框架工作平台;
9.用于对框架工作平台上的爬架框架结构进行定位的框架定位装置;
10.用于对铰链轴套上料至爬架框架结构上并定位的铰链轴套上料装置;
11.以及用于对铰链轴套焊接至爬架框架结构上的铰链轴套焊接机器人;
12.所述框架工作平台可转动设置在机架上;所述框架定位装置设置在机架上并位于框架工作平台的上方和侧部;所述铰链轴套送料装置、铰链轴套上料装置和铰链轴套焊接机器人均设置在机架上。
13.在上述方案中,本发明的焊接机构集合了对爬架框体结构的入料、定位、转动和出料,以及铰链轴套的送料、上料和定位焊接的功能,可以实现铰链轴套的自动化和快速焊接,从而提高建筑爬架的焊接质量。另外,本发明的焊接机构结构简化,框架工作平台可实现爬架框体结构的入料、承接、定位、旋转和出料,从而大大节约焊接机构的占用空间。
14.所述框架工作平台包括旋转平台、旋转平台驱动组件、用于对爬架框架结构进行入料的入料组件和用于对焊接有铰链轴套的爬架框架结构进行出料的出料组件;所述旋转
平台通过旋转平台驱动组件与机架可转动连接;所述入料组件与出料组件相互垂直设置在旋转平台上,出料组件还设置有用于对通过入料组件入料的爬架框架结构进行阻挡定位的框架挡板。
15.所述入料组件和出料组件均包括驱动电机、传动部件和输送线;所述驱动电机通过传动部件与输送线连接;所述入料组件的输送线设置在机架上;所述出料组件的输送线可升降设置在机架上。
16.所述出料组件的输送线可升降设置在机架上是指:所述出料组件还包括顶升部件;所述顶升部件设置在机架上,并且顶升部件的驱动端与出料组件的输送线连接,实现驱动出料组件的输送线上升以承接入料组件上的爬架框架结构。本发明方案巧妙,将入料组件和出料组件均设置在框架工作平台上,可大大节省机构空间,也简化机械结构。另外,由于框架工作平台为可旋转结构,可以旋转的方式将出料机构与场地需求的出料工位相对接实现焊接有铰链轴套的爬架框架结构出料,从而提高该焊接机构的通用性和实用性。
17.所述旋转平台驱动组件包括设置在机架上的旋转平台驱动电机、旋转齿轮一和旋转齿轮二;所述旋转平台带有旋转轴;所述旋转齿轮二通过轴承与旋转轴连接,旋转齿轮一与旋转平台驱动电机的驱动端连接,并与旋转齿轮二啮合连接。
18.所述框架定位装置包括定位夹手和限位气缸;所述定位夹手为可升降结构,定位夹手设置在机架上并位于框架工作平台的上方;所述限位气缸设置在机架上并位于入料组件的末端。当爬架框架结构通过入料组件输送至框架工作平台时,限位气缸可对爬架框架结构进行限位,同时,定位夹手下降并夹持爬架框架结构,实现对爬架框架结构进行定位。
19.所述铰链轴套送料装置包括振动盘、直线振动输送线、送料驱动部件和定位模;所述振动盘设置在机架上并由螺旋形轨道形成;所述直线振动输送线的一端与振动盘对接,另一端作为送料口,定位模设置在直线振动输送线的送料口处;所述送料驱动部件位于送料口侧部并与定位模相对;工作时,送料驱动部件的驱动端插入定位模以对铰链轴套进行阻挡,或者送料驱动部件的驱动端离开送料口,铰链轴套通过直线振动输送线输送并定位在送料口。
20.本发明的送料驱动部件可对直线振动输送线的铰链轴套进行阻挡,使得铰链轴套上料装置可对铰链轴套逐个进行上料,而且送料驱动部件的驱动端离开送料口后,驱动端与定位模可作为铰链轴套的定位部件,因此,该送料驱动部件可作为隔料部件和定位部件。
21.所述铰链轴套上料装置包括上料架、x轴移动气缸、y轴移动气缸、z轴移动气缸、旋转气缸和铰链轴套夹持气缸;所述上料架与机架连接,x轴移动气缸设置在上料架上并与y轴移动气缸连接,实现驱动y轴移动气缸沿机架长度方向移动;所述y轴移动气缸分别与z轴移动气缸连接,实现驱动z轴移动气缸沿机架宽度方向移动;所述z轴移动气缸与旋转气缸连接,实现驱动旋转气缸沿机架高度方向移动;所述铰链轴套夹持气缸与旋转气缸连接。本发明采用三轴联动的移动方式以及旋转的方式将铰链轴套上料至爬架框架结构,并对铰链轴套进行定位。
22.一种建筑爬架铰链轴套的焊接方法,其特征在于:包括铰链轴套送料工序、爬架框架结构入料工序、铰链轴套上料工序、铰链轴套焊接工序和爬架框架结构出料工序;
23.铰链轴套送料工序是指将铰链轴套逐个输送至送料口并对送料口的铰链轴套进行定位;
24.爬架框架结构入料工序是指将爬架框架结构输送至框架工作平台并进行定位;
25.铰链轴套上料工序是指采用三轴联动和旋转的方式对定位在送料口的铰链轴套夹持并将铰链轴套定位至爬架框架结构;
26.铰链轴套焊接工序是指将铰链轴套焊接至爬架框架结构上,焊接过程中旋转爬架框架结构进行铰链轴套的换位焊接;
27.爬架框架结构出料工序是指以顶升方式承接焊接有铰链轴套的爬架框架结构,对焊接有铰链轴套的爬架框架结构进行输送出料,或者对焊接有铰链轴套的爬架框架结构进行旋转并输送出料。
28.在上述方案中,本发明通过铰链轴套送料工序、爬架框架结构入料工序、铰链轴套上料工序、铰链轴套焊接工序和爬架框架结构出料工序实现铰链轴套快速和高效的自动化焊接,从而提高建筑爬架的自动化生产和生产效率。
29.在爬架框架结构出料工序中,以顶升方式承接焊接有铰链轴套的爬架框架结构,对焊接有铰链轴套的爬架框架结构进行输送出料,或者对焊接有铰链轴套的爬架框架结构进行旋转并输送出料是指:框架工作平台为可旋转结构,框架工作平台设置有入料组件和可升降的出料组件,入料组件和出料组件相互垂直设置;当铰链轴套焊接工序完成后,顶升方式实现出料组件上升以承接入料组件上焊接有铰链轴套的爬架框架结构,通过出料组件对焊接有铰链轴套的爬架框架结构输送出料至出料工位,或者旋转框架工作平台使得出料组件与出料工位对接,通过出料组件对焊接有铰链轴套的爬架框架结构输送出料至出料工位。
30.与现有技术相比,本发明具有如下优点与有益效果:
31.1、本发明建筑爬架铰链轴套的焊接机构可实现铰链轴套自动和快速焊接,从而提高建筑爬架的焊接质量。
32.2、本发明建筑爬架铰链轴套的焊接方法可快速和高效实现铰链轴套的自动化焊接,从而提高建筑爬架的自动化生产和生产效率。
附图说明
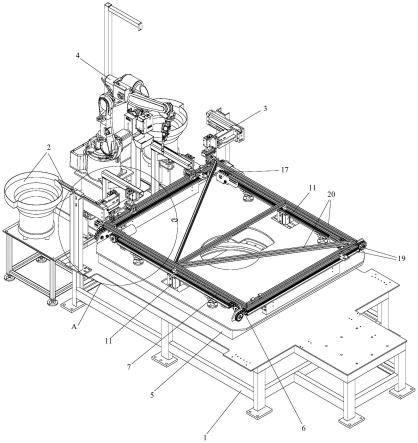
33.图1是本发明建筑爬架铰链轴套的焊接机构示意图;
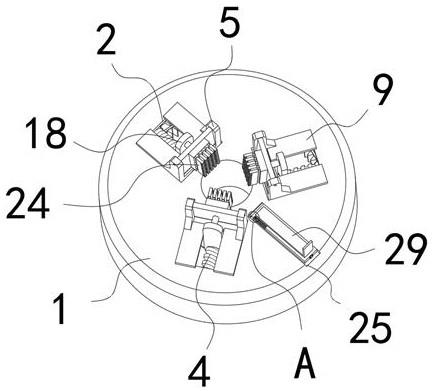
34.图2是图1中a处放大图;
35.图3是本发明旋转平台与机架连接的示意图;
36.图4是本发明铰链轴套上料装置的示意图;
37.图5是本发明铰链轴套送料装置的示意图;
38.其中,1为机架、2为铰链轴套送料装置、2.1为振动盘、2.2为直线振动输送线、2.3为直线振动模块、2.4为送料驱动气缸、2.5为定位模、2.6为送料口、3为铰链轴套上料装置、3.1为上料架、3.2为x轴移动气缸、3.3为y轴移动气缸、3.4为z轴移动气缸、3.5为旋转气缸、3.6为铰链轴套夹持气缸、4为铰链轴套焊接机器人、5为旋转平台、5.1为旋转轴、6为入料组件、7为出料组件、8为框架挡板、9为传动部件、10为输送轮、11为顶升气缸、12为驱动电机、13为旋转平台驱动电机、14为旋转齿轮一、15为旋转齿轮二、16为轴承、17为定位夹手、18为限位气缸、19为铰链轴套、20为爬架框架结构、21为旋转平台销套、22为旋转平台定位销、23为旋转平台导套、24为旋转平台定位销驱动件。
具体实施方式
39.下面结合附图与具体实施方式对本发明作进一步详细的描述。
40.实施例
41.本发明建筑爬架铰链轴套的焊接机构包括:
42.机架1;
43.用于对铰链轴套19送料的铰链轴套送料装置2;
44.用于对爬架框架结构20进行入料、定位、转动和出料的框架工作平台;
45.用于对框架工作平台上的爬架框架结构20进行定位的框架定位装置;
46.用于对铰链轴套19上料至爬架框架结构20上并定位的铰链轴套上料装置3;
47.以及用于对铰链轴套19焊接至爬架框架结构20上的铰链轴套焊接机器人4;
48.其中,框架工作平台可转动设置在机架1上,框架定位装置设置在机架1上并位于框架工作平台的上方和侧部,铰链轴套送料装置2、铰链轴套上料装置3和铰链轴套焊接机器人4均设置在机架1上。
49.具体地说,框架工作平台包括旋转平台5、旋转平台驱动组件、用于对爬架框架结构20进行入料的入料组件6和用于对焊接有铰链轴套19的爬架框架结构20进行出料的出料组件7,其中,旋转平台5通过旋转平台驱动组件与机架1可转动连接,入料组件6与出料组件7相互垂直设置在旋转平台5上,出料组件7还设置有用于对通过入料组件6入料的爬架框架结构20进行阻挡定位的框架挡板8。
50.该入料组件6和出料组件7均包括驱动电机12、传动部件9和采用输送轮10作为输送线,驱动电机12通过传动部件9与输送轮10连接。该入料组件6的输送线是设置在机架1上的。而出料组件7还包括顶升气缸11,该顶升气缸11设置在机架1上,并且顶升气缸11的驱动端与出料组件7的输送线连接,实现驱动出料组件7的输送线上升以承接入料组件6上的爬架框架结构20。
51.本发明的旋转平台驱动组件包括设置在机架1上的旋转平台驱动电机13、旋转齿轮一14和旋转齿轮二15,其中,旋转平台5带有旋转轴5.1,旋转齿轮二15通过轴承16与旋转轴5.1连接,旋转齿轮一14与旋转平台驱动电机13的驱动端连接,并与旋转齿轮二15啮合连接,实现旋转平台驱动电机13通过旋转齿轮一14和旋转齿轮二15驱动旋转平台5转动。为了提高焊接的稳定性,该旋转平台的底部还设置有旋转平台定位部件,该旋转平台定位部件包括设置在旋转平台5底部的旋转平台销套21、旋转平台定位销22、旋转平台导套23和旋转平台定位销驱动件24,其中,旋转平台导套23设置在机架1上,旋转平台定位销驱动件24设置在旋转平台导套23上并与旋转平台定位销22连接,实现驱动旋转平台定位销22插接旋转平台销套21进行旋转平台5的定位。
52.本发明的框架定位装置包括定位夹手17和限位气缸18,其中,定位夹手17为可升降结构,定位夹手17设置在机架1上并位于框架工作平台的上方,限位气缸18设置在机架1上并位于入料组件6的末端。当爬架框架结构20通过入料组件6输送至框架工作平台时,限位气缸18可对爬架框架结构20进行限位,同时,定位夹手17下降并夹持爬架框架结构20,实现对爬架框架结构20进行定位。
53.本发明的铰链轴套送料装置2包括振动盘2.1、直线振动输送线2.2、直线振动模块2.3、送料驱动气缸2.4和定位模2.5,其中,振动盘2.1设置在机架1上并由螺旋形轨道形成,
直线振动模块2.3与机架1连接并与直线振动输送线2.2的底部相贴,而直线振动输送线2.2的一端与振动盘2.1对接,另一端作为送料口2.6,定位模2.5设置在直线振动输送线2.2的送料口2.6处,送料驱动气缸2.4位于送料口2.6侧部并与定位模2.5相对。工作时,送料驱动气缸2.4的驱动端插入定位模2.5以对铰链轴套19进行阻挡,或者送料驱动气缸2.4的驱动端离开送料口2.6,铰链轴套19通过直线振动输送线2.2输送并定位在送料口2.6。
54.本发明的铰链轴套上料装置3包括上料架3.1、x轴移动气缸3.2、y轴移动气缸3.3、z轴移动气缸3.4、旋转气缸3.5和铰链轴套夹持气缸3.6,其中,上料架3.1与机架1连接,x轴移动气缸3.2设置在上料架3.1上并与y轴移动气缸3.3连接,实现驱动y轴移动气缸3.3沿机架1长度方向移动;y轴移动气缸3.3分别与z轴移动气缸3.4连接,实现驱动z轴移动气缸3.4沿机架1宽度方向移动,z轴移动气缸3.4与旋转气缸3.5连接,实现驱动旋转气缸3.5沿机架1高度方向移动,铰链轴套夹持气缸3.6与旋转气缸3.5连接。本发明采用三轴联动的移动方式以及旋转的方式将铰链轴套19上料至爬架框架结构20,并对铰链轴套19进行定位。
55.本发明建筑爬架铰链轴套的焊接方法是这样的:包括铰链轴套送料工序、爬架框架结构入料工序、铰链轴套上料工序、铰链轴套焊接工序和爬架框架结构出料工序;
56.其中,铰链轴套送料工序是指将铰链轴套19逐个输送至送料口2.6并对送料口2.6的铰链轴套19进行定位;
57.爬架框架结构入料工序是指将爬架框架结构20输送至框架工作平台并进行定位;
58.铰链轴套上料工序是指采用三轴联动和旋转的方式对定位在送料口2.6的铰链轴套19夹持并将铰链轴套19定位至爬架框架结构20;
59.铰链轴套焊接工序是指将铰链轴套19焊接至爬架框架结构20上,焊接过程中旋转爬架框架结构20进行铰链轴套19的换位焊接;
60.爬架框架结构出料工序是指以顶升方式承接焊接有铰链轴套19的爬架框架结构20,对焊接有铰链轴套19的爬架框架结构20进行输送出料,或者对焊接有铰链轴套19的爬架框架结构20进行旋转并输送出料。
61.在爬架框架结构出料工序中,以顶升方式承接焊接有铰链轴套19的爬架框架结构20,对焊接有铰链轴套19的爬架框架结构20进行输送出料,或者对焊接有铰链轴套19的爬架框架结构20进行旋转并输送出料是指:当铰链轴套19焊接工序完成后,顶升方式实现出料组件7上升以承接入料组件6上焊接有铰链轴套19的爬架框架结构20,通过出料组件7对焊接有铰链轴套19的爬架框架结构20输送出料至出料工位,或者旋转框架工作平台使得出料组件7与出料工位对接,通过出料组件7对焊接有铰链轴套19的爬架框架结构20输送出料至出料工位。
62.上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。